五相感应电机转矩跟踪电子变极方法
2015-02-23尹溶森杨磊杨家强黄进王亭李烨徐建华
尹溶森,杨磊,杨家强,黄进,王亭,李烨,徐建华
(1.浙江大学电气工程学院,浙江杭州 310027;2.江苏江阴振江钢结构有限公司,江苏江阴 214400)
五相感应电机转矩跟踪电子变极方法
尹溶森1,杨磊1,杨家强1,黄进1,王亭1,李烨1,徐建华2
(1.浙江大学电气工程学院,浙江杭州 310027;2.江苏江阴振江钢结构有限公司,江苏江阴 214400)
针对五相感应电机在传统变极方法控制时,变极过程中电机转矩急剧下降和转速波动明显的问题,利用多相电机具有多个控制平面的特点,在五相感应电机转子磁场定向矢量控制的基础上,提出了一种基于转矩跟踪的电子变极方法。利用多相系统变换理论,把五相感应电机分解为1对极和2对极两个控制平面,在执行1对极和2对极间的变极调速中,采用转矩跟踪的方法控制,通过转子磁场定向矢量控制同时产生1对极和2对极的驱动电流,控制变极暂态过程中转矩的变化,实现转矩与转速均平稳的电子变极调速。通过实验验证了所提出的方法能够在不停电的情况下实现平滑的电子变极调速,减小了转矩的下降和转速的波动。
多相电机;转矩跟踪;电子变极;矢量控制;转矩波动
0 引言
多相感应电机具有转矩密度高、每相定子电流低、转矩脉动小、多个控制自由度和容错性强等特点,在舰船推进系统、航空器驱动、飞轮储能系统、电动汽车驱动等领域的应用越来越广泛[1-7]。在某些应用场合,如汽车启动/发电一体机、多电航空发电机等要求电机启动时能提供大的启动转矩实现较快加速,又要求启动后能长期运行在高速范围,即让多相电机调速系统具有低速大转矩,并且具有宽广的恒功率调速运行范围特性。基于上述要求,很多学者利用多相电机具有多个控制自由度的特点,尝试变频调速加上变极方法来实现低速大转矩和拓宽高速度范围。
学者钱罗奋在文献[8]提出一种交流电机2Δ/ 3Δ换相变极法,在低速时采用大极对数,在高速时采用小极对数,实现了低速大转矩和宽广的恒功率运行范围,但是这种方法本质上还是一种传统的通过接触开关的不停电变极方法,切换过程是不连续的,会产生冲击电流和冲击转矩。T.A.Lipo在文献[9]中对一台6相电机进行了1对极和2对极之间的变极调速研究,实现了最基本的电子变极,拓宽了恒功率运行范围,但在变极的暂态过程中转矩显著下降。笔者所在课题组在文献[10]中基于9相感应电机转差频率控制,采用阶跃响应的方法在不停电情况下进行电子变极调速,实现了低速大转矩,拓宽了转速运行范围,但是在变极过程中转矩也产生了比较大的跌落,其动态性能不太理想;在文献[11]中,项目组在5相感应电机矢量控制的基础上又提出了一种指数响应电子变极方法,使变极程中转矩和转速的波动大大降低,达到了比较理想的效果,但该方法属于一种通过控制电流间接控制转矩的变极控制方法。
为了解决间接控制转矩变极方法带来转矩和转速波动的问题,控制转矩跌落和转速波动,实现平稳的变极。在上述文献和本课题组研究的基础上,本文基于转矩直接控制的思想,提出了一种转矩跟踪电子变极方法。
1 五相感应电机数学模型和矢量控制
1.1 电压和转矩方程

在自然坐标系下,多相电机通用电压方程如式(1)所示,式中:U、I、R和L分别为电压、电流、电阻和电感矩阵;下标s、r分别表示定、转子;sr表示互感。
多相感应电机转子磁场定向的矢量控制是在同步速坐标系下将定子电流、电压等变换成直流分量来达到解耦控制的目的,文中采用对称5相感应电机其恒功率坐标变换矩阵Cs如式(2)所示,该矩阵实现了5相系统的解耦[12]。

