数模随动系统检测仪的设计
2015-01-27杨文明
杨文明
(中国船舶重工集团公司 第七一三研究所,河南 郑州 450015)
0 引言
随着舰载武器系统自动化程度的快速提升以及某中口径舰炮的批量装舰,舰队的装备保障任务越来越繁重,迫切需要一种功能强、易操作、便于携带的自动检测设备,既能为该舰炮提供实时、快速、准确的射前检测及维修技术保障,又能用于舰炮的日常模拟训练,可以节约大量的人力、物力和财力。
数模随动系统检测仪依托先进的电子技术和计算机技术,充分采用硬件和软件成熟技术的基础上,利用可靠性较高的便携式处理器模块,通过一体化设计和软硬件架构,全面覆盖检测的功能要求,提高技术保障能力和自动检测能力,满足该舰炮在维修保障及模拟训练等方面的需求。
1 总体方案设计
如图1 所示数模随动系统检测仪要求控制计算机性能较高、运行速度快、控制接口齐全、易于扩展,并采用一体化虚拟仪器的设计思想,用加固计算机作为主控单元,各功能模块根据实施方式不同分别采用扩展硬件插板或软件方式实现,整台设备实现一体化,所有扩展硬件功能板将插入计算机的扩展插槽中,输出及采样信号通过计算机外部接口和舰炮随动系统进行连接。

图1 数模随动系统检测仪组成框图Fig.1 Block diagram of digit/analog servo system detector
数模随动系统检测仪的总体设计采用模块化结构,检测仪由一台通用的微机外加扩展箱组成,计算机的选用,可以采用单片机、便携机、工控机、微型机等选择方案。由于单片机的数据处理功能不如微型机,而便携机总线进一步扩展较困难,工控机价格比较昂贵,显示功能又比不上微机,普通微机在运算速度、图形显示效果、价格、维修配件更换方便性、作其他用途的多用性等方面具有优势,由于检测仪装备对象主要是舰队及维修厂,综合考虑决定采用加固微机。主机通过总线与外部扩展箱相连,设备的其它主要插件板全部插在扩展槽中,通过输出、输入电缆与舰炮控制系统相连。
2 控制系统设计
2.1 控制微机设计

图2 数模随动系统检测仪硬件原理框图Fig.2 Schematic block diagram of digit/analog servo system detector
控制微机的主要插件板和组成部分如图2 所示。主要由:①422/485 串口板:该板由转换芯片组成,为检测仪和舰炮控制系统之间网络数据的发送提供统一的时间基准;②网络通讯板:该板由标准集成网卡组成,具有10M/100M 自适应功能,可实现向舰炮控制系统提供火炮的高低和方位瞄准全角信息及相关报文信息,并可接收舰炮控制系统的架位信息和状态信息报文;③开关量输入/输出板:该板采取物理光电隔离措施,实现输入输出信号的采集和转换,完成隔离和放大,实现舰炮的状态指示和监控功能;④数模、模数转换板:具有16 路A/D 转换和4 路D/A 转换通道,其A/D 部分的功能是在微机控制下进行不同通道输入信号的数据采集,D/A 部分将微机输出的数字正馈信号转换为规定波形的模拟正馈信号;⑤数字/自整角机转换板:将连续跟踪输入的14位二进制数据,转换后输出高精度的自整角机信号,该检测仪选用 HDSC2814 数字—自整角机转换器;⑥轴角/数字转换板:轴角/数字转换板(SDC 转换板)主要完成舰炮的角位置到数字信号的转换,将自整角机发送的轴角信号转换成14 位数字全角度编码信号提供给控制计算机,解决了与主机的接口、转换精度和速度、各种精粗比时的角度组合纠错等问题;⑦电源板:对115V 400Hz 交流电压进行整流和稳压,给轴角/数字转换板提供参考电压;⑧接插件及电缆:由接插件,输入、输出电缆等组成。
2.2 模数转换板设计
模数转换板采用SDC2754 模块,该模块的工作方式是跟踪方式,因此又称“跟踪转换器”。SDC2754 模块内部框图如图3 所示。来自自整角机的三相绕组信号为:

图3 SDC 原理框图Fig.3 Schematic block diagram of SDC
VS1-S2=E0sinθsinωt
VS2-S3=E0sin(θ+120°)sinωt
VS3-S1=E0sin(θ+240°)sinωt
其中θ 为自整角机输入轴的转角,ω 为励磁频率。连接到转换器的S1、S2 和S3 端,经微型变压器(Scott 变压器)后将三相变为两相。
V1=KE0sinθsinωt
V2=KE0cosθsinωt
经高速数字sin/cos 乘法器完成了如下运算:
KE0sinθsinωt·cosφ
KE0cosθsinωt·sinφ
其中φ 为数字角度。这些信号经误差放大器得误差电压:
Ve=KE0sinθsinωtcosφ-KE0cosθsinωtsinφ
=KE0sinωt(sinθcosφ-cosθsinφ)=KE0sinωtsin(θ-φ)
经相敏检波后将载频信号sinωt 去掉得到误差电压sin(θ-t),然后经压控振荡器转换成脉冲,由可逆计数器获得数字角度φ。当θ=φ,误差电压为0。可见这是一个闭环跟踪系统。系统中滤波积分中有一个积分环节,可逆计数器输出的的数字量是对输入脉冲频率的积分,因此闭环系统为Ⅱ型系统。如果输入角度θ 固定不变,则输出φ 将恒等于θ;如果输入时以均匀角速度变化,则输出φ 也变化,并且代表着一个相同的角速度,任一时刻输出φ 与输入θ 是相同的。
2.3 数模转换板设计
数模转换板选用HDSC2814 数字—自整角机转换器,该转换器由以下几部分组成:参考变压器、象限变换、正余弦乘法器、功率放大器和输出变压器等五部分。原理框图如图4 所示。

