融合Radon变换与旋转投影的车牌垂直校正方法
2015-02-18朱亚萍田呈培杨成忠尚晓波
朱亚萍,田呈培,杨成忠,尚晓波
(杭州电子科技大学自动化学院,浙江 杭州 310018)
融合Radon变换与旋转投影的车牌垂直校正方法
朱亚萍,田呈培,杨成忠,尚晓波
(杭州电子科技大学自动化学院,浙江 杭州 310018)
摘要:相对于水平校正,车牌垂直校正是一难点。旋转投影法计算量大,校正成功率高,而Radon变换法耗时少,校正成功率比较低。针对以上特点,将两种方法进行融合,在车牌左右半边分别用Radon变换求取垂直倾斜角,根据两者差值绝对值与某固定阈值的关系,决定采用何种方法获得车牌垂直倾斜角并校正。实验证明,与旋转投影法相比,方法既提高了校正成功率,又减少了算法运行时间。
关键词:车牌;垂直校正;Radon变换;旋转投影
0引言
汽车牌照自动识别系统是智能交通系统的重要组成部分,在图像采集时,由于拍摄距离、拍摄角度等原因,获取的车牌都有不同程度的倾斜,这不利于后续字符分割与识别等工作的展开。在实际情况中,水平倾斜与垂直倾斜同时存在。目前对于水平校正的研究较多,也取得了较好的效果,主要方法有Hough变换法[1]、Radon变换法[2]、K-L展开式法[3]等方法。而由于车牌高度有限,直线特征不明显等原因,垂直校正受到很大限制。Radon变换法[4]、旋转投影法[5]是两种常见的垂直校正方法。本文首先对这两种方法分别进行实验测试,随后针对两种方法各自的特点,将两种方法进行融合以改善校正效果,最后对融合后的算法进行实验测试以验证算法性能。
1校正方法研究
1.1 边缘检测方法
边缘检测是Radon变换法的重要一步,其结果直接影响后续的垂直校正效果。边缘是指图像局部强度变化最显著的部分,常利用边缘邻近一阶或二阶导数变化规律进行检测。
Canny算子和Sobel算子是两种常见的边缘检测算子。通过大量测试发现,当Sobel算子的阈值较大时,边缘提取不完整。特别对于整体较暗的车牌图片,该现象更为明显。随着阈值的减小,情况得到改善,但引入了更多噪点。相对于Sobel算子,Canny算子提取的结果比较稳定,对各种情况有较强的适应性。故本文选择Canny算子提取边缘。
1.2 Radon变换法
基于Radon变换的车牌垂直校正的完整算法流程如图1所示。

图1 Radon变换法算法流程图
根据上述算法,对车牌原图图2经过水平校正以及字符区域划定之后的车牌图像进行垂直校正,校正结果如图3所示,其中图3(a)对应的垂直倾斜角为11°,图3(b)对应的垂直倾斜角为-7°。从图3中看出,本文方法对这两张图片的处理结果较为理想。

图2 车牌原图

图3 Radon变换法垂直校正结果
1.3 旋转投影法
文献[5]提出一种基于旋转投影的车牌垂直校正方法,该方法依次以1°为增量将图像仿射变换,并将二值图沿垂直于x轴的方向进行投影。每变更1次角度,如果是蓝底车牌,就统计图像一列像素全是0的列数之和,如果是黄底车牌,就统计图像一列像素全是1的列数之和。当变换角度等于车牌的垂直倾斜角度时,蓝底车牌像素值全为0的列数最多,黄底车牌像素值全为1的列数最多,由此确定垂直倾斜角。其算法流程如图4所示。
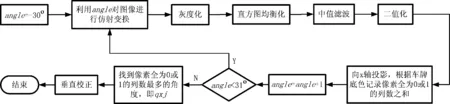
图4 旋转投影法算法流程图

