车辆主动悬架的模糊PID控制仿真
2015-01-27景园,赵强,张娜
景 园,赵 强,张 娜
(东北林业大学 交通学院,黑龙江 哈尔滨 150040)
0 引言
不同于固定阻尼和刚度系数的车辆被动悬架,阻尼可调的主动悬架不仅能够适应车辆载荷、行驶速度以及路面的不平程度变化达到有效减震的目的,还可以调节刚度控制悬架侧倾。从结构而言,主动悬架实际是一个主动力的发生器。因此,控制策略的优劣对主动悬架控制效果有极大影响。其中利用现代控制算法中应用比较广泛的研究有:陈志林利用了渐近稳定自适应控制[1];Yoon Y S 等利用最优控制算法得到二次型性能指标[2];孙涛在电流变液磁流变半主动悬架上试验了模糊PID 控制[3]等等。其中PID 控制具有原理简单、使用方便等优点应用最广泛,而车辆主动悬架控制系统为多自由度、多参数的非线性系统,常根据经验法不断调试确定PID的参数。本文选用模糊PID 控制,将模糊推理运用于PID 参数的整定,以根据经验制定控制规则得出控制决策表, 然后求出控制量的大小,不再需对控制对象精确建模,并通过Matlab/Simulink 进行了建模及仿真分析。
1 悬架模型
1/4 车辆主动悬架理想模型如图1 所示。其模型根据牛顿定律满足以下动力方程:
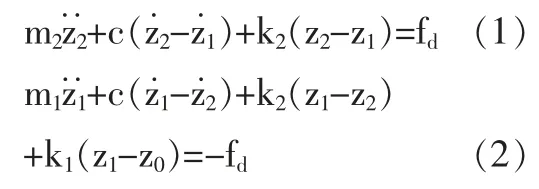

图1 二自由度单轮动力学模型Fig.1 Single wheel dynamics model of two degrees of freedom
式中:m1—主动悬架非簧载质量(kg);m2—主动悬架簧载质量(kg);k1—轮胎径向刚度系数(N/m);k2—悬架刚度系数(N/m);c—减振器的阻尼系数(Ns/m);z2—车身簧载质量的垂直位移(m);z1—车身非簧载质量的垂直位移(m);z0—路面激励(m);fd—作动器的输出力(N)。主动悬架的控制是通过控制作动器的出力fd,应用于模糊PID 控制、PID 控制及被动控制,在被动中作动器产生的fd始终为0。
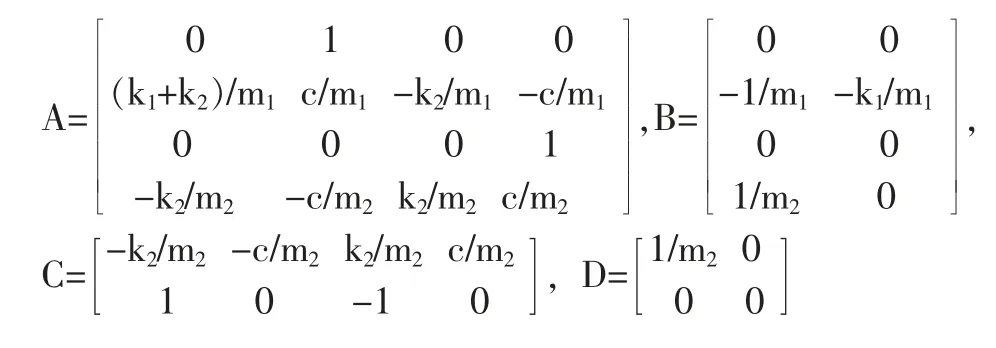
取状态变量X=[x1,x2,x3,x4]T,其中x1=z1,x2=1,x3=z2,,取输入向量U= [fdz0]T,取悬架加速度、悬架动挠度两个性能指标作为输出变量,即,系统的状态方程可表示为:

式中:
2 参数自整定模糊PID 控制器设计
控制系统结构主要有参数可调的PID 和模糊控制系统两部分组成,其结构如图1 所示:模糊控制以误差及误差变化率为输入,通过模糊化、模糊控制算法和模糊判决对PID 控制的三个参数kp,ki,kd 进行整定微调,得到Δkp,Δki,Δkd;PID 控制器以误差为输入,通过kp,ki,kd 三个参数的调节,输出到被控系统车辆悬架,其中r(t)=0。PID 控制器的算式为[4]:

式中:kp—比例控制系数;ki—积分时间常数;kd—微分时间常数。
3 仿真分析
利用Matlab/Simulink 仿真软件,根据本文提到的二自由度1/4 车辆悬架动力学模型,在Matlab/Simulink 仿真平台上,搭建主动悬架系统的被动控制、PID 控制、FuzzyPID 控制仿真模型,其中FuzzyPID 控制的具体实现参见图2。其中悬架系统的参数,如表1 所示。仿真响应曲线如图3 所示。
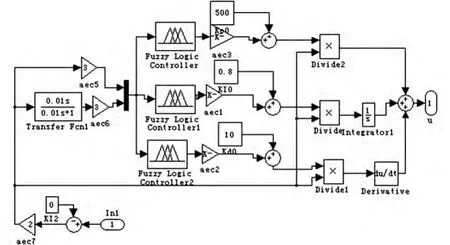
图2 FuzzyPID 控制器模型Fig.2 FuzzyPID controller model
由图3 可以看出:相对于主动悬架的被动控制、PID 控制,模糊PID 控制使车辆的簧载质量加速度和轮胎动载荷大幅减小了峰值,大大缓和了路面传来的不同度激振,提高乘坐舒适性;车辆的簧载质量加速度和轮胎动载减小了均方根值,振动幅度小,改善了行驶平顺性;使得车辆的悬架动挠度反而有所上升。作为评价悬架系统的三个指标,簧载质量加速度、悬架动挠度和轮胎动载荷之间存在着相互制约的动态平衡关系,模糊PID 控制并不能同时兼顾,这也是其不足之处。

