柔性关节机器人的凯恩动力学建模与仿真分析
2015-02-20李成刚林家庆谢志红
崔 文,李成刚,林家庆,谢志红
(南京航空航天大学机电学院,江苏 南京 210016)
柔性关节机器人的凯恩动力学建模与仿真分析
崔文,李成刚,林家庆,谢志红
(南京航空航天大学机电学院,江苏 南京210016)
摘要:针对柔性关节机器人的动力学建模问题,首先在已存在的柔性关节机器人凯恩动力学求解方法的基础上对广义主动力的求解进行分类与合并,详细地推导出传动比不为1的多连杆柔性关节机器人的动力学方程。然后分别运用ADAMS与S函数对柔性关节机器人进行正动力学仿真与数值仿真。最后通过对比仿真,证明了用凯恩方法建立的柔性关节机器人动力学方程的正确性。
关键词:凯恩方法;柔性关节;传动比;ADAMS;S函数
传统的机器人动力学建模是把机器人看作全刚体系统,运用拉格朗日方程、牛顿-欧拉方程进行动力学分析,建立刚性机器人的动力学方程[1-3]。但实际的机器人系统并非刚性系统,关节处的柔性会对机器人尤其是空间机器人的末端误差以及其他的动力学性能产生不可忽视的影响。此外,要实现对机器人的更精确控制必须考虑机器人的动力学性质。因此,建立柔性关节机器人精确的动力学模型具有重要的意义。国内的大部分文献在运用凯恩方法推导柔性关节机器人动力学方程时,对于主动约束力的求解不够明确,而且在求解驱动力对于广义主动力的贡献时忽略了关节传动比或者默认传动比为1[4-5]。为了解决这些问题,从而可以对柔性关节机器人进行更好的动力学分析与控制,本文给出了关节传动比不为1的多连杆柔性关节机器人的凯恩动力学建模方法。
1柔性关节的简化模型
采用比较简单的Spong模型建立柔性关节的模型[4]。Spong模型提出了2个假设:1)用线性弹簧来描述系统的关节柔性,其弹性力(或力矩)和关节的柔性变形是线性关系;2)把电机的转子看作是集中在转轴上的一个整体,如图1所示。
图中:φi为电机输出轴转角;θi为电机经过减速装置后输出的转角;qi为连杆的角位移,即经过扭转弹簧后输出的转角;Ni为减速装置的传动比;Ji为电机转子的转动惯量;Ii为机器人连杆的转动惯量;ki为扭转弹簧的弹性系数。εi为扭转弹簧变形所引起的变形转角,εi=qi-θi。

图1 柔性关节简化模型
2用凯恩方法建立柔性关节机器人的动力学方程


(1)
2.1求偏角速度与偏速度
凯恩方法中的偏速度或偏角速度并不是速度或角速度,只是表示速度或角速度对于第j个广义速率Uj的偏导数。简单地讲就是指在速度与加速度表达式里广义速率前的系数,由此可以从连杆速度与加速度的递推公式[6]推出连杆相对于广义速率的偏速度与偏角速度,可得

(2)

(3)

(4)