那么采用矩阵Cs对5相感应电机进行恒功率坐标变换,矩阵Cs的第1、2行构成d1-q1基波平面,也叫1对极控制平面;第3、4行构成了d2-q2二次谐波平面,也叫2对极控制平面;1对极和2对极两个平面相互正交,实现了同步旋转坐标系下的解耦,其d1-q1基波平面和d2-q2二次谐波平面的电压方程和转矩方程分别如式(3)、式(4)所示。
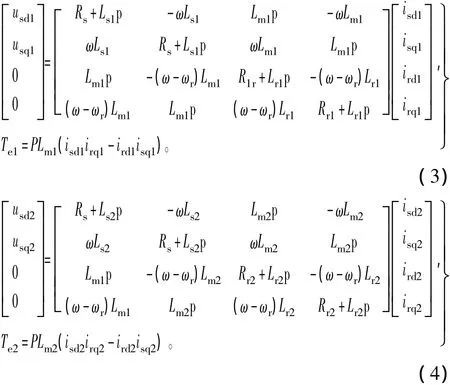
式中:p为微分算子;Ls1=Lm1+Ls01,Lr1=Lm1+Lr01,Ls2=Lm2+Ls02,Lr2=Lm2+Lr02;usd1、usq1和usd2、usq2分别为基波和2次谐波的定子电压的d、q分量;isd1、isq1、ird1、irq1和isd2、isq2、ird2、irq2分别为基波和2次谐波的定子电流和转子电流的d、q分量;Lm1、Ls01、Lr01和Lm2、Ls02、Lr02分别为基波和2次谐波的定子励磁电感、定子漏感和转子漏感;Rs定子电阻;Rr1、Rr2分别为基波和2次谐波折算后的转子电阻;ω、ωr分别为定子和转子的电角度;Te1、Te2分别为基波和2次谐波的电磁转矩,P为5相感应电机的极对数。
1.2 转子磁场定向矢量控制
本文的电子变极调速是在转子磁场定向矢量控制的基础上进行的,根据三相电机转子磁场定向矢量控制的相关理论,可以把三相扩展到五相,在转子磁场定向中忽略转子的漏磁链,将气隙磁链近似当作转子磁链,在求得d1-q1基波平面和d2-q2二次谐波平面的电压和电磁转矩后,就可以对5相感应电机进行转子磁场定向矢量控制。
图1是五相感应电机转子磁场定向矢量控制框图,其可以分别运行在1对极平面和2对极平面。控制框图中,可以选择开关1或2导通,使电机分别运行在d1-q1基波平面或d2-q2二次谐波平面。各个平面中,电流均被分解为转矩电流iq和励磁电流id,通过PI控制器后输出相应的电压uq和ud,经过坐标变换后输出至五相感应电机SPWM逆变器,以控制电机运行。
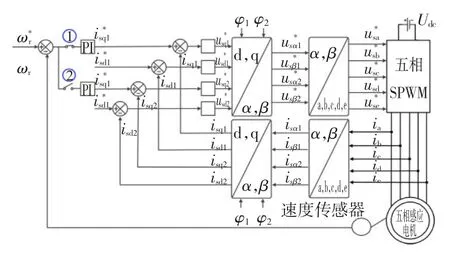
图1 双平面矢量控制框图Fig.1Double plane vector control diagram
图中,5相感应电机1对极和2对极矢量控制的正弦波脉宽调制(SPWM)数学表达式分别如式(5)和式(6)所示:

