基于XC2365和模糊算法的车辆ESP系统研究与设计
2015-02-21王爱军新乡职业技术学院电子信息系河南新乡453000
王爱军,孙 明(新乡职业技术学院电子信息系,河南新乡453000)
基于XC2365和模糊算法的车辆ESP系统研究与设计
王爱军*,孙明
(新乡职业技术学院电子信息系,河南新乡453000)
摘要:设计了基于模糊控制算法技术和微控制器XC2365的车辆电子稳定系统ESP(Electronic Stability Program)。该系统通过传感器收集车辆的行驶状态数据,并将系统送至微控制器XC2365,控制器根据模糊算法进行车辆行驶辅助控制。整个系统通过MATLAB软件仿真,满足ESP控制策略要求。通过实地实验结果表明该系统安全性强,能够适应各种路况要求,保证车辆在行驶过程的稳定性和驾驶员的人身安全。
关键词:车辆电子稳定系统;微控制器; MATLAB;模糊控制
随着汽车普及率的逐年提高,人们对汽车安全性的标准逐渐提高,因此车内的安全系统功能不断完善。在车内安全系统领域中汽车稳定系统ESP(Electronic Stability Program)是一个重要的发展方向。ESP系统通过车内的多种传感器对车辆进行实时监控,将实时数据发给ECU进行分析计算,识别驾驶员的驾驶意图,对可能出现的危险形式作出辅助控制,从而保证车辆的架势稳定性。有数据显示,安装ESP系统的车辆的交通事故率下降了21%~51%。因此ESP系统得到了广泛的认可[1-2]。
国内配备ESP系统的车辆仅占19%,远低于欧美国家的75%的装配率,主要国内汽车动力学研究较晚。本文将ESP系统的原理与电子、自动化多专业相结合,设计了车辆ESP系统[3-5]。
1 系统的总体设计
ESP系统主要是在路面湿滑、转弯、高速躲避障碍物的情况下对车辆行驶时的转向不足、甩尾等危险状态及时作出修正和辅助控制。
整个ESP系统如图1所示,由传感器模块、制动单元和控制器模块构成。结合图1,整个系统的硬件结构如图2所示。

图1 ESP系统结构图
ESP系统对方向盘转角传感器和4路车辆轮速传感器的信号进行计算分析,得到车辆实时的稳定状态和方向信息。横摆角速度传感器和横向加速度信号传至主控制器后,主控制器会进行计算并和先前得到的车辆稳定状态信息、方向信息做对比。经过对比,两者数据信息对应一致,则ESP系统可以确定车辆处于安全驾驶状态;若不一致,则车辆处于转向不足和甩尾的危险驾驶状态;此时ESP系统中的主控制器会发出控制命令到电磁阀单元,对车轮进行制动或加速,来纠正车辆的危险驾驶状态。
