叉车线控转向系统转向轮转角模糊控制策略研究
2015-01-15张青林肖本贤郭军良方紫剑
张青林 肖本贤 郭军良 范 进 方紫剑
(1.合肥工业大学电气与自动化工程学院,合肥 230009;2.合肥搬易通科技发展有限公司,合肥 230001)
目前叉车转向系统仍处于机械或液压传动方式,由于转向的传动比不变,叉车的转向特性随着车速和方向盘转角变化呈非线性时变特性[1]。为控制叉车在狭小的空间里频繁地转向行驶,驾驶员必须对变化的转向特性做出预测并补偿,加重了驾驶员的精神负担。线控转向系统取消了方向盘与转向轮之间的机械连接,使方向盘与转向轮之间的关系可以自由设计,不但可以改善叉车转向的力传递特性,还可以改进叉车转向的角传递特性[2],使其转向操作时满足低速轻便性和高速稳定性要求。
笔者根据TE60型托盘搬运叉车的实际数据建立数学模型,基于模糊控制技术设计变传动比控制器,从车辆动力学和安全转向的角度分析模糊变传动比的主动转向控制策略,并引入横摆角速度模糊PID反馈控制策略,对转向轮转角进行动态修正,改善其动态响应特性,并通过仿真分析来验证其控制的有效性。
通过改变传动比使方向盘转角与转向轮转角呈现与车速无关的固定比例关系,简化转向操作,减轻驾驶员负担[1],定义这种传动比为理想传动比。传动比i为方向盘转角δsw与转向轮转角δwh之比[3],即:

(1)
笔者采用线性二自由度整车模型,研究整车的静态响应和动态响应[4,5],公式如下:
(2)
式中a——质心到前轴的距离;
b——质心到后轴的距离;
Iz——车辆转动惯量;
k1——前轮胎侧偏刚度;
k2——后轮胎侧偏刚度;
m——整车质量;
u——车速在水平方向的分量;

β——质心侧偏角,当叉车质心侧偏角较小时β≈tanβ=v/u;

δwh——前轮转角。
若车辆进行等速圆周转向,由式(1)、(2)可得:
(3)


(4)
由式(4)可知,传动比i不仅与车辆自身的参数有关,还与方向盘转角、车速和横摆角速度有关。
2 叉车相关数据
TE60型托盘搬运叉车整车模型如图1所示,相关模型参数为:m=1100kg,a=0.518m,b=0.95m,k1=-55856N/rad,k2=-55856N/rad,Iz=1063kg·m2,umax=15km/h,δsw∈[-90°,90°],δwh∈[-90°,90°]。

图1 TE60型托盘搬运叉车整车模型
3 模糊变传动比控制器
传统的变传动比控制方法主要是基于数学模型推导得到的,因而无法避免机械部件等因素对控制所带来的影响。模糊控制不需要被控对象复杂的数学模型,因此笔者采用模糊变传动比控制方法。由式(4)可知传动比与车速和方向盘转角有关,因此控制器选用方向盘转角δsw和车速u为输入,传动比i为输出[6]。u和δsw的输入量化因子分别为2和1,i输出比例因子为1。u的变化范围是[0,15]km/h,对应语言变量为{NB,NM,NS,Z,PS,PM,PB},语言值为{0,5,10,15,20,25,30}。δsw的变化范围是[-90°,90°],对应的语言变量为{NB,NM,NS,Z,PS,PM,PB},语言值为{-90,-60,-30,0,30,60,90}。i的变化范围是[1,13],对应语言变量为{NB,NM,NS,Z,PS,PM,PB},语言值为{1,3,5,7,9,11,13},隶属度函数为高斯函数,去模糊化为重心法。基于驾驶员实际操作经验制定的模糊控制规则见表1。

表1 模糊变传动比控制规则
4 模糊变传功比仿真分析
图2为转向传动比曲面图,可以看出,随着方向盘转角或者车速的增大,传动比增大,满足低速或小转角时小传动比以保持转向的灵活性,高速或大转角时大传动比以保持转向的迟钝性。

图2 转向传动比曲面
图3、4为车速、方向盘转角与灵敏度的关系。从图3可以看出,在方向盘转角不变的情况下,灵敏度随着车速的增大而迅速增大,并且最后均趋于常数0.4。从图4可以看出,在车速不变的情况下,随着方向盘转角的增大,灵敏度减小,并在转角增大到±30°时,灵敏度基本为常数0.4。由此可知,采用模糊变传动比控制时,随着车速或转角的增大,灵敏度变化变得微小,驾驶员无需灵敏度过度补偿,提高了叉车操作的稳定性。

图3 车速与灵敏度的关系

图4 方向盘转角与灵敏度的关系
图5为定传动比(传动比为8)转向和模糊变传动比转向的灵敏度与车速关系。从图5可以看出,模糊变传动比转向在低速时的灵敏度增长速度快于定传动比转向,并且在车速为3km/h时趋于定值,而定传动比转向灵敏度一直保持增长,导致在高速时定传动比转向的灵敏度高于模糊变传动比转向。由此可知,模糊变传动比转向低速时的转向灵敏性和高速时的转向稳定性优于定传动比转向。

