卫星/惯性组合定位系统中的数据采集单元设计
2015-02-21杨宗霖姚速瑞张浩峰南京理工大学计算机学院南京0094南京理工大学机械工程学院南京0094
杨宗霖,姚速瑞,张浩峰*(.南京理工大学计算机学院,南京0094; .南京理工大学机械工程学院,南京0094)
卫星/惯性组合定位系统中的数据采集单元设计
杨宗霖1,姚速瑞2,张浩峰1*
(1.南京理工大学计算机学院,南京210094; 2.南京理工大学机械工程学院,南京210094)
摘要:介绍了一种卫星/惯性组合导航系统中的数据采集单元的设计过程及其测试结果。系统以低功耗单片机MSP430为控制器,并通过18 bit 8通道同步数据采集芯片AD7609采集三通道加速度计输出,通过串口扩展芯片XR16V554接收三通道数字化光纤陀螺的输出数据,由单片机串口接收GPS接收机的输出数据。单片机将采集到的数据打包后,通过串口输出给导航计算机进行解算。测试表明:表征数据采集单元3个模/数转换通道量化噪声水平的1小时采样数据的1σ标准差最大值为1.76 μg(@ 1 Hz),优于待测加速度计偏置稳定性(1小时采样数据的1σ标准差)为50 μg(@ 1 Hz)的性能指标;数据采集单元同时能完成基于串口通信的陀螺输出信号、GPS接收机输出信号的接收及所有采集信号的正确传输。
关键词:组合导航系统;多通道数据采集系统;多路串口扩展; MSP430; GPS接收机
卫星/惯性组合导航系统因其优良的性能,在军用与商用导航领域得到了广泛的应用。卫星/惯性组合导航系统中的嵌入式计算机系统主要由数据采集单元与导航计算机两部分组成。其中,数据采集单元的任务是:将采集到的惯性传感器数据与GPS接收机输出的数据传送给导航计算机进行导航解算,从而得到速度、位置、姿态等导航信息。作为卫星/惯性组合导航系统的信息来源,数据采集单元直接影响着组合导航系统的整体性能[1-3]。