图4 DSC 转换器原理框图Fig.4 Schematic block diagram of DSC converter
输入参考信号经电子变压器隔离降压,给正余弦乘法器提供参考信号;数字全角量输入,低12 位连接正余弦乘法器,高2 位连接到象限选择,以形成全象限的正、余弦信号,然后用功率放大器放大后,再经输出变压器隔离、升压后转换成三线三相自整角机模拟信号输出,即:V0=E0sinωt,其中V0为参考电压的输出,E0为参考电压,为有效值。
VS1-S2=E0sinθsinωt
VS2-S3=E0sin(θ+120°)sinωt
VS3-S1=E0sin(θ+240°)sinωt
2.4 软件编制
控制软件是控制系统的核心,模数随动系统检测仪的软件采用Windows 支持下的可视化程序设计,它使用了Microsoft Windows 图形用户界面的许多先进特性和设计思想,采用了弹性可重复利用的完整的面向对象语言。软件设计采用先进的软件编程工具,其主要部分为测控模块、软件示波器、数据库应用程序、在线帮助等几个模块。通过精心的设计为检测仪的操作使用提供了良好的人机界面,使用时用鼠标或键盘通过菜单或命令按钮可方便的进行命令的执行和参数的输入。设计了先进的输出角度信号指针式动画实时显示程序,和可放大缩小的示波器显示输出,用于显示发送信号波形及采集信号波形。整个软件设计保证了仪器具有完备的自检、发送、采集、分析、处理、存储、显示、查询、打印等功能,软件部分主要框架如图5 所示。
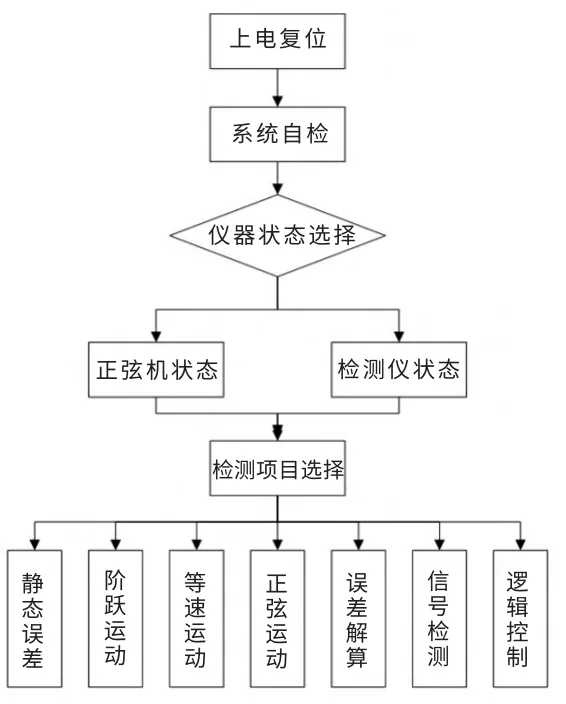
图5 控制软件模块图Fig.5 Module diagram of control software
3 结束语
模数随动系统检测仪是融入虚拟仪器理论技术研制开发的一种专用设备,其基本构架为一台高性能的计算机系统,配置相应输入、输出卡以实现特定的检测功能。该检测仪采用成熟的计算机作为硬件载体,选用Windows 支持下的可视化程序设计作为软件平台,自动化程度高,功能强大,测量精确,而且成本低,操作简便,易于携带。
该检测仪在离线模拟训练、辅助快速故障定位等方面取得显著创新,既能为某中口径舰炮提供实时、快速、准确的技术保障和检测维修,又能用于舰炮的日常模拟训练,符合设计要求,满足舰队的应用需求,有效保障舰队的维修任务。
[1]孔祥营,柏桂枝. 嵌入式实时操作系统VxWorks 及其开发环境Tornado[M]. 北京:中国电力出版社,2002.
[2]罗国庆.Vxworks 与嵌入式软件开发[M].北京:机械工业出版社,2003.
[3]胡平安,郭菊珍.PC/104 在导航工控机中的应用[J].计算机测量与仿真,2003,11.
[4]禹兴华,吕永健.基于PC/104 的机载BIT 设备自动测试系统开发[J].测控技术,2007,3.
