变步长精细Runge-Kutta法非等温输气管道泄漏检测与定位
2015-06-26王丽娜高宪文刘潭
王丽娜,高宪文,刘潭
(东北大学信息科学与工程学院,辽宁沈阳110819)
变步长精细Runge-Kutta法非等温输气管道泄漏检测与定位
王丽娜,高宪文,刘潭
(东北大学信息科学与工程学院,辽宁沈阳110819)
针对复杂工况下输气管道的泄漏检测与定位准确率低、效率不高这一难题,结合等温定位法和Runge-Kutta法(龙格-库塔法)的原理及优缺点提出改进的变步长精细Runge-Kutta法。根据管道中的气体流动过程及温度的不同处理方式,以管道的温度、压力和流速为参数确定步长求得管道从首端到末端各截面的参数,通过测量管道首末端的流量和压力可判定出输气管道泄漏的位置。通过对非等温气体管道的仿真实验,以泄漏率和定位精度作为评价指标,对等温定位法和变步长精细Runge-Kutta法定位效果进行了对比分析。仿真结果表明,对于非等温气体管道的泄漏,变步长精细Runge-Kutta法的检测与定位精度准效率高。
输气管道;非等温;泄漏检测与定位;精细Runge-Kutta法;变步长
0 引言
输气管道的泄漏检测与定位技术是管道安全运行的重要保障,目前已有多种管道泄漏检测与定位方法,但受管道周围温度、压力、流量、流速、管壁粗糙程度等复杂工况的影响,各种检测方法[1-5]在精度和效率上都有其局限性。且输气管道由于管内气体受温度和可压缩性的影响更大,相比输油管道泄漏检测与定位操作起来更为复杂。
本文根据输气管道周围温度的变化,针对温度的不同处理方式分别提出了输气管道泄漏定位的等温定位法和变步长精细Runge-Kutta法,分别应用于等温及非等温输气管道的泄漏检测与定位,并通过现场实际管道的验证及仿真对比研究对这两种方法的实际效果进行了相关研究和分析。
1 输气管道模型
依据质量、动量及能量守恒建立气体的稳态管流方程为:

其中,x是管道的轴向长度,m;ρ是气体密度,kg/m3;u是气体流速,m/s;s是管道截面积,m2,且假设整个管道的横截面积是不变的;P为压力,Pa;λ是水力摩阻系数;d是管道内径,m;H为焓,J/kg;K是传热系数,W/m2K;t是气体温度,t0是土壤温度,K。
结合气体状态方程:

2.2 变步长精细Runge-Kutta法
等温定位法依据泄漏后管道两端的流量和压力变化即可判定泄漏位置,计算简单,实施方便。但需采用平均温度进行计算,对于非等温管道计算时会产生一定的计算误差。由于管道沿程长,地理跨度大,温度差异明显等生产实际情况决定了绝大多数输气管道都是非等温管道。另外,由于输气管道内介质成分复杂,对气体密度、压缩系数等气体特性估算不准时对输气管道泄漏位置判定亦会造成偏差。
因此对于非等温气体管道,需采用精度较高的四阶Runge-Kutta法[6],把管道分成N段,设每段管道长度为Δx,根据管道的温度、压力和流速等参数以Δx为步长可求得管道从首端到末端各截面的参数。显而易见,管段长度Δx的大小决定了定位精度。Δx越大,计算速度越快,但定位精度越低;Δx越小,计算速度越慢,但定位精度越高。由此本文提
即可得到管道沿线压力、流量和温度的分布情况。
2 输气管道泄漏检测与定位算法
2.1 等温定位法
等温定位法将管道中的气体流动过程视为等温过程,沿管长对式(1)和式(2)进行积分,得

其中,Pi是管道入口压力;Po是管道出口压力;G是管道中气体的质量流速,G=ρu,kg/m2s;珔Z是管道内气体平均压缩系数;r是气体常数,KJ/kg;珔λ是管道平均摩阻系数,可通过测出管道首末端压力和流量后,通过式(5)得到;l是管道长度。
管道泄漏示意图如图1所示。