论文讨论的数据采集单元,主要实现对由三个轴向的电流输出石英挠性加速度计及三个轴向的数字化光纤陀螺组成的IMU中的各个传感器信号进行数据采集,采样率为100 Hz。石英挠性加速度计的量程为±10 gn,偏置稳定性(1σ)为5×10-5gn(1 Hz采样率) ;每个光纤陀螺通过各自的串口输出传感器敏感的角速率;系统同时能通过串口接收GPS接收机输出的信息。
针对电流输出型加速度计,以往大多采用专门设计的多通道I/F转换电路将加速度计输出的电流信号进行I/F转换,然后通过利用CPLD(或FPGA)设计的多通道计数器完成加速度计的数据采集[4-5];针对光纤陀螺的多串口接收,也常用CPLD(或FPGA)进行多串口扩展[6-7]。这些设计方案都能有效地完成数据采集任务,但系统结构相对复杂、通用性不强,成本高,功耗大。
随着微电子技术的飞速发展,速度快、精度高、体积小、功耗低成为组合导航系统硬件平台的主要发展趋势。在设计数据采集单元时,采用了低功耗高性能单片机MSP430作为控制器[8-9];根据需采集的加速度计的性能,采用I/V转换+A/D转换的方案代替传统的I/F转换+6通道计数器的方案完成三轴加速度计输出信号的采集;采用高集成性的串口扩展芯片XR16V554接收3个轴向的数字化光纤陀螺的输出数据;通过单片机内置的串口接收GPS接收机的输出数据;采集数据经处理后通过串口发送给导航计算机。由于设计时采用的是集成度高、功耗低的通用电路,因此,系统结构简洁、成本低廉、功耗小,并能满足数据采集的性能要求。
1 系统的总体设计
1.1三轴加速度计信号采集
针对前述卫星/惯性组合导航系统中IMU采用的加速度计的主要性能指标,设计的数据采集单元选用ADI公司具有过采样机制的18 bit 8通道同步数据采集芯片AD7609对加速度计输出信号进行过采样;初始采样率为2 kHz,通过对20个采样数据进行平滑,得到100 Hz的导航解算用采样数据。AD7609内部8个输入通道通过多路选择开关共享一个模/数转换器,但由于每个通道具有各自独立的采样保持器,因此通过使多通道同时从采样状态切换到保持状态(然后再对各个通道进行分时转换),可以保证多通道信号的同时采集[10]。由于输入是差分的,因此还能避免各通道共地造成的信号串扰。