式中:Ts为SPWM的载波周期,M为调制比;[t1onat1onbt1onct1ondt1one]T,[t2onat2onbt2onct2ondt2one]T分别为1对极和2对极各相SPWM调制的开通时间。
2 转矩跟踪变极控制
2.1 电子变极基本原理
根据式(2)所示的5相感应电机其恒功率坐标变换矩阵Cs类推可知,当多相感应电机的相电流经过多相坐标变换后可以形成m个相互垂直解耦了d-q控制个平面,即具有m个控制自由度。在各自的解耦控制平面内和传统的三相感应电机一样可以进行转子磁链定向矢量控制。多相感应电机电子变极就是利用多相电机具有多个控制平面的特性,在一个控制平面内通过控制d-q电流生成对应极对数的旋转磁场,那么通过控制策略控制一种极对数的d-q电流向另外一种极对数的d-q电流转变,对应生成相应的旋转磁场,就实现了极对数的变换,达到了不停电情况下的变极调速,这是传统三相电机所不能实现的特性。
如5相感应电机有d1-q1和d2-q2两个相互正交的控制平面,这是电机具有两个控制自由度,在d1-q1平面内通过转子磁场定向矢量控制,控制基波isd1和isq1电流就形成1对极旋转磁场;在d2-q2平面通过矢量控制,控制二次谐波isd2和isq2电流就形成2对极旋转磁场。在不停电情况下,通过变极控制算法让isd1、isq1电流合理的向isd2、isq2电流转变,就可实现了5相感应电机1对极和2对极之间的变极调速,反之亦然。
2.2 转矩跟踪变极控制方法
如上文所述,在多相感应电机转子磁场定向矢量控制的基础上,变极控制技术要解决的主要问题是采用什么样的变极控制方法使多相电机在两种极对数之间切换时,过渡过程平稳一些,不让转矩和转速出现大的波动。本课题组曾采用电流控制的变极技术实现了变极调速[10-11],基本方法是在电机电子变极的过程中,通过阶跃响应的方式让电机的转矩电流isq1、isq2和励磁电流isd1、isd2直接切换,1对极向2对极变极的数学表达式如式(7)所示。

为了减小变极过渡过程中的转矩波动,除了在转矩电流的切换方式上探索更好控制策略外,我们可以直接针对电流的控制目标电磁转矩进行控制,基于这样的思路,本文在变极时直接对转矩进行闭环跟踪控制,通过转矩跟踪动态实时的控制转矩的变化,达到控制转矩稳定的目的,提高转矩的动态响应性能。
为了分析方便,根据式(3)和(4),五相感应电机在d1-q1基波平面和d2-q2二次谐波平面的电磁转矩表达式Te1、Te2可以重写为式(8),

控制目标是在变极过程中转矩稳定,设变极过渡过程中需要跟踪的负载电磁转矩为TeL,1对极和2对极相互变换的转矩跟踪表达式分别为式(9)和式(10)

式中k是1对极和二对极电磁转矩Te1、Te2相互转换的斜率。为了编程实现方便,式(9)和式(10)归一化表达式为式(11)

式中符号函数sgn(s)表达不同模式的电子变极状态,其表达式为式(12)

图2为五相感应电机转矩跟踪变极控制框图,图中通过转矩跟踪函数可分配转矩按式(11)将被跟踪的电磁转矩分解为Te1和Te2,电磁转矩Te1和Te2分别通过基波转矩控制和二次谐波转矩控制函数,再经过五相坐标变换,输出至五相SPWM,驱动五相感应电机运行。
由图可知,当5相感应电机在从1对极向2对极的变极时,通过控制d1-q1基波平面的电磁转矩Te1逐渐减小,控制d2-q2二次谐波平面的电磁转矩Te2逐渐增加,同时二者的大小满足负载电磁转矩为TeL的表达式(12),这样通过直接跟踪和控制电磁转矩的方式,就可以保证1对极向2对极的变极过程中的转矩稳定,反之亦然,整个变极过程转矩过渡平稳。

图2 电机转矩跟踪变极控制框图Fig.2Torque tracking control EPC diagram
3 实验结果及其分析
为了对提出的基于转矩控制的五相感应电机电子变极方法进行验证。设计了一套以32位浮点DSP TMS320F28335为控制核心的实验装置,实验装置的基本框图,如图3所示。