图5 旋转投影法垂直校正结果
2实验测试
用150张经过水平校正以及字符区域划定之后的车牌测试算法性能,其中蓝底车牌100张,黄底车牌50张。实验均是在Intel core i3处理器2.13 GHz的PC机,Matlab平台上进行的。特别指出,普通Radon变换法是对整幅图片进行变换,称之为Radon变换法1。把一张图片分成左右两半,如图6所示,对左右两半分别用Radon变换求垂直倾斜角,并用两者的平均值作为整个车牌的垂直倾斜角,这种方法称之为Radon变换法2。

图6 对车牌左右分割
校正成功与否主要通过人工判定,允许一定误差存在,但在整个实验过程中,保证了前后判定的一致性。整体测试结果如表1所示。
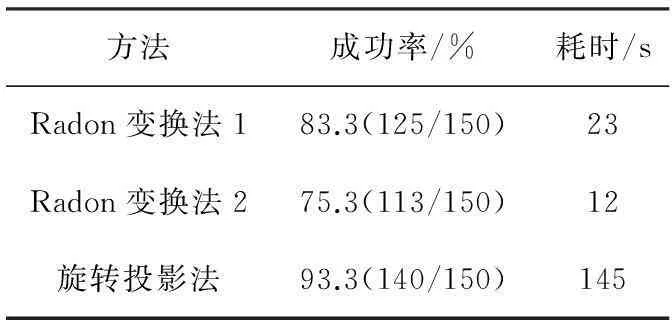
表1 传统垂直校正算法实验结果
测试结果表明,对于垂直校正,旋转投影法最为有效,但是计算量大;Radon变换法1的校正成功率与耗时都适中;Radon变换法2的校正成功率较低,但非常省时。
当车牌包含的“E”、 “ H”、 “4”、“1”等字符较多时,Radon变换法2校正效果较好,如图7所示,此类字符具有较明显的垂直直线特征。

图7 Radon变换法2垂直校正结果
对于部分Radon变换法2处理失败的图片,旋转投影法取得了较好效果,如图8所示。其中图8(a)、图8(b)为Radon变换法2处理失败的图片,图8(c)、图8(d)为旋转投影法对相同图片的处理结果。从图8中看出,对于该部分图片,旋转投影法更为有效。
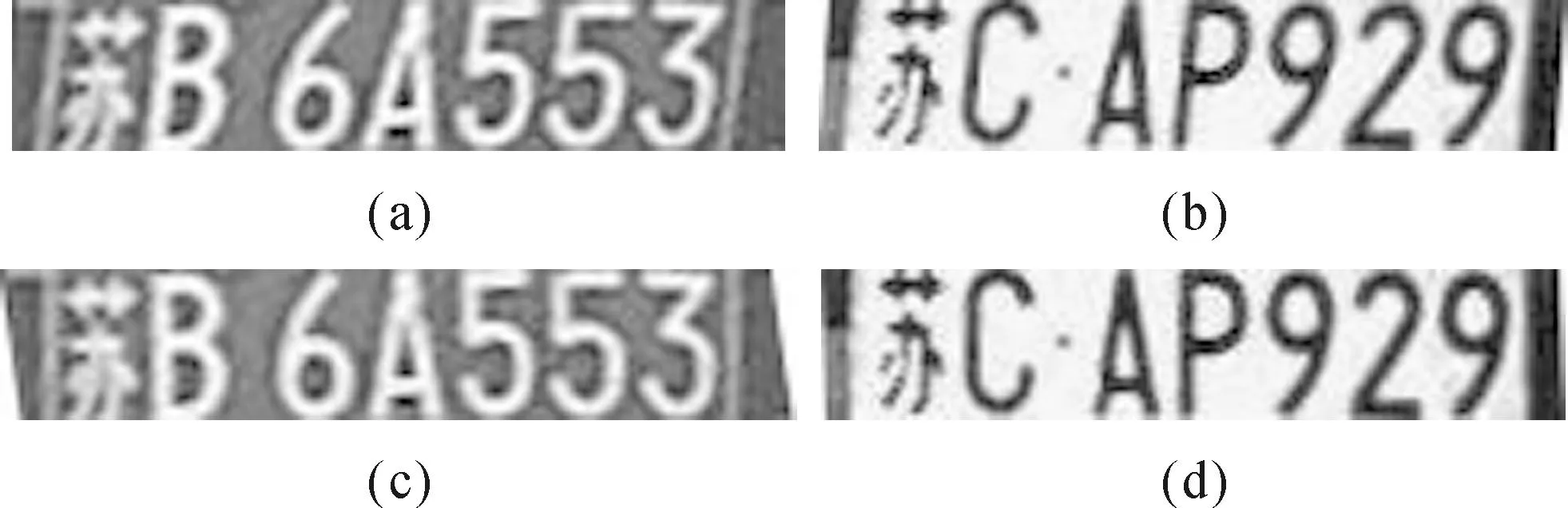
图8 Radon变换法2与旋转投影法校正结果对比1
同样,也有部分图片用Radon变换法2处理效果更好,如图9所示。其中图9(a)为Radon变换法2的处理结果,图9(b)为旋转投影法的处理结果。