1.2三轴陀螺信号采集及其他串行接口设计
与机械陀螺相比,光纤陀螺具有耐冲击、长寿命、高分辨率、宽动态范围、启动时间短等突出优点,已成为捷联式惯性导航系统中理想的惯性器件[11-12]。卫星/惯性组合导航系统中的IMU采用的某型光纤陀螺采用数字输出方式,通过UART输出数字化信息,通信波特率为115 200 bit/s;帧格式为:偶校验,8 bit数据位,1 bit停止位。三个轴向的陀螺信号采集,需要3个UART。
系统采用的GPS接收机为U-blox公司的GPS接收模块LEA-5H,该模块可通过USB或UART实现信息传输。由于采用UART传输信息已能满足需要,为简化设计,设计的数据采集单元采用UART与GPS接收机进行通信。
在数据采集单元的设计过程中,采用了通过XR16V554扩展多串口(UART)的方案来弥补数据采集单元中的控制器内置UART数量不足的问题。通过扩展XR16V554,可扩展4个拥有16 byte接收/发送FIFO的UART。
1.3数据采集单元的总体方案
综上所述,设计了如图1所示的卫星/惯性组合导航系统中的数据采集单元结构。
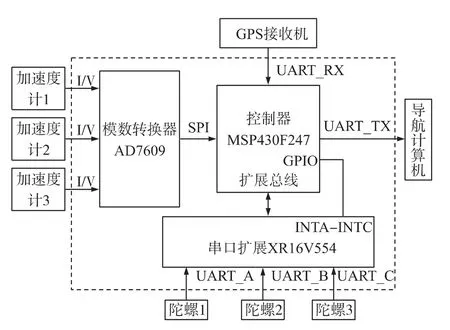
图1 数据采集单元结构框图
由图1可见,设计的数据采集单元主要由虚线框内的AD7609、MSP430F247及XR16V554组成。
模数转换器AD7609将经I/V转换后的加速度计模拟输出数字化,并通过SPI接口将数据送给微控制器。微控制器通过总线方式访问XR16V554,读取通过3个UART接收的3个光纤陀螺输出,而GPS接收机的输出直接与微控制器的UART接收端相连。数据采集单元在微控制器的协调控制下,实现数据的采集、接收、打包等处理,最后将打包后的数据通过微控制器的UART的发送端发送给导航计算机。
2 数据采集单元的硬件实现
2.1基于AD7609三轴加速度计信号采集