表1 车辆悬架仿真参数表Tab.1Vehiclesuspensionsimulationparameters
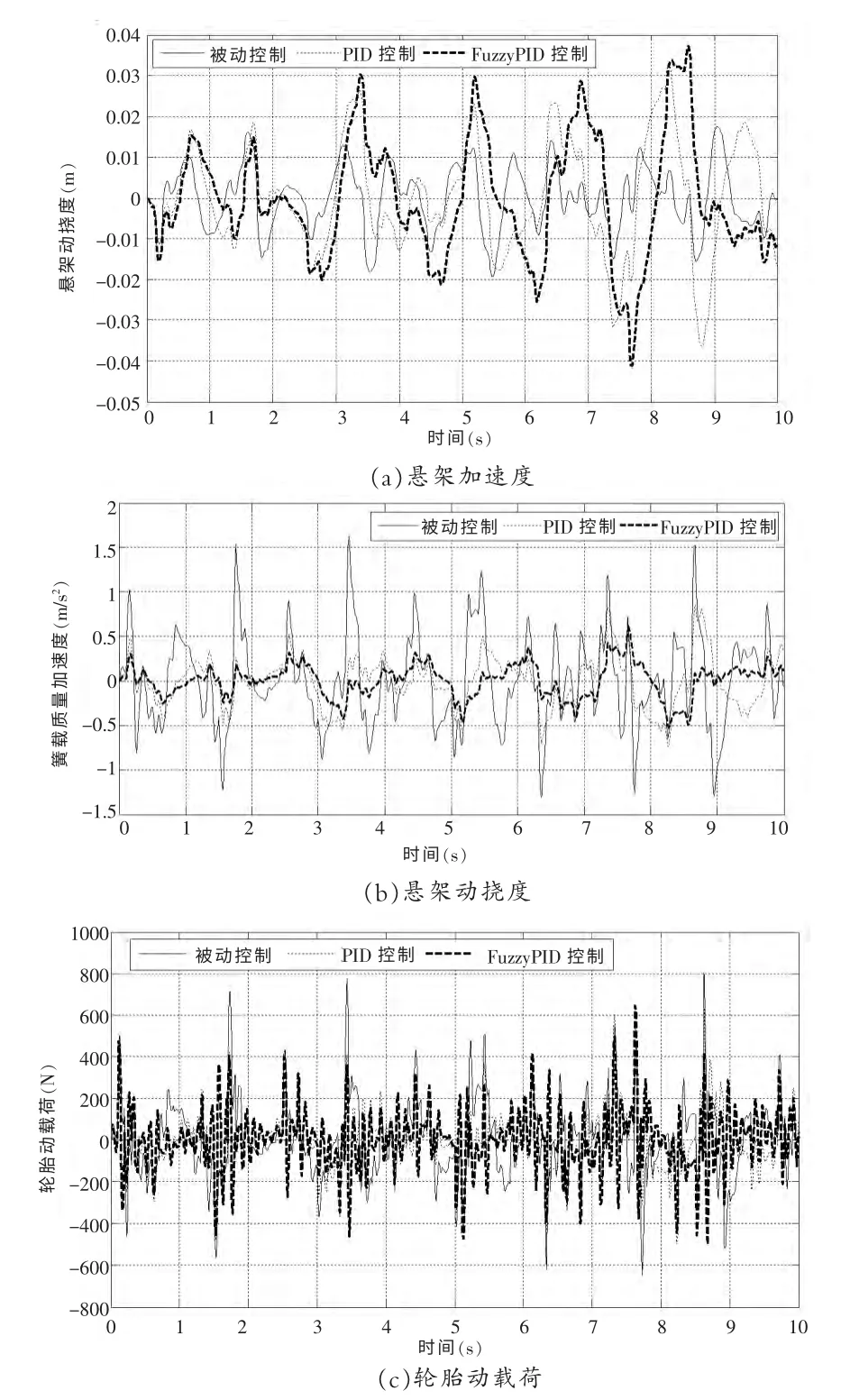
图3 1/4 车辆悬架被动控制、PID 控制、FuzzyPID 控制仿真结果Fig.3 1/4 vehicle suspension passive control, PID control,FuzzyPID control simulation results
4 结论
本文首先以二自由度的车辆1/4 主动悬架系统为研究对象,建立其动力学模型,其次选取模糊PID 控制策略,最后运用MATLAB/Simulink 进行仿真,并通过仿真结果得出,评价悬架系统的主要性能指标车辆的簧载质量加速度、轮胎动载荷均得到明显控制效果,能够有效提高乘坐舒适性,改善了行驶平顺性,这说明采用模糊PID 控制的主动悬架的性能优于传统的被动悬架。
[1]陈志林,金达锋,赵六奇. 汽车主动悬架系统的渐近稳定自适应控制[J]. 清华大学学报(自然科学版),1997,12.
[2]Yoon Y S, Kim H. Feedforward neuro-controlled active suspension using frequency and time-mixed shape performance index. Part1:control logic and performance. Int J of Vehicle Design,1996,2.
[3]孙涛,陈大跃.电流变智能半主动悬架模糊PID 控制[J].汽车工程,2004,5.
[4]苏明,陈伦军,林浩.模糊PID 控制及其MATLAB 仿真[J].现代机械,2004,4.
[5]丁金刚,等.基于模糊控制的车辆主动悬架.仿真研究[J]. 机电产品开发与创新,2012,1.