图35 相感应电机实验系统结构图Fig.3Five-phase IM experimental system
实验的五相感应电机的参数:额定功率3 kW,额定电压220 V,额定频率为50 Hz,极对数为1对;定子电阻为1.28 Ω,转子电阻为0.465 1 Ω;基波励磁电感为0.250 4 H,基波定子漏感为0.006 3 H,基波转子漏感为0.010 3 H;2次谐波励磁电感为0.064 4 H,2次谐波定子漏感为0.006 7 H,2次谐波转子漏感为0.007 9 H。
3.1 双平面矢量控制实验
图4为5相感应电机在矢量控制下转速为1 500 r/min,转矩10 N·m时,1对极模式运行的稳态相电流和转矩波形,其中图4(a)为单相相电流波形,图4(b)为转矩波形。

图4 1500 r/min时1对极电流与转矩Fig.41 500 r/min 1 pole pair mode current and torque
图5为5相感应电机在转速1 500 r/min,转矩10 N·m时,2对极模式运行的稳态相电流和转矩波形,其中图5(a)为单相相电流波形,图5(b)为转矩波形。
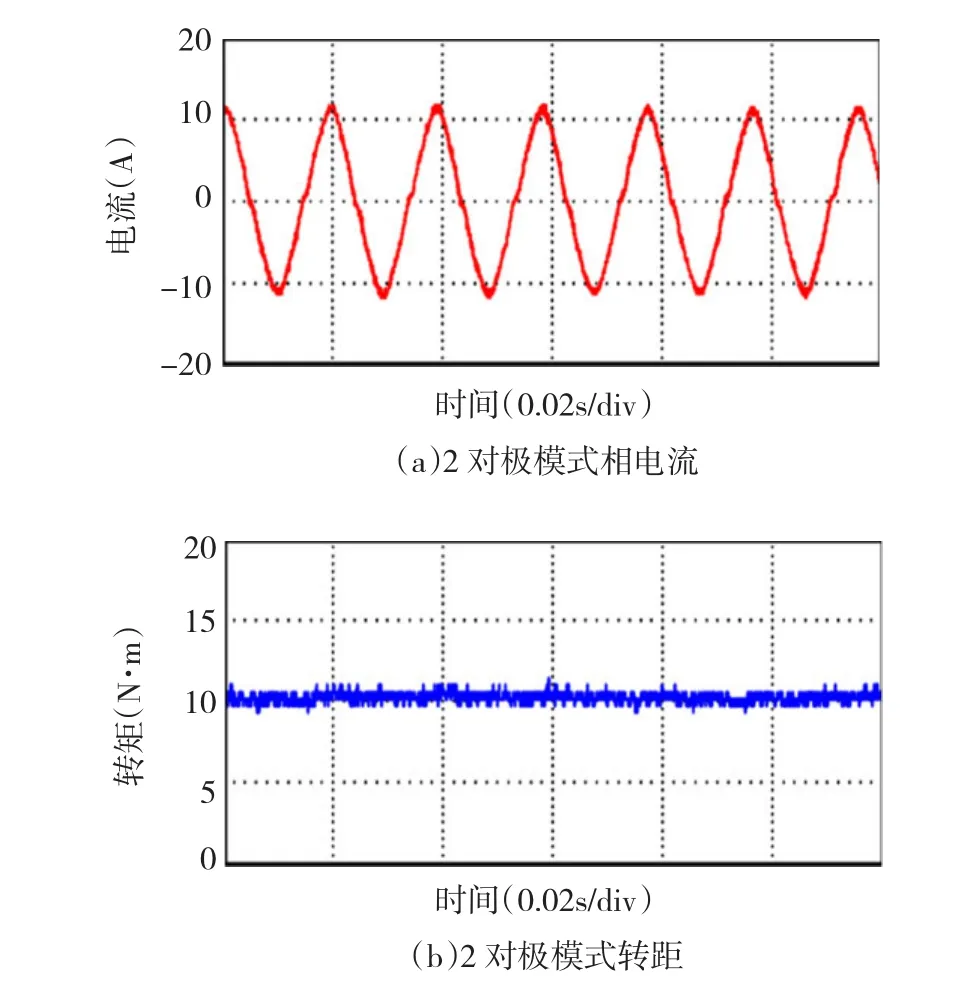
图5 1500 r/min时2对极电流与转矩Fig.51 500 r/min 2 pole pair mode current and torque
由图4和图5可见,2对极的相电流频率是1对极相电流频率的两倍,符合电机转速计算公式n=60×f/p的基本原理,说明该五相感应电机可以分别在1对极和2对极模式下稳定运行。由于篇幅限制,本文只叙述从2对极向1对极变极的情况,1对极向2对极变极的情况与此类似。
3.2 电流控制变极实验
图6~图9为采用电流控制电子变极技术时,5相感应电机从2对极向1对极变极过程中的电磁转矩、电机转速、a相相电流电流、相电流局部放大图和转矩电流的实验波形。实验中,给定电机转速为1 500 r/min,带负载10 N·m。
图6是5相感应电机从2对极向1对极进行电子变极的电磁转矩波形。从图中可见,在2对极向1对极的阶跃响应变极过程中转矩发生了很大的波动,电磁转矩从稳定运行时的10 N·m突降为5 N·m,随后迅速上升并有3 N·m左右的超调。这种变极方法不太理想。