需采集的加速度计的标度因数为1 mA/gn,因此其电流输出范围为±10 mA。由于AD7609各通道的输入阻抗足够大(大于1 MΩ),因此可考虑直接采用采样电阻的方式实现I/V转换。当选择AD7609模拟输入范围为±5 V时,可选择500 Ω高精度取样电阻并联在AD7609的差分输入端的方式实现I/V转换,如图2所示。这样传感器的满量程与AD7609的满量程一致,充分利用了AD7609的A/D转换性能。
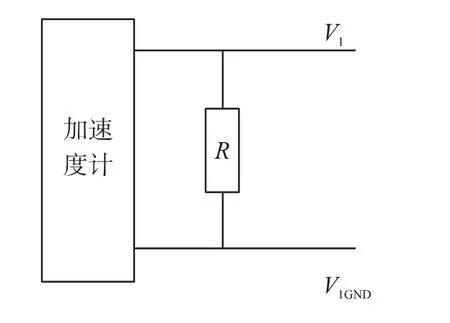
图2 I/V转换方案
通过AD7609的OS[2: 0]这3个引脚可以选择AD7609的过采样倍率,在最高过采样倍率下(64倍率),A/D转换的采样率仍能达到3.125 ksample/s,足以满足系统100 Hz的采样率要求。设计时,通过使OS[2: 0]引脚配置成110,使其工作在64倍采样率模式(以获取最高的A/D转换满量程量化信噪比)。控制器通过控制AD7609的开始转化信号CONVST A引脚启动AD7609前4个通道的同时采样过程;当转换完成后,通过AD7609的SPI接口读取A/D转换结果,完成一次三轴加速度计的数据采集。
AD7609自带温度系数为±10×10-6/℃的2.5 V基准源。为使数据采集单元在宽温范围内具有更好的性能,为AD7609配置了温度系数更小的外部基准源ADR421B(温度系数为±3×10-6/℃)。同时对REFIN/REFOUT、REFCAPA和REFCAPB等引脚,通过10 μF电容进行了去耦。
2.2基于XR16V554的三轴陀螺信号采集
采用XR16V554的Intel总线连接形式,通过地址引脚A[2: 0],微控制器可以选择该芯片内部的相关寄存器,寄存器寻址如表1所示。通过寄存器配置可进行波特率选择、FIFO工作方式选择、使能中断、读取状态标志等操作。为匹配光纤陀螺串口速率,在外接14.745 6 MHz晶振时,通过配置前置脉冲分频器(MCR bit-7 = 1),可得到115 200 bit/s的串口波特率。通过CSx引脚可以选择相应的串口通道。将INTx与控制器的GPIO引脚相连,在产生中断后,通过判断相关通道的状态,完成对应通道的数据接收。