2.2 系统的广义惯性力


(5)
由文献[4]可知所有关节转子相对广义速率Uj的广义惯性力为:
(6)
式中:Izj为转子沿自转轴的转动惯量。
2.3 系统的广义主动力

为了使广义主动力的推导变得简单而且易于理解,需要将主动约束力进行分类合并。因此,将情况1)、2)放在一起计算,看作是连杆i-1与关节转子i之间主动约束力对广义主动力的贡献;将情况3)、4)放在一起计算,看作是关节转子i与连杆i之间的主动约束力对广义主动力的贡献,如图2所示。
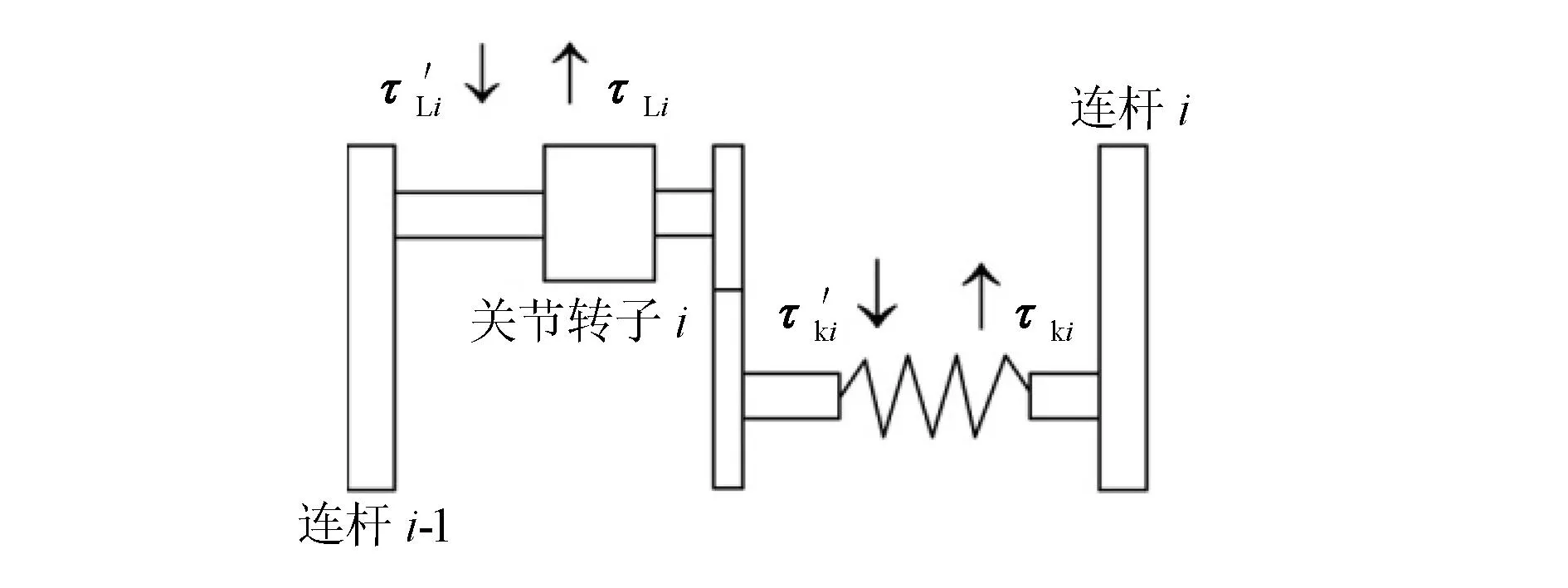
图2 主动约束力位置
1)连杆i-1与关节转子i之间主动约束力的广义主动力。
根据连杆速度与角速度的递推公式可知,连杆i-1的绝对角速度为iωi-1,关节转子i的绝对角速度为iωRi。
(7)
由式(7)可得
(8)
式中:iωi-1,j与iωRi,j分别为iωi-1与iωRi相对广义速率Uj的偏角速度。


(9)
因此由式(9)可得连杆i-1与关节转子i之间主动约束力(驱动力矩)的广义主动力为
(10)
则所有的驱动力矩对广义主动力的贡献为
(11)
2)关节转子i与连杆i之间的主动约束力的广义主动力。

(12)
由于柔性(扭转弹簧)的作用,关节两端的角速度不相等,设靠近连杆i-1一端的绝对角速度为iΩi-1,靠近连杆i一端的绝对角速度为iΩi,于是得到如下公式:
(13)
则iΩi的相对广义速率Uj的偏角速度为

(14)

(15)
于是得到所有弹簧两端的扭矩(柔性关节内力)相对广义速率Uj的广义主动力为
(16)
2.4 系统的凯恩方程

(19)

