新的四维超混沌系统的Hopf分岔分析与分岔控制
2015-02-19张中华付景超
张中华,付景超
(东北电力大学理学院,吉林吉林132012)
自1963年,美国著名气象学家E.N.Lorenz在刻画热对流不稳定性时发现了第一个混沌系统以来,许多新的三维混沌系统被发现,像 Chen系统[1]、Lü系统[2]、Chu系统[3]等等,对这方面的研究也很多[4-7]。此外,电力系统中也存在Hopt分岔。文献[8]给出了求解电力系统动态电压稳定Hopt分岔点的新型混合方法。文献[9]基于中心流形理论对一类小水电并网系统的Hopt分岔进行了分析。文献[10]在Lü系统的基础上,通过设计一个非线性反馈控制器建立了一个新的四维非线性系统,通过Lyapunov指数研究了系统的超混沌行为,并设计自适应控制器控制这种混沌现象。文献[11]在文献[7]的基础上,研究了一个四维超混沌系统的分岔行为,并进一步判定系统分岔的方向和周期解问题。但以上文献没有对超混沌系统的分岔行为进行控制。
本文在文献[10]和文献[11]的基础上,进一步研究四维超混沌系统的分岔控制问题。利用中心流形理论将四维系统降到二维系统,通过研究二维系统的Hopf分岔类型来判定原系统的分岔特性;接着对系统产生的Hopf分岔行为进行极限环幅值(周期解振幅)控制,找出控制参数与幅值之间的关系式,进而判定控制参数对系统极限环幅值的影响。
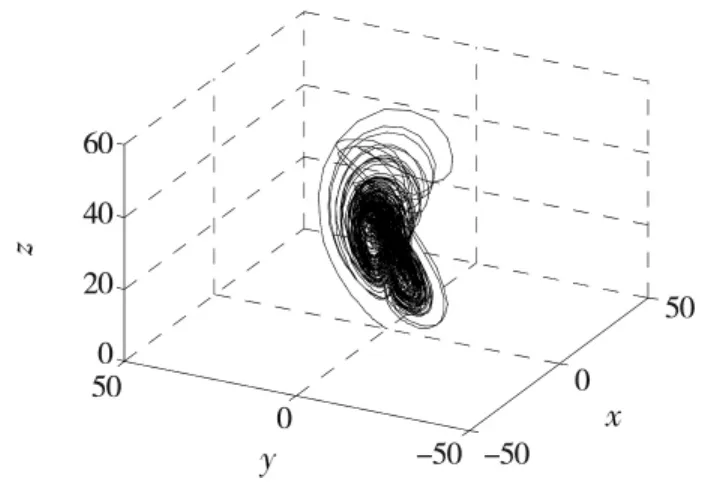
图1 系统(1)的混沌相图
1 系统模型稳定性分析
系统模型如下[11]
其中,a,b,c,m 是实参数,当 a=36,b=3,c=20,m=7时,系统(1)存在超混沌吸引子,如图1所示。
当b>0时,系统(1)有唯一平衡点O(0,0,0,0),下面讨论平衡点O的稳定性问题。系统(1)在平衡点O的线性化矩阵为

相应的特征方程为

式(2)有一个负根λ3=-b<0,由Routh-Hurwitz矩阵知:
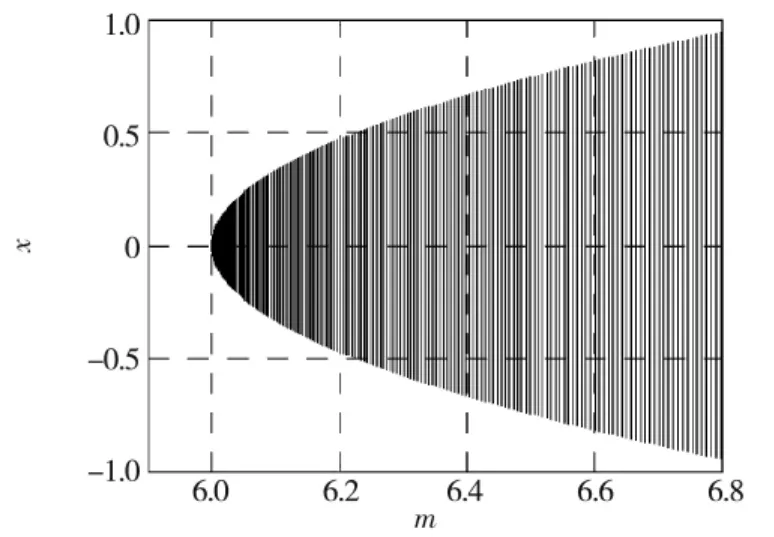
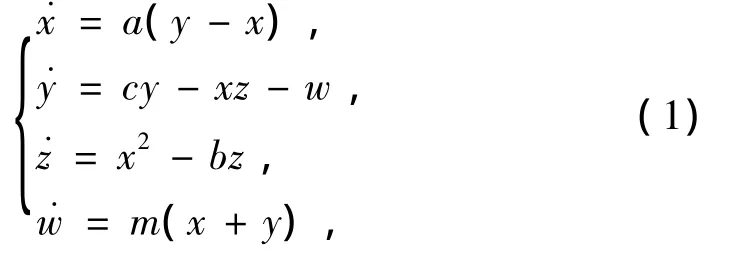
图2 系统(1)在O处的分岔图
图3 m=5系统(1)在分岔点O处的相图
2 系统Hopf分岔类型判定
当b=3,a=2,c=-1,m=6时,系统(1)在平衡点O处的线性化矩阵为
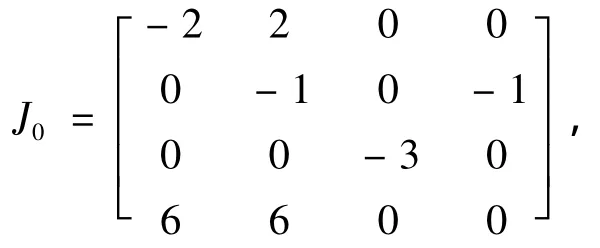
对应的特征值为