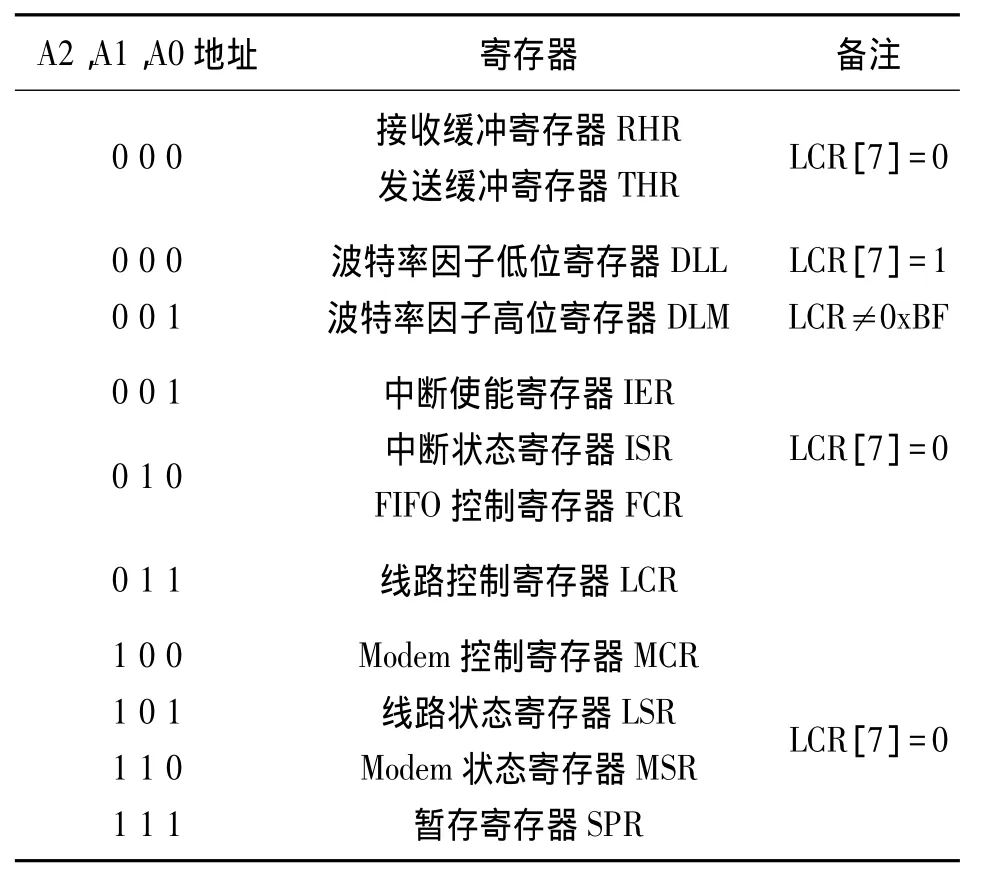
表1 XR16V554片内寄存器地址
3 数据采集单元的软件实现
数据采集单元的软件实现主要包括以下几个方面:系统控制主流程,定时器中断函数,外部中断函数,串口中断函数。
3.1系统控制主流程
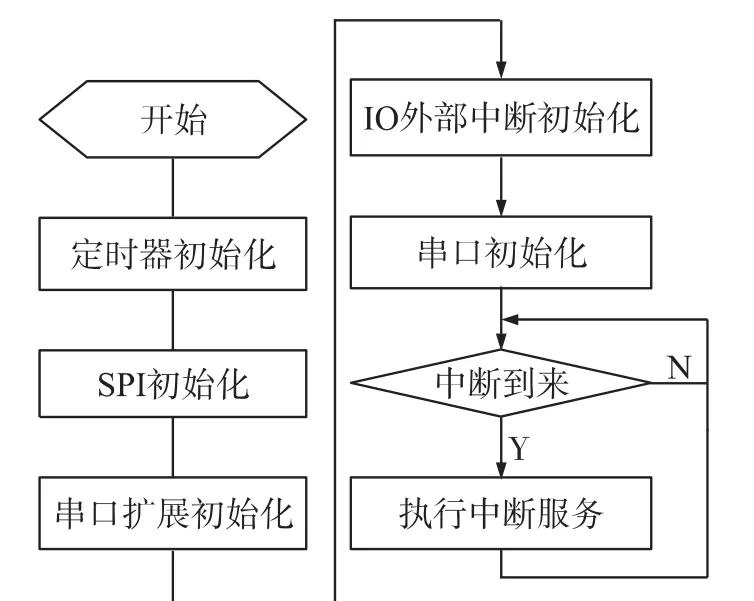
图3 系统控制主流程
系统控制的主流程如图3所示。当系统开始工作后,首先进行各模块的初始化。通过定时器初始化,配置定时器为增计数模式,使能定时器中断,当达到预定值便产生定时器中断请求,系统进入定时器中断服务。通过SPI初始化,使控制器SPI工作在主模式,用以接收ADC采集到的加速度计信号。通过对扩展串口芯片XR16V554的初始化,使其工作在FIFO模式,当存储的数据达到规定字节数后,相应的INTx引脚向控制器发出中断请求。通过初始化配置控制器的GPIO口,可以响应XR16V554产生的中断请求。最后配置控制器本身的串口,使其采用DMA模式向导航计算机发送数据。接收端采用中断模式,用以接收GPS接收机的输出数据。在完成上述初始化工作后,为充分发挥MSP430低功耗特点,使系统处于低功耗0模式,等待中断到来。若有中断请求,控制器便从低功耗模式唤醒,转而完成中断服务。
3.2定时器中断函数
定时器中断函数执行流程如图4所示。定时器以0.5 ms为时间间隔周期性地产生中断请求。在中断子函数中,控制器首先发出触发电平,用于启动ADC的A/D转换,随后选通SPI通道,读取模数转换结果。为降低噪声对A/D的影响,在2 kHz进行A/D转换时,采用了A/D转换芯片自带的过采样技术。当2 kHz的采样率采集满20个数据后,求取这20个数据的平均值,作为本次导航计算用的3个轴向的加速度信息(100 Hz)。得到导航计算用加速度信息的同时,微控制器向光纤陀螺发出触发电平,使其通过串口输出数字化的角速率信息由扩展的串口芯片接收。当控制器读取接收到的3个轴向的角速率信息后,判别是否有更新的GPS导航信息,若有,更新GPS信息。最后以DMA方式通过控制器的串口输出打包后的数据采集信息。