图1 管道泄漏示意图Fig.1Schematicrepresentationsforleakingpipeline
令泄漏点上游管段的质量流速为G1,下游管段的质量流速为G2,管道首端压力为Pi,末端压力为Po,泄漏点处的压力为Pl,则
综上所述,盐酸右美托咪定进行全脑缺血前预处理,结果为Dex预处理组与Ns组的脑含水量差异有统计学意义,且Dex预处理组脑含水量平均值明显低于sham组和Ns组,该结果可说明盐酸右美托咪定预处理可以减轻大鼠全脑缺血再灌注损伤脑水肿的程度,对大鼠有一定的脑保护作用,可通过降低脑含水量水平,对脑缺血再灌注损伤起保护作用。


其中,lr是泄漏点处距离管道首端的距离;G1和G2分别为管道上游和下游管段的质量流速。由式(6)和式(7)可得出变步长的Runge-Kutta法进行泄漏定位,即首先选取大的计算步长,在整个管长范围内进行泄漏位置的初选,然后逐步缩小泄漏定位的搜索范围并逐步递减计算步长,直到最终满足泄漏定位精度的需要。计算流程图如图2所示。

图2 变步长龙格-库塔法计算流程图Fig.2Procedureofvariable-stepRunge-Kuttamethod
其中初始步长在选取时要保证Runge-Kutta法计算的收敛性,为了保证计算精度,步长不能一下选的过长,可逐步调整。管道泄漏位置如图3所示,在求解曲线b时将摩擦阻力项和热损失项进行调整,使得从管道末端向管道首端进行求解,则式(2)和式(3)可调整为式(10)和式(11):

这里在四阶Runge-Kutta法的基础上采用精细Runge-Kutta法[7]计算,它结合了精细积分法和Runge-Kutta法的优点,不仅仅是将Runge-Kutta法的公式移植到特解的数值积分中,而且利用Runge-Kutta法的几何含义对数值积分点处未知状态参量进行预估,从而可以得到精度更高的精细Runge-Kutta法。采用精细Runge-Kutta法计算的步骤是:首先以K1为斜率,从第一积分点出发,前进半个步长,得到第二积分点处未知量的预估值及近似值K2;然后以K2为斜率,从第一积分点出发,前进半个步长,重新计算出第二积分点处未知量的预估值及近似值,并以(K2+)/2作为函数在第二积分点处的平均值;最后,以K2为斜率,从第一积分点出发,前进一个步长,计算出第三积分点未知量的预估值,以此类推。
泄漏前后管道压力分布如图3所示,其中曲线a和曲线b分别为泄漏前后管道压力梯度曲线。当没有发生泄漏时,压力梯度曲线是光滑的,当泄漏发生后,管道的压力梯度曲线在泄漏点处出现拐点。分别按照管道首端和末端条件下的温度、压力和流速等参数求解压力梯度曲线a和b,则交点的位置即为管道泄漏点。

图3 管道泄漏位置示意图Fig.3Schematicrepresentationforleaklocation
3 仿真验证
采用某油田的一段输气管道,管道长度为286.3km,管径为361mm,介质中主要成分为CH4,其他成分有C2H6、C3H8、CO2、H2S等。在管道首端a站出口管线放气模拟泄漏,泄漏通过泄漏点处的球阀打开实现,在b站进口采集信号,布置图如下图4所示:由于放气与信号采集的同步性存在不确定性,因此先打开阀门放气,放气持续一段时间,然后再关闭阀门。

图4 实际管道验证布置图Fig.4Theactualpipelinevalidationplan
图5~图7为泄漏时管道两端压力和流量的变化曲线,可看出泄漏时,在22~30s的时间段内,管道两端参数变化剧烈,而30s后变化趋于缓慢,管道泄漏时的参数变化经历了稳态-快瞬态-慢瞬态-稳态的过程,即是从一种恒定流状态经过瞬变流过程时,管道泄漏后的参数基本稳定。
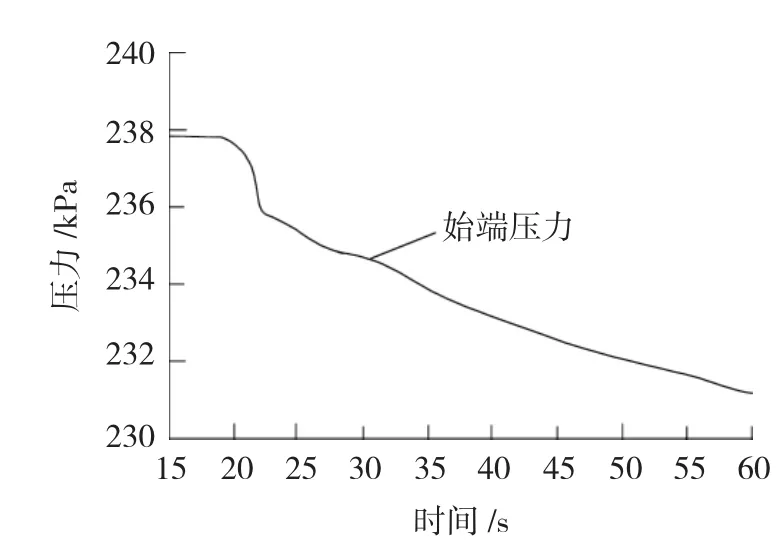
图5 泄漏前后管道始端压力变化曲线Fig.5Variationofthepressurebeforeandafterleakage