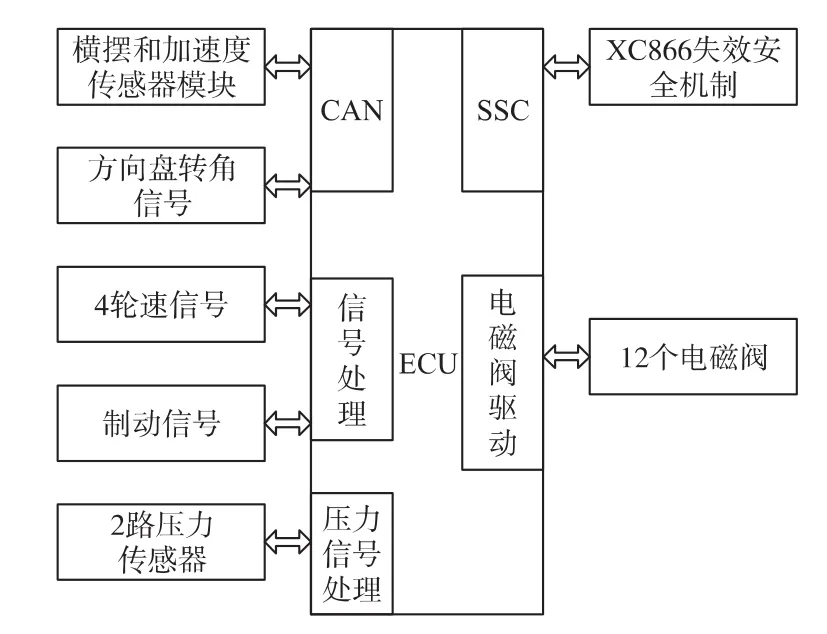
图2 ESP系统硬件结构图
2 系统硬件设计
ESP系统的主控制器采用英飞凌公司的XC2365,XC2365内部集成了同步串行控制器(SSC)接口。XC2365通过SSC接口与从控制器相连接,实现数据通信。从控制器采用的是英飞凌公司的XC866芯片。从控制器根据主控制器发送的信息判断各个传感器信号和主控制器工作状态是否正常。从控制器会在主控制器发生故障时,会接管整个ESP系统的控制器优先权。
2.1 CAN总线网络模块电路设计
XC2365集成了CAN控制器,需要配合CAN总线收发器TLE6251GS实现连接到整个车辆的CAN总线网络上。CAN总线通信硬件电路图如图3所示。横摆角速度和加速度的实时数据通过CAN总线网络传送至主控制器XC2365。
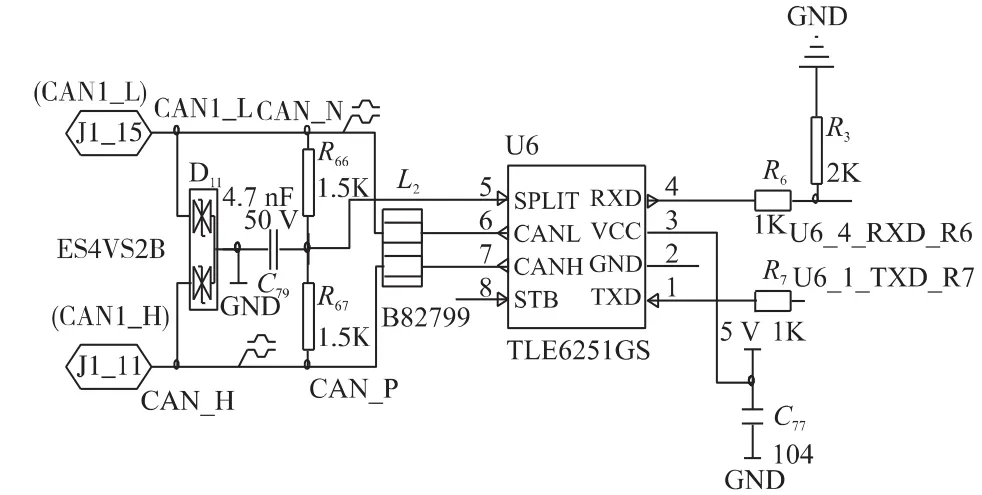
图3 CAN总线通信模块电路原理图
2.2传感器模块电路设计
横摆角速度传感器采用AD公司的陀螺仪ADXRS62X,电路图如图4所示。陀螺仪内部集成了角速率传感器和信号调理电路,输出信号为模拟信号,且与参考电压成比例。车辆的横摆角速度是为了说明车辆在垂直方向的偏转程度,偏转程度代表着汽车安全行驶的稳定程度。
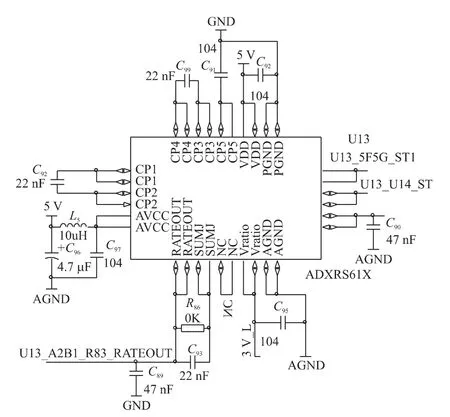
图4 横摆角速度传感器电路原理图
车辆水平方向加速度信号(X轴和Y轴)的测量主要是使用AD公司的加速度计ADXL203,电路原理图如图5所示。4路轮速信号的采集主要是使用霍尔传感器,霍尔传感器输出的信号首先需要经过滤波电路,滤去高频的干扰信号。再经过信号调理电路比较、整形成方波信号,最后送至主控制器XC2365。

图5 加速度传感器硬件电路原理图
2.3系统电源供电设计
整个ESP系统的硬件电路部分需要12 V直流电供电。供电电源采用车辆的电平供电,由于ESP系统需要稳定的直流供电,所以采用英飞凌公司的TLE4254GA电源转换芯片,该芯片的输入电压范围是4 V~45 V,电路原理图如图6所示。