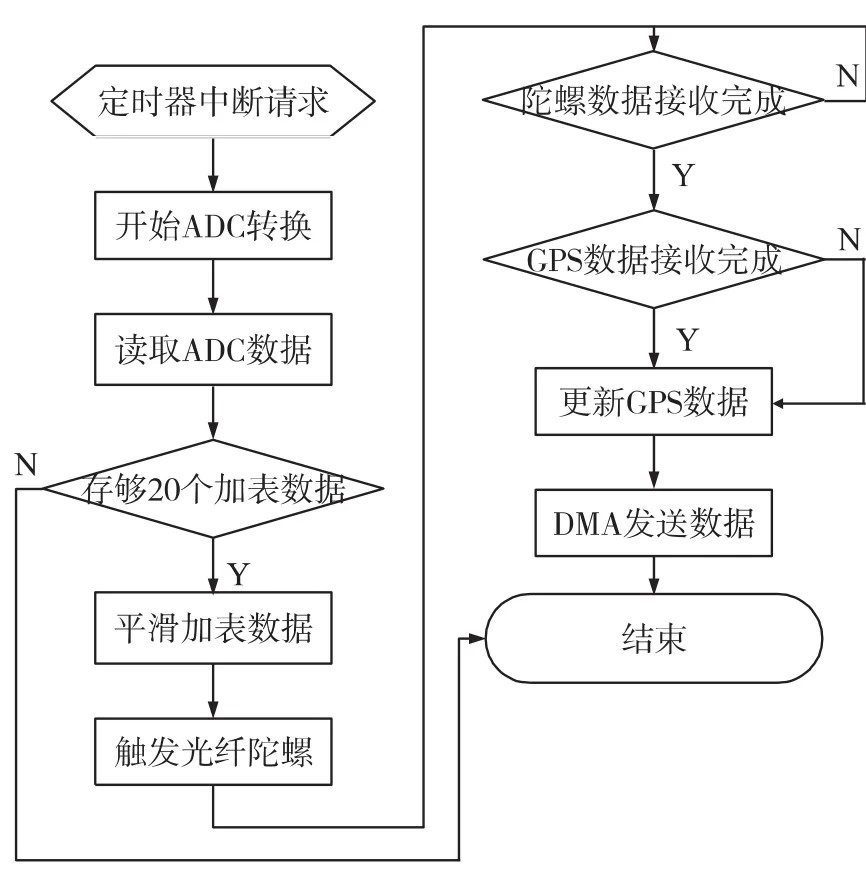
图4 定时器中断服务
3.3外部中断函数与串口中断函数
控制器通过判断中断信号来源确定扩展的哪个UART完成了数据接收,从而确定读取的数据来源于哪个光纤陀螺。随后将接收到的数据存于相应的内存空间,直到接收完所有通道的数据后,改变标志变量,表示三个轴向的陀螺输出数据已接收完成。陀螺接收流程如图5所示。
微控制器通过芯片内嵌的UART接收GPS接收机输出的信息,通过按序查找字符“MYM GPGGA”发现信息的帧头,然后按照帧格式读取帧中数据并存储。
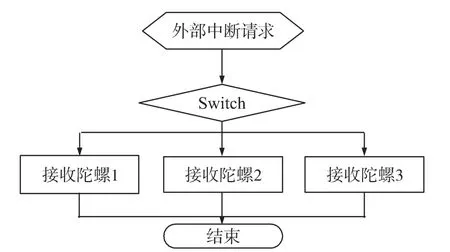
图5 陀螺数据接收流程
4 系统测试
设计完成的数据采集单元如图6所示。
对设计完成的数据采集单元的测试,主要包括2个部分:一是3个通道的模拟信息的采集;二是数字信息的获取及所有采集信息的发送。
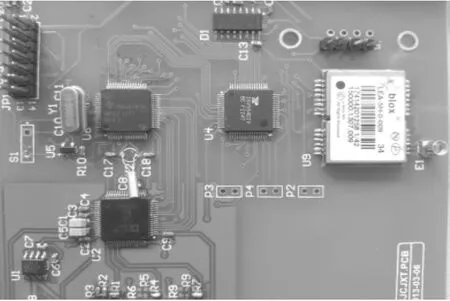
图6 数据采集单元实物
结合应用背景,对3个通道的模拟信息采集的性能评估是这样进行的:将AD7609的3个A/D转换通道的差分模拟输入端短接,然后采集1 h数据。由于A/D转换器是以2 kHz进行A/D转换然后平滑到100 Hz的,因此,将AD7609输出的18 bit A/D转换结果扩展为32 bit,图7中所示的是纵坐标为32 bit二进制表示时100 Hz采样率下3个通道1 h采集到的码值。由这些采样数据计算得到的1 Hz 下3个通道的采集数据的1σ统计值,如表2所示。表中表征测量噪声水平的1σ/232的最大值为8.8× 10-8,等价于8.8×10-8×(10-(-10) ) gn= 1.76 μgn。显然优于待测加速度计1σ偏置稳定性为50 μgn的性能指标(加速度计性能指标中的偏置稳定性定义为1 Hz采样率下1 h采集数据的1σ统计值)。即设计完成的数据采集单元中的三通道模拟信号采集的噪声水平比待测加速度计的噪声水平低1~2个数量级,满足设计要求。