图6 泄漏前后管道末端压力变化曲线Fig.6Variationofthepressurebeforeandafterleakage

图7 泄漏前后管道两端流量变化曲线Fig.7Variationofflowrateatbothends beforeandafterleakage
仿真结果表明,在现场实验工况下,需恒定流状态经过瞬变流过程时,管道泄漏后的参数基本稳定,这时泄漏定位算法才能取得良好的定位效果。同时需注意阀门开启时间,泄漏阀门开启速度不能太慢,考虑到现场工况及阀门操作将阀门开启时间初步定为0.3。对于等温气体管道的泄漏点l1和l2,分别采用等温定位法和变步长精细Runge-Kutta法计算泄漏位置,其中泄漏率即孔口处的气体泄漏取决于孔径与管径之比,可以是临界流等熵运动或亚临界流运动,这里采用Jo和Ahn[8]提出的估计高压气体管线泄漏率的简单模型计算泄漏率,如式(11)所示:
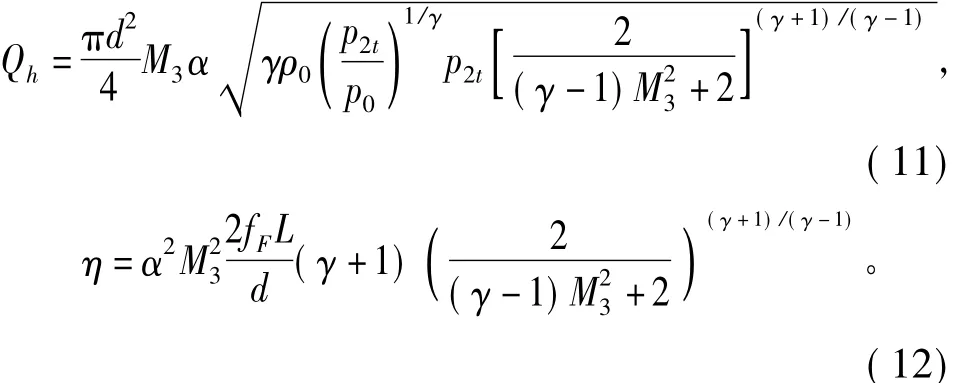
式中:Q为质量流量率,kg/s;Mx是气体摩尔质量,g/mol;γ为热容比;L为管道长度,m;d是管道直径,m;η是定义的参数。
泄漏位置为泄漏点距离管道首端的距离,对比结果如表1所示。
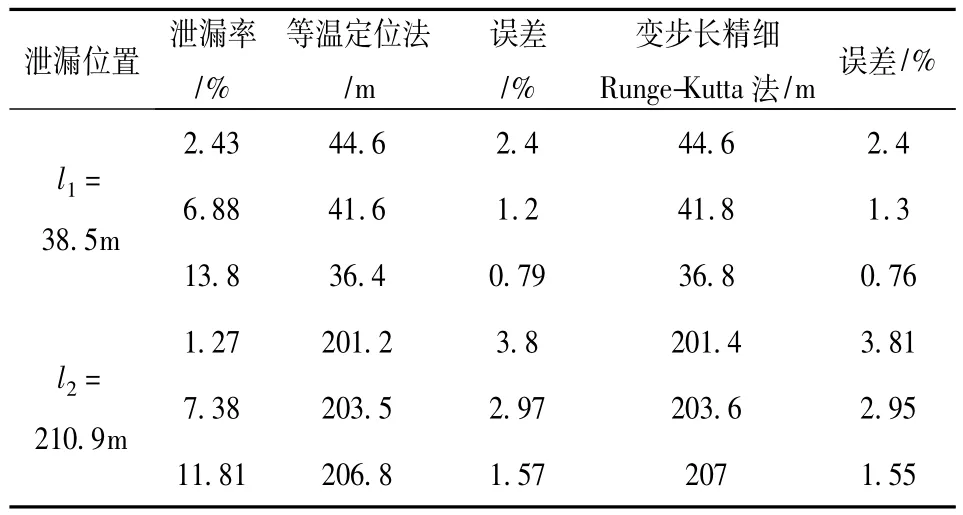
表1 泄漏定位结果对比分析Table1Comparisonandanalysisofleaklocationresults
由表中可看出,在小泄漏时两种算法定位误差较大,大泄漏时两种算法定位误差较小。对于等温气体管道来说,两种算法都可以较准确的进行定位,但变步长精细龙格-库塔法计算量比等温定位法大,对管道两端气体质量流量的估算采用BWRS状态方程[9-10],BWRS是1970年由StarlingKE等人在BWR方程基础上提出的一个具有11个常数的状态方程,其目的是拓宽BWR方程的应用范围,其形式为:

式中:p表示系统的压力,kPa;T表示系统的温度,K;ρ表示气体或液体的密度,kmol/m;R表示气体常数,R=8.3143,KJ/(mol·K)。为了扩大应用范围及提高在高压、低温下的精确度,对管道两端气体质量流量的估算采用BWRS状态方程。
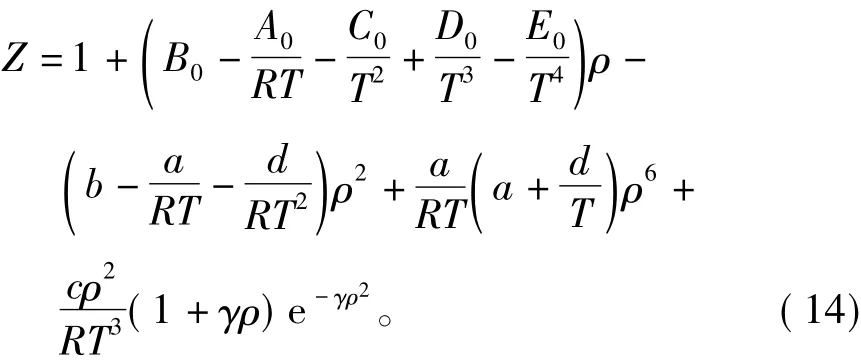
变步长精细Runge-Kutta法中首、末两端的平均压缩系数的计算也采用BWRS状态方程,压缩系数是对理想气体状态方程引入的一个修正系数,用Z表示,它表示实际气体与理想气体的偏离程度,计算公式如下:
泄漏定位误差对比如表2所示。

表2 泄漏定位误差对比分析Table2Comparisonofleaklocationdeviation
由表2中所见,变步长精细Runge-Kutta法对管道气体特性估算准确,定位精度较高,定位误差小
于等温定位法。为考察管道首、末两端温差变化对定位精度的影响,提高输气管道首、末两端的温度,保持管道周围土壤温度不变,使得管道首、末两端的温差增大,然后分别采用等温定位法及变步长精细Runge-Kutta法对泄漏进行定位,定位结果如表3所示。
由表3中可看出,当管道首、末两端温差变化增大时,两种算法定位误差均增大,但变步长Runge-Kutta法的定位误差比等温定位法要小一些,定位位置更接近于泄漏位置。因此变步长精细Runge-Kutta法更适用于非等温气体管道的泄漏检测和定位。