图6 基于电流控制变极的转矩波形Fig.6Torque of current control based EPC
图7为电机的转速波形图。由图可知,变极过程中电机转速存在明显的下降,从稳定值1500 r/min迅速跌落至最小值约800 r/min,之后转速逐渐上升。

图7 基于电流控制的转速波形Fig.7Speed of current control based EPC
图8(a)为5相电感应电机a相相电流和转速波形,图8(b)为变极响应瞬间,a相相电流波形的局部放大图。从图中可以看到电流控制电子变极过程中相电流幅值先从稳定值11 A先减小至接近0 A,然后迅速上升,最大超调值约为16 A,最后电流幅值逐渐衰减接近初值。因为在电子变极过程中相电流幅值骤降,所以图6中电磁转矩会短时间内迅速跌落。

图8 基于电流控制变极的相电流及其局部放大波形Fig.8Current of current control based EPC
图9两平面转矩电流isq1和isq2的波形图,从图中可见变极开始时,二平面转矩电流isq2从初始值8 A瞬间跌落为0 A,而一平面转矩电流isq1迅速上升,且存在超调,最大值约为12.5 A,之后逐渐衰减,趋于稳定,在变极过程中存在某段时间两平面的转矩电流都接近于零,因此会出现电磁转矩的跌落。

图9 基于电流控制变极isq1,isq2电流波形Fig.9isq1,isq2of current control based EPC
3.3 转矩跟踪控制变极实验
图10~图13为采用转矩跟踪控制变极技术时,5相感应电机从2对极向1对极变极过程中的电磁转矩、电机转速、a相相电流、相电流局部放大图和转矩电流的实验波形。实验中,给定电机转速为1 500 r/min,带负载10 N·m。
图10是5相感应电机从2对极向1对极进行电子变极的电磁转矩波形。从图中可见,在2对极向1对极的阶跃响应变极过程中转矩没有发生跌落,只存在小幅度的超调,电磁转矩从稳定运行时的10 N·m,略微超调至12 N·m,随后逐渐下降接近初始值,约为9 N·m。可知,转矩跟踪控制变极方法对于电磁转矩有良好的控制性能。