3仿真分析

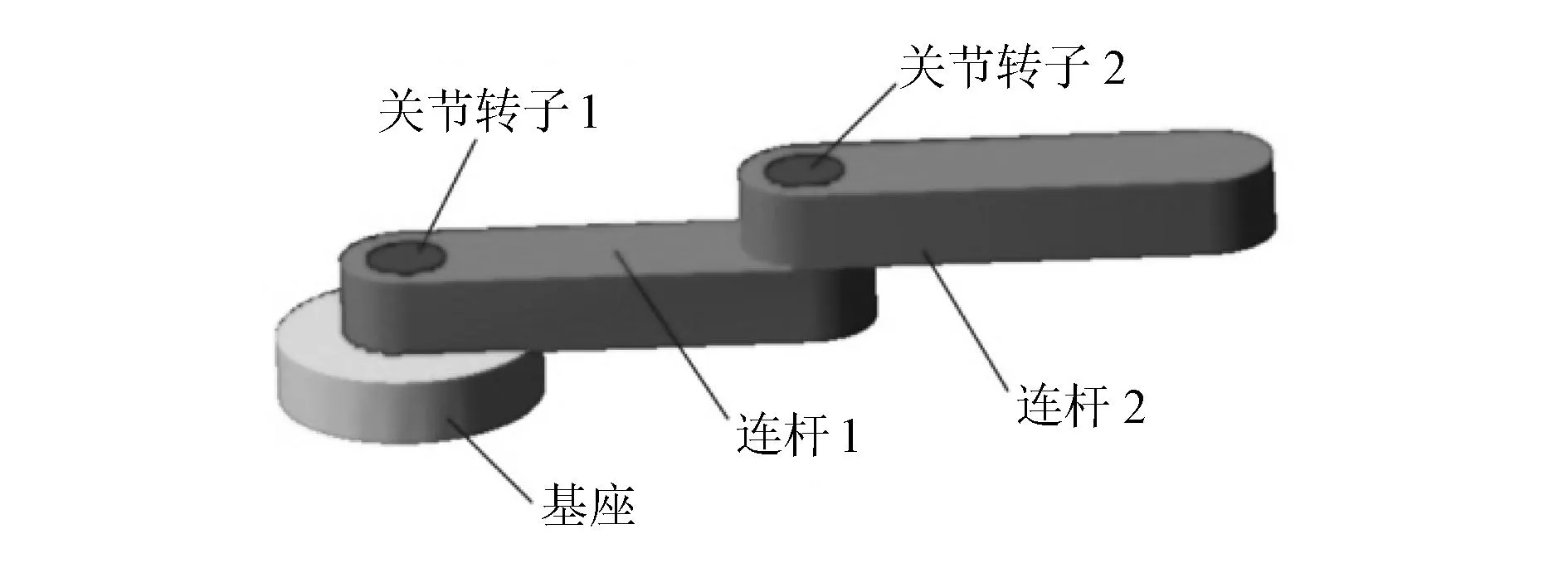
图3 虚拟样机模型
本文进行柔性关节机器人的正动力学仿真,输入为关节力矩,输出为关节角位移。设置扭转弹簧刚度系数k1=k2=2 000N·m/rad,关节传动比N1=N2=100。将运动学模型得出的速度、加速度、偏速度的数值以及由ADAMS模型得出的质量、惯量参数[8]代入动力学方程中整理得到具体的数学方程,可得
(20)
其中:
q=(q1,q2)T,

θ=(θ1,θ2)T,

K=diag(2 000,2 000),
G(q)=(0,0)T,
N2J=diag(0.019 7,0.019 7),
Nτ=(N1τ1,N2τ2)T,


根据这组微分方程组在MATLAB中编写S函数进行数值仿真,如图4所示。

图4 MATLAB中Simulink仿真模型
由上述处理过程可知,ADAMS中的虚拟样机是根据实际柔性关节机器人模型建立的,而S函数中的仿真模型是根据动力学方程得到的,因此将ADAMS动力学仿真直接得出的曲线当作实际值,将MATLAB中Simulink数值仿真得到的曲线作为理论值,然后进行对比分析。
首先设置关节输入力矩N1τ1=50N·mm,N2τ2=5N·mm,可分别得到理论与实际关节角位移曲线,如图5,6所示。