其中ω0=2.828 4。下面讨论系统(1)在平衡点O的Hopf分岔类型。
对系统(1)两端作线性变换(x,y,z,w)T=Ty,其中 y=[y1,y2,y3,y4]T,T 为分岔点 O 处导算子的特征值对应的特征向量的实部和虚部所组成的变换矩阵。

变换后可得系统(1)的Poincare规范形

其中:hi(y)(i=1,2,3,4)为包含 y1,y2,y3,y4,m1的非线性部分,m=m1+6。根据中心流形定理,可设式(3)的中心流形为如下形式:


其中:U(y2,y3)和V(y2,y3)为含y2,y3的更高阶项。(0,0)是式(5)唯一有意义的平衡点,由文献[12]知,式(5)与系统(1)有相同的非线性特性,研究式(5)在(0,0)的稳定性及分岔类型相当于研究系统(1)在相应平衡点O处的稳定性及分岔类型。计算式(5)的Hopf分岔稳定性指标

计算得 β2=-0.014 1 < 0。所以,式(5)在(0,0)处发生超临界Hopf分岔,由此可判定系统(1)在分岔点O处发生超临界Hopf分岔,系统O产生等幅振荡,出现稳定极限环,如图4所示,仿真初值为(x0,y0,z0,w0)=(0.5,0.1,0.1,0.1)。
3 分岔控制
不改变原系统的Hopf分岔点,对系统(1)施加基于Washout滤波器辅助的非线性控制器得:
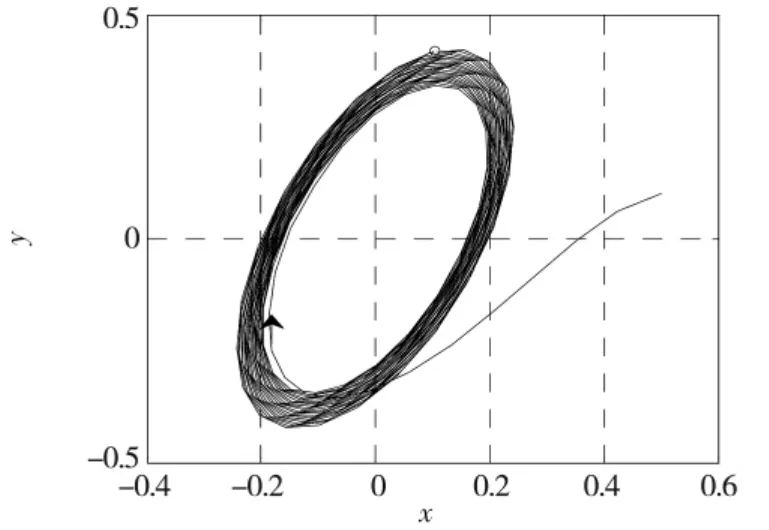
图4 m=6.2时,系统(1)在平衡点O处和相图
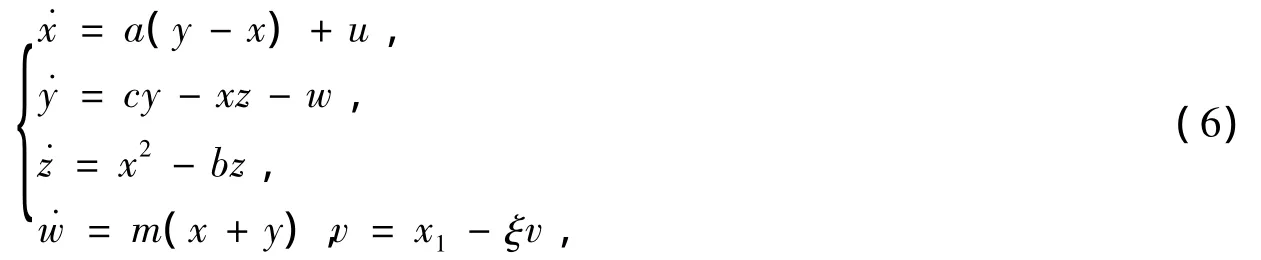
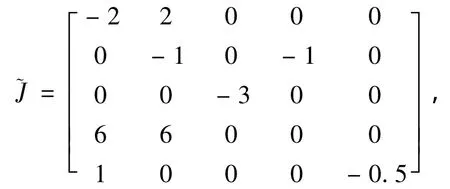
其中 u=k(x1-ξv)3,非线性控制器没有改变原系统的平衡点 O,系统(6)有平衡点~O(0,0,0,0,0)。取b=3,a=2,c=-1,ξ=0.5,m=6,则系统(6)在平衡点 ~O 处的线性化矩阵为
对应的特征值为