表3 首、末两端温差变化增大时对定位精度的影响Table3Effectoftemperaturedifferencebetween bothendsonleaklocationresult
4 结论
本文针对输气管道的泄漏检测与定位这一难题,根据管道周围温度的不同处理方式,分别提出了等温定位法及变步长Runge-Kutta法。本文采用变步长精细Runge-Kutta法,该方法结合了精细积分法和Runge-Kutta法的优点,在精度和效率上均有较大程度的提高。仿真研究结果表明,对于等温气体管道,两种定位方法精度基本相当。对于非等温气体管道,变步长精细Runge-Kutta法定位精度明显优于等温定位法,更为重要的是该法受管道两端温差变化的影响较小,因此更适用于非等温气体管道的泄漏检测与定位。
[1]孟令雅.基于瞬态模型法的输气管道泄漏监测与定位技术[J].北京交通大学学报,2008(3):73-77.
MENGLingya.Researchonleakdetectionandpositionfornatural gaspipelinebasedontransientmodelmethod[J].JournalofBeijingJiaotongUniversity,2008(3):73-77.
[2]PENGXuelin,HAOHong,LIZhongxian.Applicationofwavelet packettransforminsubseapipelinebeddingconditionassessment[J].EngineeringStructures,2012,39:50-65.
[3]YANGJ,WENYM,LIP.Leaklocationusingblindsystemidentificationinwaterdistributionpipelines[J].JorunalofSound andVibration,2008,310(1/2):134-148.
[4]HUJinqiu,ZHANGLaibin,LIANGWei.Detectionofsmallleakagefromlongtransportationpipelinewithcomplexnoise[J].JournalofLossPreventionintheProcessIndustries,2011,24(4):449-457.
[5]LEIGHTONTG,WHITEPR.Quantificationofunderseagas leaksfromcarboncaptureandstoragefacilities,frompipelines andfrommethaneseeps,bytheiracousticemissions[J].ProceedingsoftheRoyalSocietyaMathematicPhysicalandEngineeringSciences,2011,468(2138):485-510.
[6]周焕银,刘开周,封锡盛.基于神经网络的自主水下机器人动态反馈控制[J].电机与控制学报,2011,15(7):87-93.
ZHOUHuanyin,LIUKaizhou,FENGXisheng.DynamicfeedbackcontrolbasedonANNcompensationcontrollerforAUVmotions[J].ElectricMachinesandControl,2011,15(7):87-93.
[7]马有理,赵丽丽.长输油气管道裂纹初始扩展特性[J].哈尔滨工程大学学报,2014,35(4):426-431.MAYouli,ZHAO
Lili.Theinitialgrowthcharacteristicsofacrackexistinginalong oil-gaspipeline[J].JournalofHarbinEngineeringUniversity,2014,35(4):426-431.
[8]JOYD,AHNBJ.Asimplemodelforthereleaserateofhazardousgasfromaholeonhigh-pressurepipelines[J].JournalofHazardousMaterials,2003(A97):31-46.
[9]孙良,王建林.基于稳态模型的气体管道泄漏定位方法的研究[J].仪器仪表学报,2010,31(3):555-570.
SUNLiang,WANGJianlin.Researchonthemethodforleaklocationingaspipelinebasedonsteady-statemodel[J].Chinese JournalofScientificInstrument,2010,31(3):555-570.
[10]LOPESDOSSANTOSP,RAMOSJA,MARTINSDECARVALHOJ.Identificationoflinearparametervaryingsystemsusingan iterativedeterministic-stochasticsubspaceapproach[J].2007 EuropeanControlConference,July2-5,2007,Kos,Greece.2007:4867-4873.
(编辑:张诗阁)
Non-isothermalgaspipelineleakdetectionandlocalizationalgorithm basedonvariablestep-sizepreciseRunge-Kuttamethod
WANGLi-na,GAOXian-wen,LIUTan
(CollegeofInformationScienceandEngineering,NortheasternUniversity,Shenyang110819,China)
Totheproblemofgaspipelineleakdetectionandlocation,combiningtheadvantagesanddisadvantagesofisothermallocalizationmethodandRunge-Kuttamethod,accordingtothedifferenttreatmentmethodsofthetemperature,isothermallocalizationmethodandvariablesteppreciseRunge-Kutta methodwerecomparedandanalyzed.Throughsimulationexperimentsofnon-isothermalgaspipeline,leakagerateandpositioningaccuracyastheevaluationindexs,locatingfunctionofthetwomethodswere comparedandanalyzed.Verificationoffieldactualpipelinewasconductedandsimulationresultsshow thatfornon-isothermalgaspipelinethepositioningeffectofvariablestep-sizepreciseRunge-Kuttamethodisbetterthantheisothermallocalizationmethod.
gaspipeline;non-isothermal;leakdetectionandlocalization;preciseRunge-Kuttamethod; variablestep-size
10.15938/j.emc.2015.01.016
TP273
A
1007-449X(2015)01-0107-06
2014-03-24
国家自然科学基金(61034005)
王丽娜(1985—),女,博士研究生,研究方向为输气管道泄漏诊断与定位;高宪文(1954—),男,博士,教授,博士生导师,研究方向为复杂工业过程建模、控制与优化、网络控制系统理论及应用、智能控制理论及应用;
刘潭(1985—),男,博士研究生,研究方向为采油过程综合自动化系统。
王丽娜