图5 关节1的角位移曲线
再将关节力矩设置成随时间变化的量:N1τ1=50sin(t)N·mm,N2τ2=5sin(t)N·mm,分别得到理论与实际关节角位移曲线,如图7,8所示。

图6 关节2的角位移曲线

图7 关节1的角位移曲线

图8 关节2的角位移曲线
由图5~8可知,无论输入力矩为常量还是变量,理论角位移曲线与实际角位移曲线都比较接近。这表明由凯恩方法建立的柔性关节机器人的动力学方程是正确的和有效的。
通过对比得到的曲线可知,ADAMS仿真曲线与MATLAB的S函数数值积分总是存在误差,这是因为运用凯恩方法建立的柔性关节机器人动力学方程中忽略了关节转子与连杆之间的惯性耦合,而ADAMS软件仿真时考虑到了惯性耦合的影响。
4结束语
本文在柔性关节机器人传动比不为1的情况下,系统地给出了用凯恩方法建立柔性关节机器人动力学方程的推导过程,并运用动力学分析软件ADAMS与S函数进行对比仿真。仿真结果表明,本文给出的关节传动比不为1的柔性关节机器人的凯恩动力学建模方法是正确的与有效的,而且可以适用于任意自由度、任意空间形式的柔性关节机器人。此外,本文的凯恩方法中将主动力的贡献进行分类与合并,使推导过程更加清晰易懂,为其他学者用凯恩方法建立柔性关节机器人动力学模型奠定了良好的基础。
参考文献:
[1]高亚,王仲民,邓三鹏,等. 基于Pro/E与ADAMS的履带式移动机器人动力学研究[J]. 煤矿机械,2012,33(1):57-59.
[2]石炜,郗安民,张玉宝. 基于凯恩方法的机器人动力学建模与仿真[J]. 微计算机信息,2008,24(29):222-223.
[3]王航,祁行行,姚建涛,等. 工业机器人动力学建模与联合仿真[J]. 制造业自动化,2014(17):73-76.
[4]边宇枢,陆震. 柔性机器人动力学建模的一种方法[J]. 北京航空航天大学学报,1999,25(4):486-490.
[5]周胜丰. 柔性机器人动力学建模和仿真[D]. 南京:南京理工大学,2003.
[6]蔡自兴. 机器人学[M].北京:清华大学出版社,2000.
[7]梁浩,余跃庆,张成新. 基于ADAMS及ANSYS的柔性机器人动力学仿真系统[J]. 机械科学与技术,2004,21(6):892-895.
[8]李增刚. ADAMS入门详解与实例[M]. 北京:国防工业出版社,2006.
Kane dynamic modeling and simulation analysis for the flexible-joint robot
CUI Wen, LI Chenggang, LIN Jiaqing, XIE Zhihong
(School of Mechanicak and Electrical Engineering,
Nanjing University of Aeronautics and Astronautics, Jiangsu Nanjing, 210016, China)
Abstract:Aimming at the problem of dynamic modeling of flexible-joint robot, it classifies and merges the solution of generalized active force, derives the dynamic equation of the flexible joint robot where the transmission ratio is not 1 in detail on the basis of the existed kane modeling method. Based on ADAMS, it analyzes the dynamic simulation and the S function, realizes a numerical simulation on the flexible-joint robot. At last, it compares the simulation results and proves the correctness of the dynamic equation of the flexible joint robot established by Kane method.
Key words:Kane method; flexible-joint; transmission ratio; ADAMS; S function
作者简介:崔文(1990—),男,江苏徐州人,南京航空航天大学硕士研究生,主要研究方向为机器人动力学与控制。
基金项目:江苏省研究生培养创新工程(SJLX0119);中央高校基本科研业务费专项资金资助
收稿日期:2015-11-17
中图分类号:TH113
文献标志码:A
文章编号:2095-509X(2015)12-0005-05
DOI:10.3969/j.issn.2095-509X.2015.12.002