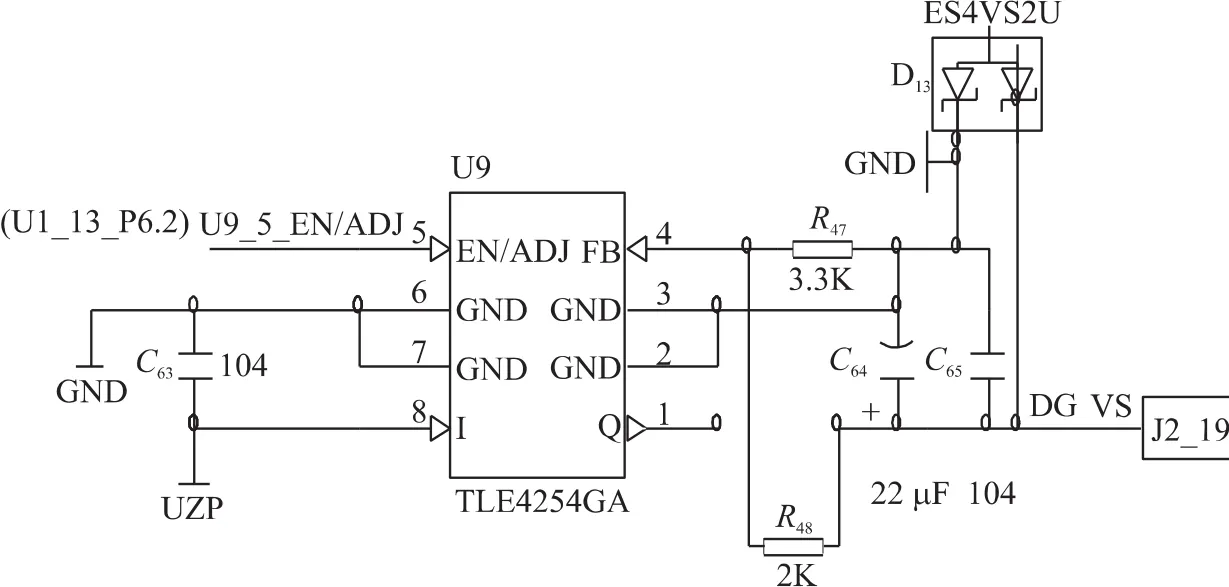
图6 电源模块电路原理图
2.4执行机构设计
车辆处于危险状态下,ESP系统会对执行机构中的电磁阀发出控制命令,对车辆的特定车轮施加制动力或增加动力。针对电磁阀的驱动主要采用英飞凌公司的TLE6228芯片,以此实现电磁阀的增压或减压。
3 模糊控制器设计
在进行ESP控制算法设计方面,本设计将整个车辆作为一个整体,看作是二自由度的模型。车辆的行驶方向为X轴,侧向运动方向为Y轴,车辆运行平面的垂直方向为Z轴。二自由度分别是Y轴和Z轴。车辆的稳定性稳定可以基于二自由度模型,简化为侧向和横摆运动方向的模型。
横摆运动方向的信号可以通过横摆角速度传感器ADXRS62X测量得到,而在侧向方向的信号为质心侧偏角。质心侧偏角通过二自由度车辆运动微分方程得到:

式中: m为车辆质量; u为轮速;为后轮侧偏刚度; l为车辆轴距; a为质心到前轴的距离; b为质心到后轴的距离[6-7]。
3.1输入量的获取和输出量
控制算法采用模糊控制,模糊控制器的输入量选择理论中理想质心侧偏角和实际质心侧偏角的差值为E,以及它们差值的变化率EC。车辆的ESP系统在辅助控制时依靠4个车轮的制动力,因此模糊控制器的输出量选为车轮制动力的横摆力矩M。模糊控制器结构原理如图7所示。
3.2模糊控制策略
(1)模糊化:为了保证ESP控制的精度,模糊控制器的2个输入量和1个输出量都定义了5个语言变量:“负大(NB)”、“负中(NS)”、“零(Z)”、“正小(PS)”、“正大(PB)”。输入量E的论域设置为[-1,1]; EC的论域[-0.5,+ 0.5];输出量M的论域[-1,1]。
(2)模糊推理:根据输入输出之间的经验关系,采用”IF-THEN”语句得到模糊逻辑控制规则如表1所示。
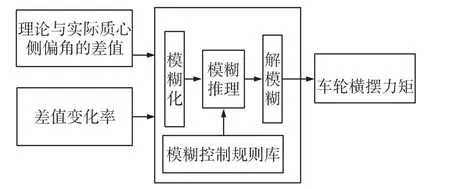
图7 模糊控制器结构图
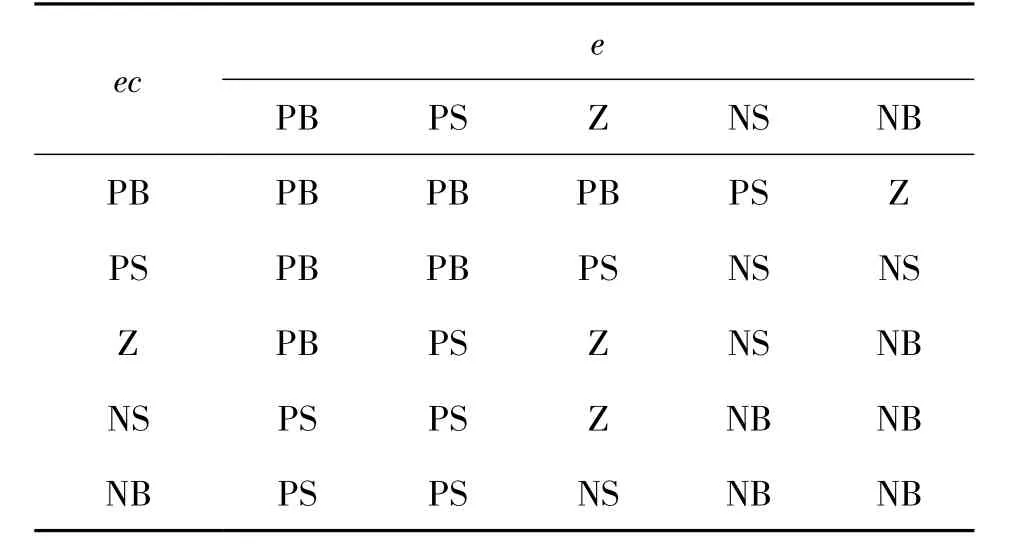
表1 横摆力矩推理规则
(3)解模糊: E的量化因子KE=1,EC的量化因子KEC=0.19,M的量化因子为K= 4 900根据模糊推理规则所得结果乘以量化因子,即可得到车轮制动力所产生的横摆力矩输出值。
模糊控制器通过在MATLAB软件中的,应用Fuzzy工具箱实现。