变换后可得系统(6)的Poincare规范形
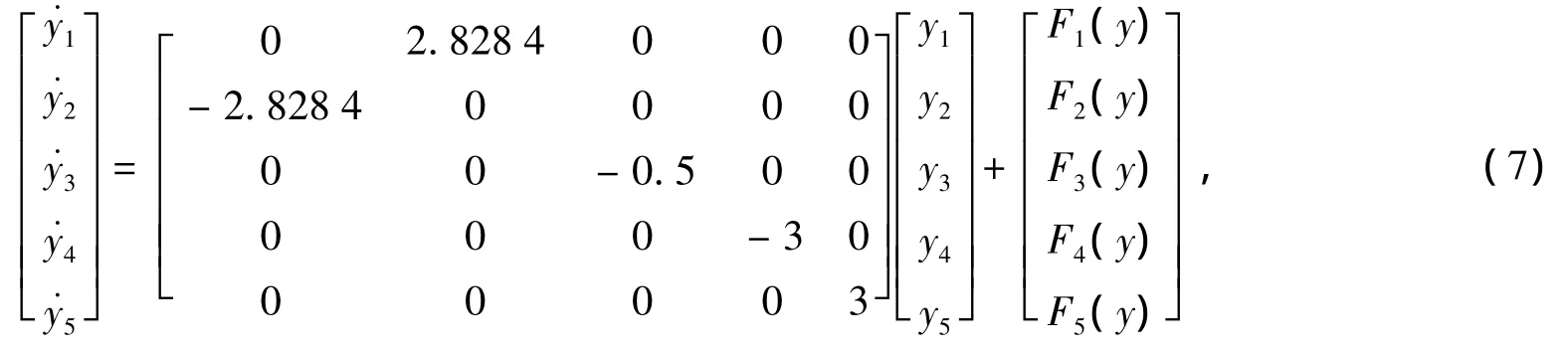
其中 hi(y)(i=1,2,3,4,5)是包含 y1,y2,y3,y4,y5,k 的非线性部分。
根据Hopf分岔理论计算系统(6)的Hopf分岔稳定性指标β[13]2