图5 灵敏度与车速的关系
5 横摆角速度反馈

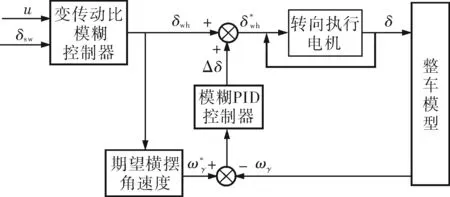
图6 横摆角速度反馈控制框图
图6中期望横摆角速度为:
(5)
式中g——重力加速度;
μ——路面附着系数。
模糊PID控制器中输入输出语言变量的语言值均分为7个等级,分别为NB、NM、NS、Z、PS、PM、PB,其中输入变量e和ec的模糊论域均为[-1.2,1.2],输出变量模糊论域kp为[-6,6],ki为[-0.6,0.6],kd为[-1,1]。输入变量隶属度函数为高斯函数,输出变量隶属度函数为三角形函数。去模糊化选用面积平分法[8]。根据PID整定中各个参数的作用和相互关系,制定模糊控制规则表(表2~4)。
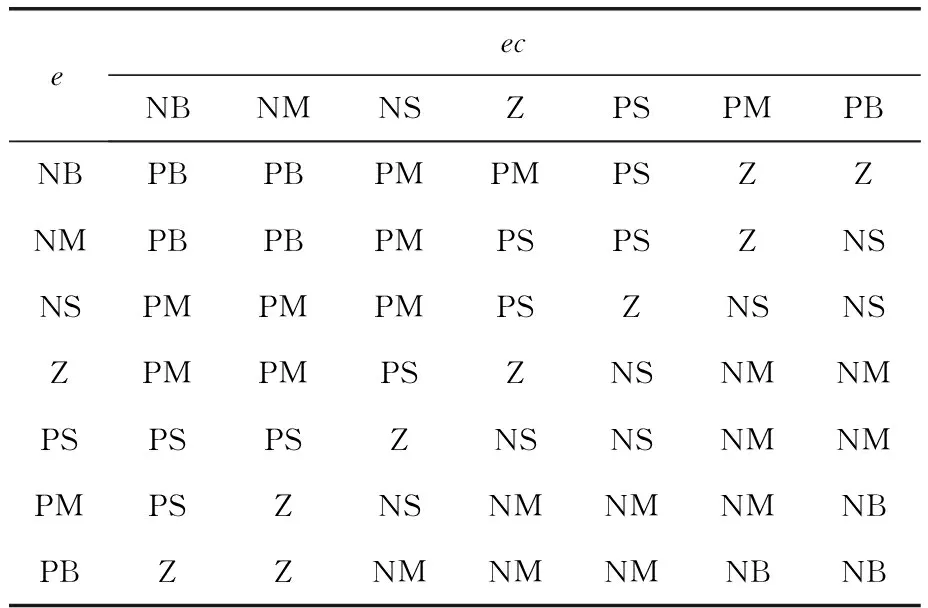
表2 kp的模糊规则

表3 ki的模糊规则

表4 kd的模糊规则
6 横摆角速度反馈仿真分析
图7~10为路面附着系数μ=0.6、叉车行驶速度为5、13km/h、方向盘转角度数为正弦信号δsw=30sin(πt)时,叉车在定传动比控制、无反馈模糊变传动比控制和带反馈模糊变传动比控制时的横摆角速度和质心侧偏角响应曲线。