4 系统验证
本系统在黑河冬季汽车试验场进行了初步试验,以某型号汽车为研究对象,该车辆参数:整车质量2 326 kg;横摆转动惯量4 133 kg·m·m;轮距1.5 m;轴距3.027 m;质心高度0.55 m;前轮总侧偏刚度-41 000 N·rad;后轮总侧偏刚度-47 000 N·rad;试验车辆安装硬件在环数据采集测试系统。试验环境如图8所示,通过数据采集测试系统收集到的数据分析车辆具有良好的稳定性。

图8 试验环境结构图
5 结论
本文主要针对目前ESP系统技术的研究,将模糊控制和MCU等技术应用于车辆安全系统的研究。ESP系统工作电压范围9 V~16 V;工作温度-40℃~125℃;整个系统采用双芯片框架设计,满足失效安全机制;可以实现与ABS、TCS系统功能的无缝结合。本系统适用于各种路面,稳定可靠,鲁棒形强。
参考文献:
[1]欧健,房占鹏,王林峰,等.基于ESP系统模型和模糊控制仿真[J].重庆邮电大学学报,2010,8,22(4) : 516-519.
[2]李宏梅,佟为明,程树康,等.CAN总线全数字式汽车仪表[J].电子器件,2010,33(5) : 646-649.
[3]李松炎,闵永军,王良模,等.基于模糊控制的汽车ESP系统仿真研究[J].拖拉机与农用运输车,2009,36(6) : 51-55.
[4]王振臣,程菊,张聪,等.基于模糊控制的汽车ESP控制系统仿真[J].模糊系统与数学,2013,27(5) : 88-89.
[5]陈家琪,王伟哲,高超,等.ESP系统实验平台的研发[J].计算机工程与应用,2009,45(19) : 72-74.
[6]马春卉.汽车ESP系统的建模和控制方法[J].南京理工大学学报(自然科学版),2010,34(1) : 108-112.
[7]王媛媛.ESP系统的制动力分配控制策略优化[D].长春:吉林大学,2011: 15-18.

王爱军(1968-),男,山东济阳人,高级实习指导教师,新乡职业技术学院电子信息系,主要研究方向为电子设计与芯片级维修技术,79046248@ qq.com。
收稿日期:2014-04-23修改日期: 2014-05-16
中图分类号:TP273.4
文献标识码:A
文章编号:1005-9490(2015) 02-0469-04