在此基础上,在数据采集单元的3个模拟量输入通道接入3只某型石英挠性加速度计,100 Hz采样率下3个通道1 h采集到的加速度值如图8所示。1 Hz平滑后的1σ偏置稳定性分别为57.8 μgn、39.5 μgn和43.9 μgn。
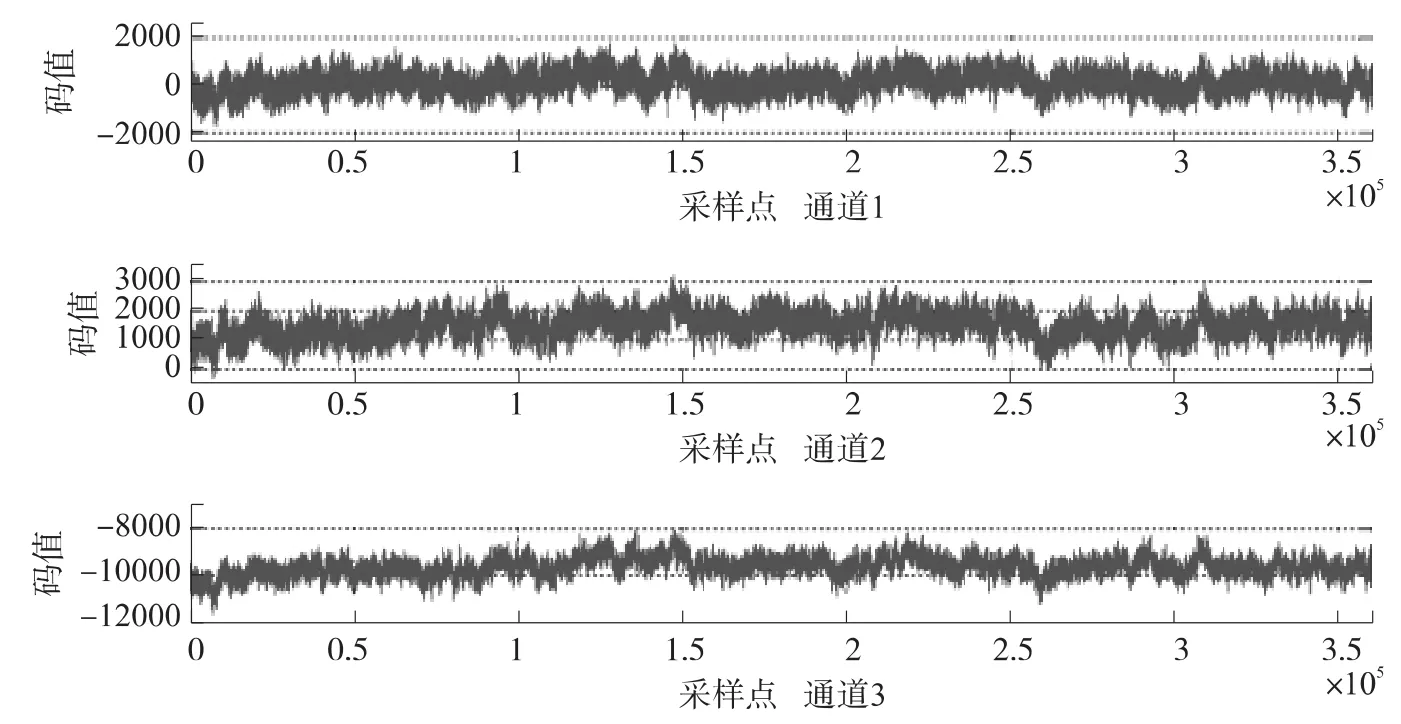
图7 输入端短路时3个通道1 h测试采样值(@ 100 Hz)
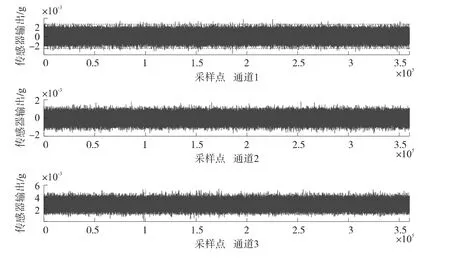
图8 3只石英挠性加速度计1 h测试采样值(@ 100 Hz)
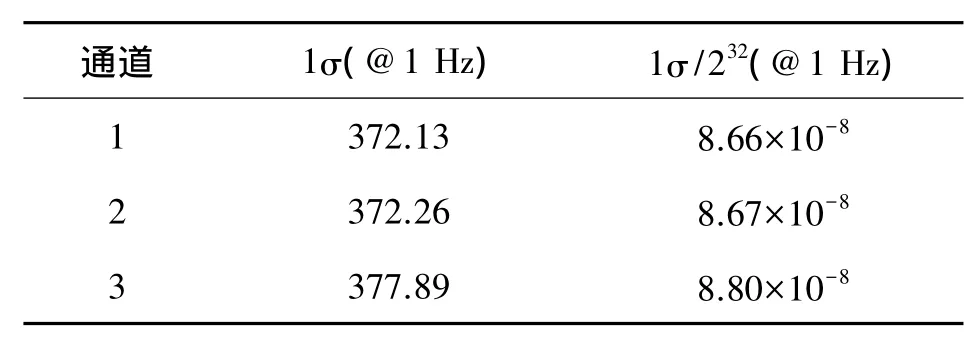
表2 3通道数据采集噪声测试
对于数据采集单元中的三轴陀螺信号采集及其他串行通信接口,也进行了单独测试,并完成了系统总体调试,各部分均能按照设计的时序正常工作。由于此部分调试仅涉及数字信息传输而不涉及测量精度问题,因此不再列出具体的测试数据等细节。
5 结语
针对卫星/惯性组合导航系统对数据采集单元提出的设计要求,设计了一种结构简单、通用性好、功耗低的数据采集单元。测试表明,设计完成的数据采集单元能实现对加速度计模拟输出的采集与光纤陀螺、GPS接收机数字输出信息的接收,采集到的数据能可靠地通过UART传送给导航计算机进行导航解算。当采集单元中的AD7609替换成24 bitΣ-Δ型ADC时,文中介绍的数据采集单元可以在其他特性不变的前提下实现由更高精度的加速度计组成的卫星/惯性组合导航系统的数据采集。
参考文献:
[1]刘刚,郭美凤,张嵘,等.MIMU精度对GNSS/MINS组合导航系统性能影响仿真分析[J].中国惯性技术学报,2013,21(6) : 786-791.