图10 基于转矩控制变极的转矩波形Fig.10Torque of torque tracking control based EPC
图11是5相感应电机的转速波形。由图可知,电子变极过程中,电机的转速基本保持稳定,只有略微的下降,下降幅值不超过50 r/min。
图11 基于转矩控制变极的转速波形Fig.11Speed of torque tracking control based EPC
图12(a)为5相感应电机a相相电流波形,图12(b)为变极响应瞬间,a相相电流波形的局部放大图。从图中可以看到转矩跟踪控制电子变极过程中相电流幅值没有显著的跌落,而存在一定的超调,幅值最大值约为16A,之后逐渐衰减,接近初始值11A。因为在电子变极过程中相电流幅值没有显著跌落而且存在超调,所以图10中电磁转矩没有跌落而存在一定的超调,电子变极过程较为平稳。

图12 基于转矩控制变极的相电流及其局部放大波形Fig.12Current of torque tracking control based EPC
图13为两平面转矩电流isq1和isq2的波形图。从图中可见变极开始时,二平面转矩电流isq2从初始值7 A通过指数函数逐渐变为0 A。与此同时,一平面转矩电流isq1也通过指数函数逐渐增大到稳定值,约为8 A,增长过程中不存在超调。在变极过程中两平面的转矩电流同时变化,保证总电磁转矩接近稳定值,不存在电磁转矩的跌落。转矩和电流性能明显优于传统的电流控制变极方法。