图9 Radon变换法2与旋转投影法 校正结果对比2
综上所述,这两种方法有一定互补关系。结合各个算法的特点,将Radon变换法2与旋转投影法进行融合,目的是各取所长,提高算法的校正成功率又降低耗时。
3算法融合
将Radon变换法2与旋转投影法进行融合,当利用Radon变换测得的左右两半的垂直倾斜角差值绝对值小于某固定阈值T时,用两者平均值作为最终求得的倾斜角并进行垂直校正,否则用旋转投影法求取倾斜角并校正。算法流程如图10所示。

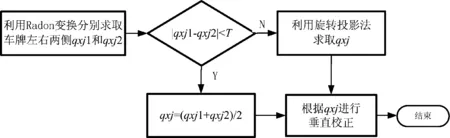
图10 融合之后的算法流程图
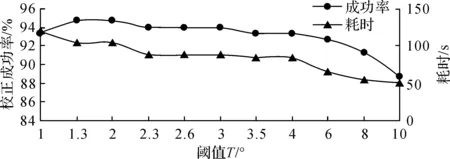
图11 融合算法整体测试结果
选取其中4组测试结果的详细情况如表2所示。
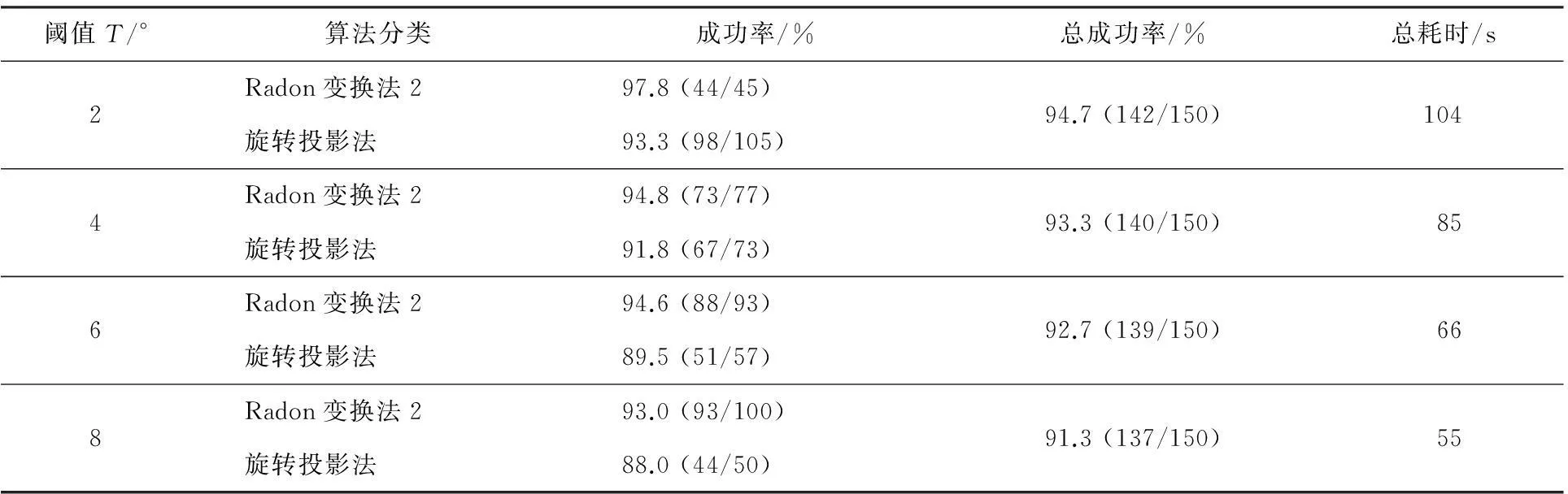
表2 融合算法部分实验结果
分析表2可知,选取T为2°时,有阈值限制的Radon变换法2的校正成功率为97.8%,大大高于没有阈值限制的Radon变换法2的75.3%。即单纯利用Radon变换获取图像左右两半的倾斜角,误差较大,鲁棒性不强,但若两个值非常接近,则说明获取的两个倾斜角数值可靠性高,可以信赖。又考虑到Radon变换法2运算量小的特点,对图片首先考虑采用Radon变换法2处理,若不符合阈值条件,改用旋转投影法。另外,随着阈值增大,两个算法的成功率以及总成功率都在下降,但总耗时也在减少。
4结束语
本文将Radon变换法与旋转投影法进行融合,实验结果表明,与旋转投影法相比,融合算法降低了耗时,并提高了校正成功率。在上述研究的基础上,采用并行加速等方法进一步减小算法耗时成为后期研究的重点。
参考文献
[1]Fang J,Dai S G.A Vehicle License Plate Slant Location and correction method Based the Characteristics oF License Plate[C]//Intelligent Control and Automation (WCICA),2012 10th World Congress on.Beijing:IEEE,2012:42-46.
[2]吴丽丽,余春艳.基于Sobel算子和Radon变换的车牌倾斜校正方法[J].计算机应用,2013,33(S1):220-222.
[3]吴一全,丁坚.基于K-L展开式的车牌倾斜校正方法[J].仪器仪表学报,2008,29(8):1690-1694.
[4]Gong L X,Hu H P,Bai Y P.Vehicle License Plate Slant Correction Based on Mathematical Morphology and Radon TransFormation[C]//Natural Computation (ICNC),2010 Sixth International ConFerence on.Yantai:IEEE,2010:3457-3461.
[5]李文举,梁德群,崔连延,等.一种新的车牌倾斜校正方法[J].信息与控制,2004,33(2):231-235.
A Vertical Tilt Correction Algorithm For License Plate Based on
Radon TransFormation and Rotation Projection
Zhu Yaping, Tian Chengpei, Yang Chengzhong, Shang Xiaobo
(SchooloFAutomation,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
Abstract:Comparing to the horizontal correction method, the vertical correction method is a more diFFicult problem in license plate recognition. Rotation projection requires considerable calculations, which leads to a higher success rate, while Radon transFormation requires less time and the success rate is lower. A combination oF these two methods is Feasible. It is possible to use Radon transFormation to calculate the two vertical tilting angles oF both sides oF the license plate, and then to choose one oF the two methods to determine the exact tilting angle. This is accomplished in accordance with the relationship between the absolute value oF the diFFerence between the two angles and one Fixed threshold. The experimental results show that this new method produces an improvement in the success rate oF correction, and a reduction in the operational time involved.
Key words:license plate; vertical correction; Radon transFormation; rotation projection
中图分类号:TP391
文献标识码:A
文章编号:1001-9146(2015)03-0048-04
作者简介:朱亚萍(1962-),女,江苏张家港人,教授,检测技术与自动化装置.
收稿日期:2014-11-10
DOI:10.13954/j.cnki.hdu.2015.03.009