[2]李枚,代刚,唐海林,等.一种高动态使用微惯性测量单元的实现[J].中国惯性技术学报,2012,20(2) : 127-135.
[3]赵志方,常佶.基于MEMS和CORTEX-M3的微惯性测量单元研制[J].微计算机信息,2011,27(7) : 75-76.
[4]刘飞,周卫宁,林恒.捷联惯导系统加速度计采集电路设计[J].电光与控制,2011,18(7) : 86-89.
[5]黄丽娟,邵志浩,郑永强,等.加速度计I/F变换电路数字补偿方法[J].中国惯性技术学报,2014,22(4) : 547-551.
[6]徐玉丹,陶辉,秦龙,等.一种基于FPGA的芯片测试多通道串口扩展设计[J].电子测量技术,2013,36(3) : 89-93.
[7]张志文,彭彦.基于FPGA和NIOS的惯导组件测试测试系统研究[J].微处理机,2014(1) : 85-89.
[8]Tang Yawei,Jiang Kai,Fu Xiuquan,et al.Low Power Dual-Core Holter Systerm Based on MSP430 and ARM7[C]/ /3rd International Conference on Bioinformatics and Biomedical Engineering,2009: 1476-1478.
[9]Wang Chau-Chang,Hsiao Yu-Hung,Huang Min-Chih.Development of MSP430-Based Ultra-Low Power Expandable Underwater Acoustic Recorder[J].Ocean Engineering,2009,36(6-7) : 446- 455.
[10]朱欣华,邹丽新,朱桂荣.智能仪器原理与设计[M].北京:高等教育出版社,2011: 43-44.
[11]王丽琴.光纤陀螺仪及其应用[J].自动化与仪器仪表,2013 (5) : 132-135.
[12]Wang W,Wang X F,Xia J L.The Influence of Er-Doped Fiber Source under Irradiation on Fiber Optic Gyro[J].Optical Fiber Technology,2012,18(1) : 39-43.

杨宗霖(1983-),男,汉族,山东招远人,南京理工大学计算机学院学士,主要研究方向为计算机应用技术,13910847606@ 139.com;

张浩峰(1983-),男,汉族,江苏淮安人,副教授,博士,研究方向为智能机器人、计算机视觉,zhanghf@ njust.edu.cn。
Design and Realization of the Telemetry System of Various Instruction Signals
ZHANG Huixin*,ZHANG Fengying,MA Rui,CUI Lijie
(National Key Laboratory For Electronic Measurement Technology,Key Laboratory of Instrumentation Science and Dynamic Measurement,Ministry of Education,North University of China,Taiyuan 030051,China)
Abstract:Aimed at test for the working status of aircraft accurately,a telemetry system was designed,which can provide various types of instruction signals.The logic control was completed by FPGA,and through Ethernet to communicate with the host computer,the speed of it can be 40 Mbit/s.On the basis of communication protocol combining with peripheral hardware,test parameters are provided for aircraft.The experimental results proved that the range of charged instruction signals produced by this system is stable,and the respond of non-charged instructions is accurate.This system has the advantages of reliability and interchangeability,which occupies a powerful practicality.
Key words:electric circuit; telemetry system; FPGA; Ethernet; W5300; instruction signals
doi:EEACC: 1230; 6210J10.3969/j.issn.1005-9490.2015.02.045
收稿日期:2014-11-24修改日期: 2014-01-04
中图分类号:TN962
文献标识码:A
文章编号:1005-9490(2015) 02-0452-06