图13 基于转矩控制变极isq1,isq2电流波形Fig.13isq1,isq2of torque tracking control based EPC
总之,由上述的实验结果可知,本文提出的转矩跟踪电子变极方法,能够实现5相感应电机在1对极和2对极之间相互变极。变极性能优于传统的电流控制变极,变极过程中不存在电磁转矩的跌落,其超调量也小,达到了理想的效果。
4 结论
变极调速技术是多相电机交流传动系统调速方法之一,是多相感应电机既变频调速技术的重要补充,本文通过对变极方法的研究得到如下结论:
1)不停电的电子变极技术是解决传统变极中转矩激剧下降的有效方法,但是如果变极方法采用的不合适也会带来转矩的下降,如本文中提到电流控制变极方法。
2)采用间接控制电流的方法,在有些工况下不如直接控制所关心的控制对象,本中提出的转矩跟踪变极方法就是基于这样的思路,该方法降低了变极过程中的电磁转矩波动,对电子变极技术的研究具有借鉴和参考价值。
3)文中侧重了对电子变极方法的研究,对变极过程中电磁转换的机理还没有涉及,这是不足之处,这也是本课题接下来要着重研究的方面。
[1]吴旭升,马伟明,孙俊忠,等.交直流混合供电的多相电机超瞬变电抗的测定[J].中国电机工程学报,2002,22(11):64-69.
WU Xusheng,MA Weiming,SUN Junzhong,et al.Measurement of subtransient reactances of multi-phase machines with AC and DC output[J].Proceedings of the CSEE,2002,22(11):64-69.
[2]LEVI E.Multiphase electric machines for variable speed applications[J].IEEE Trans on Industrial Electronics,2008,55(5): 1893-1909.
[3]欧阳红林,周马山,童调生.多相永磁同步电动机不对称运行的矢量控制[J].中国电机工程学报,2004,24(7):145-150.
OUYANG Honglin,ZHOU Mashan,TONG Tiaosheng.Vector control of multi-phase permanent magnet synchronous motor with asymmetric structure[J].Proceedings of the CSEE,2004,24 (7):145-150.
[4]张兰红,胡育文,黄文新.采用瞬时转矩控制策略的异步发电系统的容错研究[J].航空学报,2005,26(5):567-573.
ZHANG Lanhong,HU Yuwen,HUANG Wenxin.Tolerant research of the induction generation system based on ITC strategy[J].Acta Aeronautica ET Astronautica Sinica,2005,26(5): 567-573.
[5]BIANCHI N,BOLOGNANI,S,PRE M D.Strategies for the fault-tolerant current control of a five-phase permanent-magnet motor[J].IEEE Trans on Industry Applications,2007,43(4): 960-970.
[6]顾春雷,胡育文.基于极-相调制绕组的多相异步电动机/发电机设计[J].电工技术学报,2006,21(5):14-18.
GU Chunlei,HU Yuwen.Design of multi-phase induction motor/generator with pole-phase modulation winding[J].Transactions of China Electrotechnical Society,2006,21(5):14-18.
[7]JIANG S Z,CHAU K T,CHAN C C.Spectral analysis of a new six-phase pole-changing induction motor drive for electric vehicles[J].IEEE Trans on Industrial Electronics,2003,50(1):123-131.
[8]钱罗奋.一种新的交流电机换相变极法-2/3变极[J].中国电机工程学报,2004,24(3):120-125.
QIAN Luofen.A new commutating method for change pole to electric machine-2/3-change-pole[J].Proceedings of the CSEE,2004,24(3):120-125.
[9]OSAMA M,LIPO T A.A new inverter control scheme for induction motor drives requiring wide speed range[J].IEEE Trans on Industry Applications,1996,32(4):938-944.
[10]杨家强,黄进,康敏.多相感应电机的电子变极技术[J].电机与控制学报,2009,13(3):322-326.
YANG Jiaqiang,HUANG Jin,KANG Min.Electronic pole change technique of multi-phase induction motor[J].Electric Machines and Control,2009,13(3):322-326.
[11]杨家强,高健,黄进.多相感应电机指数响应电子变极方法研究.中国电机工程学报,2013,33(27):105-111.
YANG Jiaqiang,GAO Jian,HUANG jin.Electronic pole-changing methods of multiphase induction motor based on exponent response[J].Proceedings of the CSEE,2013,33(27):105-111.
[12]HUANG Jin,KANG Min,YANG Jiaqiang.Analysis of a new 5-phase bearingless induction motor[J].Journal of Zhejiang U-niversity Science A,2007,8(8):1311-1319.
(编辑:张诗阁)
Electronic pole-changing methods of five-phase induction machine based on torque tracking
YIN Rong-sen1,YANG Lei1,YANG Jia-qiang1,HUANG Jin1,WANG Ting1,LI Ye1,XU Jian-hua2
(1.College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China; 2.Jiangyin Zhenjiang Steel Structure Co.,Ltd.,Jiangyin 214400,China)
To resolve the torque drop and speed fluctuation problem of five-phase induction machine(IM) during the process of electronic pole-change(EPC)when adopting the traditional EPC control method,the electronic pole-changing methods of five-phase induction machine based on torque tracking was proposed.Different plane harmonic currents generated by the rotor field oriented vector control(RFOVC) can make motor rotate smoothly without power off to realize EPC.The proposed method was verified by an EPC experiment of a 5-phase induction machine and the experimental results of EPC between 1-pair poles and 2-pair poles based on RFOVC were given.The experimental results of double planes vector control,current control based EPC and torque tracking control based EPC show that the method proposed is feasible to achieve smooth pole-changing without power off by reducing torque and speed fluctuations.
multiphase induction machine;torque tracking control;electronic pole-changing;vector control;torque ripple
10.15938/j.emc.2015.01.001
TM 359.3
A
1007-449X(2015)01-0001-07
2014-05-08
国家自然科学基金(51177150);国家重点基础研究发展计划(973计划)(2013CB035604);航空科学基金(2013ZB76004);浙江省自然科学基金(LY14E070004)
尹溶森(1992—),男,博士研究生,研究方向为多相电机控制系统;
杨磊(1993—),男,本科,研究方向为电机及其控制;
杨家强(1970—),男,博士,副教授,研究方向为电机及其控制;
黄进(1960—),男,博士,教授,博士生导师,研究方向为电机及其控制、状态检测与故障诊断;王亭(1989—),女,硕士研究生,研究方向为电机控制;李烨(1993—),男,硕士研究生,研究方向为电机控制;徐建华(1965—),男,本科,高级工程师,研究方向为多相电机控制。
杨家强