图7 u=5km/h横摆角速度正弦响应
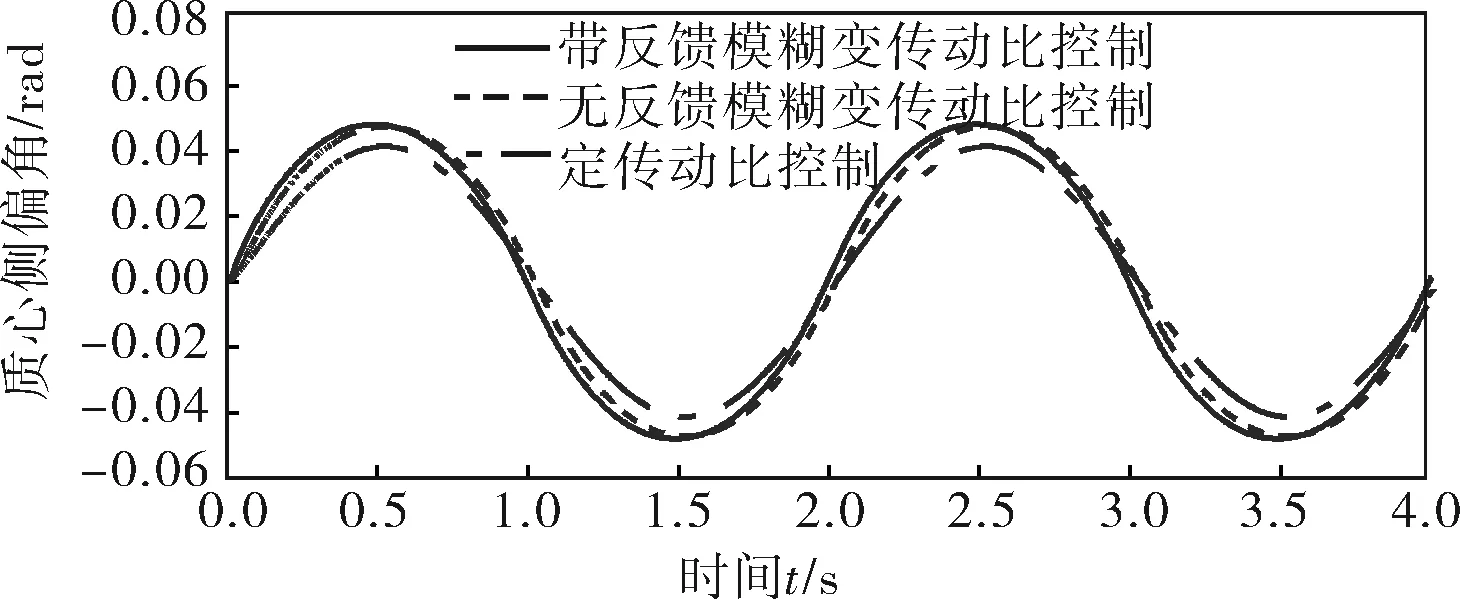
图8 u=5km/h质心侧偏角正弦响应
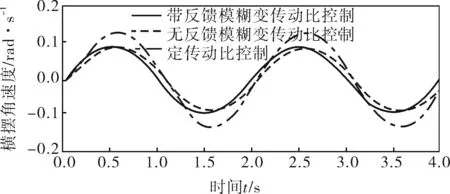
图9 u=13km/h横摆角速度正弦响应

图10 u=13km/h质心侧偏角正弦响应
从图7、8中可以看出,采用带反馈模糊变传动比控制时的横摆角速度和质心侧偏角的峰值大于定传动比控制,说明低速行驶时,传动比较小,叉车只需较小的方向盘转角便可实现较大的转向轮转角,驾驶员的转向轻便性较好。从图9、10中可以看出,采用带反馈模糊变传动比控制时的横摆角速度和质心侧偏角的峰值小于定传动比控制。说明高速行驶时,传动比较大,叉车需要较大的方向盘转角才能实现较小的转向轮转角,驾驶员的操作稳定性较好。
从图7~10中可以看出,采用带反馈模糊变传动比控制时的横摆角速度和质心侧偏角响应速度和到达峰值的时间均快于无反馈模糊传动比控制和定传动比控制,说明采用带反馈模糊变传动比控制时,叉车跟随方向盘转角变化的速度快于无反馈模糊传动比控制和定传动比控制,能够很好地跟随驾驶员的转向意图,提高了叉车的路径跟踪能力,缩短了叉车的响应时间。
7 结束语
针对叉车的转向要求,设计了一种叉车转向轮转角模糊控制策略。在分析线性二自由度整车模型的基础上,推导出与传动比相关的变量,设计了基于车速和方向盘转角的模糊变传动比控制方法,仿真结果表明,基于模糊控制的变传动比控制方法,既满足了叉车转向要求,也提高了叉车操作的稳定性。为加快叉车的响应速度,引入横摆角速度模糊PID反馈控制方法。仿真结果表明,增加横摆角速度模糊PID反馈控制,缩短了叉车的响应时间,提高了叉车转向的灵活性。
[1] 郑宏宇,宗长富,田承伟,等.基于理想转向传动比的汽车线控转向控制算法[J].吉林大学学报(工学版),2007,37(6):1229~1235.
[2] 田杰,高翔,陈宁.基于分数阶微积分的线控转向系统的控制研究[J].机械科学与技术,2010,29(9):1172~1176.
[3] 于蕾艳,林逸,施国标.线控转向系统的角传动比研究[J].农业机械学报,2007,38(8):190~192.
[4] Baslamisli S C,Polat I,Kose I E.Gain Scheduled Active Steering Control Based on a Parametric Bicycle Model[C].Intelligent Vehicles Symposium.Istanbul:IEEE,2007:1168~1173.
[5] 刘志远,周洪亮,陈虹.汽车横摆的动态模型[J].控制理论与应用,2011,28(8):1145~1150.
[6] 于蕾艳,林逸,施国标.线控转向系统的主动转向控制策略[J].农业机械学报,2008,39(1):4~6.
[7] 徐小东,张冰战.基于模糊逻辑的混合动力汽车控制策略研究[J].合肥工业大学学报(自然科学版),2012,35(6):725~728.
[8] 王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166~172.