其中

根据式(7)及文献[13],分别计算各个特征量得

将以上结果代入式(8)和式(9)得

当k<0.3时,β2<0,系统(6)发生超临界Hopf分岔,在平衡点附近系统产生等幅振荡,出现稳定极限环,如图5所示。当k=0时,β2<0,即在施加控制器前系统的分岔类型为超临界,这与2中所分析的结果相符合。另外,极限环幅值(振动幅值)会随着控制参数k的减小而减小,见图5~图6。当k>0.3时,β2>0,系统(6)发生亚临界Hopf分岔,在平衡点附近系统产生增幅振荡,出现不稳定极限环,如图7所示。其中,仿真初值为(x0,y0,z0,w0,v0)=(0.5,0.1,0.1,0.1,0)。
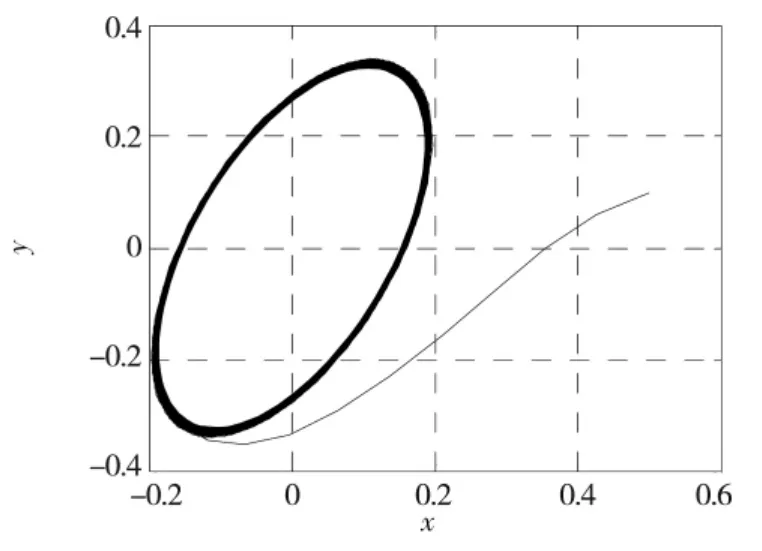
图5 k=0.2时,系统(6)在分岔点~O处的相图
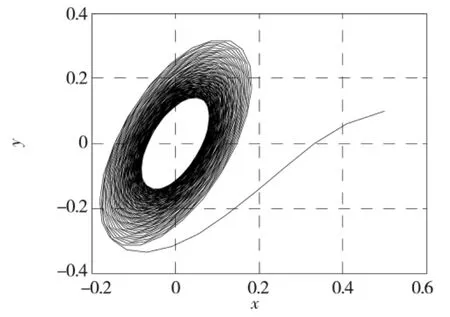
图6 k=-2.5时,系统(6)在分岔点~O处的相图
由以上分析知,当非线性控制参数满足一定条件时,可以改变原系统的Hopf分岔类型和极限环幅值大小,从而实现系统的极限环幅值控制。

图7 k=0.9时,系统(6)在分岔点~O处的相图
4 结 论
本文主要研究了一个新的四维非线性系统的Hopf分岔行为和极限环幅值控制问题。通过中心流形理论判定系统的Hopf分岔类型,然后对系统施加基于Washout滤波器辅助的非线性控制器,讨论了控制器对Hopf分岔类型及极限环幅值的影响。通过讨论得出结论,当非线性控制参数满足一定条件时,可改变原系统的Hopf类型,并能控制极限环幅值的大小。文中用Matlab软件对理论结论进行数值仿真,仿真结果与理论分析结果一致。
[1]ChenGuanrong,T.Ueta.Yet another chaotic attractor[J].International Journal of Bifurcation and Chaos,1999,9(7):1465-1466.
[2]Lü Jinhu,Chen Guanrong.A new chaotic attractor coined[J].International Journal of Bifurcation and Chaos,2002,12(3)659-661.
[3]ChuYanddong,Li Xianfeng,Zhang Jiangang,etal.Nonlinear dynamics analysis of a new autonomous chaotic system[J].Journal of Zhejiang University(Science A),2007,8(9):1408-1413.
[4]PangShou-Quan,Liu Yong-Jian.A new hyperchaotic system from the Lü system and its control[J].Journal of Computational and Applied Mathematics,2011,235(8):2775-2789.
[5]AntonioAlgaba,Fernando Fernández-Sánchez,Manuel Merino.Centers on center manifolds in the Lorenz,Chen and Lü systems[J].Commun Nonlinear Sci Numer Simulat,2014,19(4):772-775.
[6]DengKuibiao,Yu Simin.Hopf bifurcation analysis of a new modified hyperchaotic Lü system[J].Optik,2013,124(23):6265-6269.
[7]刘洪伟.一类Silnikov方程的Hopf分岔控制[J].东北电力大学学报,2014,34(4):75-79.
[8]吴金龙,张焰.一种求解电力系统动态电压稳定Hopf分岔点的新型混合方法[J].东北电力大学学报,2008,28(4):18-24.
[9]张中华,付景超,李鹏松.基于中心流形理论的小水电并网系统Hopf分岔分析[J].振动与冲击,2015,34(2):50-54.
[10]高智中.一个新的非线性系统及其超混沌控制[J].浙江大学学报:理学版,2012,39(3):303-307.
[11]Du Wenju,Zhang Jiangang,Yu Jianning,et al.Hopf bifurcation analysis in a Novel nonlinear system[C].Proceedings of the 32nd Chinese Control Conference,Xi’an,2013,26-27.
[12]张琪昌,王洪礼,竺致文,等.分岔与混沌理论及应用[M].天津:天津大学出版社,2005,147-150.
[13]Hassard,B.D.Theory and Application of Hopf Bifurcation[M].Cambridge University,1981.
