四自由度混联机器人构型综合
2015-01-15曹浩峰
曹浩峰, 曹 毅 ,3
(1.江南大学机械工程学院,江苏无锡214122;2.江苏省食品先进制造装备技术重点实验室,江苏无锡214122;3.上海交通大学 机械系统与振动国家重点实验室,上海200240)
机构的创新是机械设计中最重要的环节,机器人机构学是机器人学的基础。在机器人机构设计中最重要的步骤之一就是对机构进行型综合的问题。机构型综合主要内容为机构需要完成的基本功能特性与类型的数学描述、机构的自由度计算原理、机构的运动副类型、机构的支链类型、机构的构型原理与数学描述[1]。
目前主要有5 种型综合的研究方法:基于螺旋理论的约束综合法[2-3]、基于群论的型综合方法[4]、基于图论的综合方法[5]、基于线性变换方法的综合方法[6]和运动综合方法[7-8]。
混联机器人[8]兼具并联机器人和串联机器人的优点,不仅速度高,定位精度高,刚度大,而且工作空间大,末端灵活。随着工业应用需求的增大,混联机器人具有广阔的应用前景,很多机构学者正在大力研究混联机器人。
结合传统串联和并联机器人的结构特点及工作特性,采用现代机构创新设计理论与方法,可以综合设计出一系列混联机器人机构,再从中择优选取作为最终机构。
目前对混联机器人构型的综合理论研究不多见。由于串联机构、并联机构的构型综合方法是混联机构构型综合的基础。文中将混联机器人分成并联模块和串联模块来构型。使用GF集来描述机构末端的移动和转动特征,并基于GF集的混联机器人构型方法,提出四自由度混联机构构型的一般方法。
1 GF 集基本概念
并联机器人机构特性是由其构成的每条支链末端特征决定的。空间运动具有六维(三维移动和三维转动),所以用机器人末端一般特征的集合来描述机器人机构末端特征,称为GF集[9]。GF集由6个元素构成,即

式中,Ti(i = 1,2,3)表示不共面的3 个移动特征;Rj(j = α,β,γ)表示不同时共面的转动特征。
并联机器人机构数综合方程:
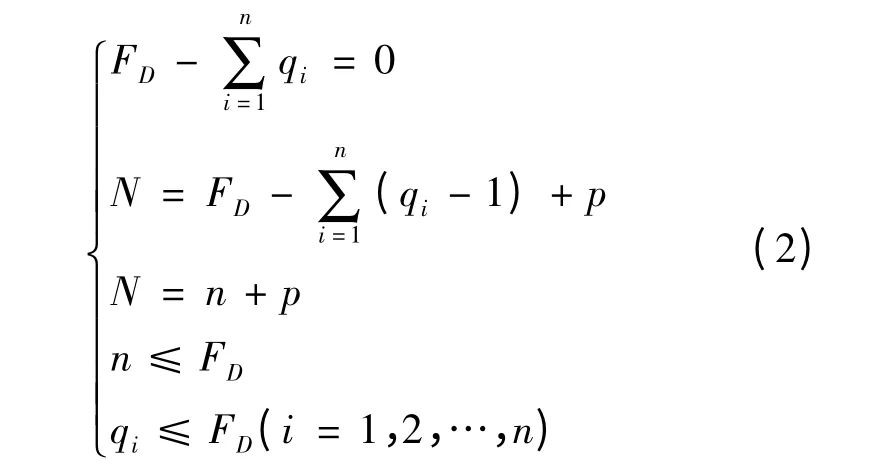
式中:FD为并联机器人末端特征GF集的维数;N 为支链数;n 为具有主动驱动的支链数;qi为主动支链i 上的驱动器数;p 为被动支链数。
根据移动和转动特征的先后顺序,将GF集分为两类:第1 类是移动特征在前转动在后,转动中心随移动特征的变化而变化;第2 类是转动特征在前移动特征在后,转动中心不随移动特征的变化而变化[10]。构造并联机构的一般步骤为明确机构末端的运动特征,设计出具有相应末端特征的支链,并采用GF集求交法则进行综合[11-12]。当设计的机构所有支链结构相同、末端特征相同时,该机构被称为对称性并联机构。文中综合出并联模块均为对称性,这样结构更加简单,刚性更好。
2 四自由度混联机器人构型方法
混联机构是含有至少一个并联机构和一个串联机构,并按照一定方式组合在一起的复杂机械系统。混联机器人是指并(串)联机构的动平台(输出构件)直接作为串(并)联机构的输入构件(静平台),而其末端操作器为串(并)联机构的输出构件(动平台),且末端操作器的自由度数目等于混联机器人总的输入自由度数目[13]。
混联机器人可以由基本的串联机构模块和少自由度的并联机构模块组成,这些模块自身的特点及其组合方式决定了混联机器人的结构性能。用符号表示混联机器人的构成为FD= PKMm+SKMn,它由m 个自由度的并联机构(记作PKMm)和n 个自由度的串联机构(记作SKMn)产生,且d = m + n[13]。
针对四自由度机器人进行构型。机架用B 表示,构型组合方案如表1 所示。
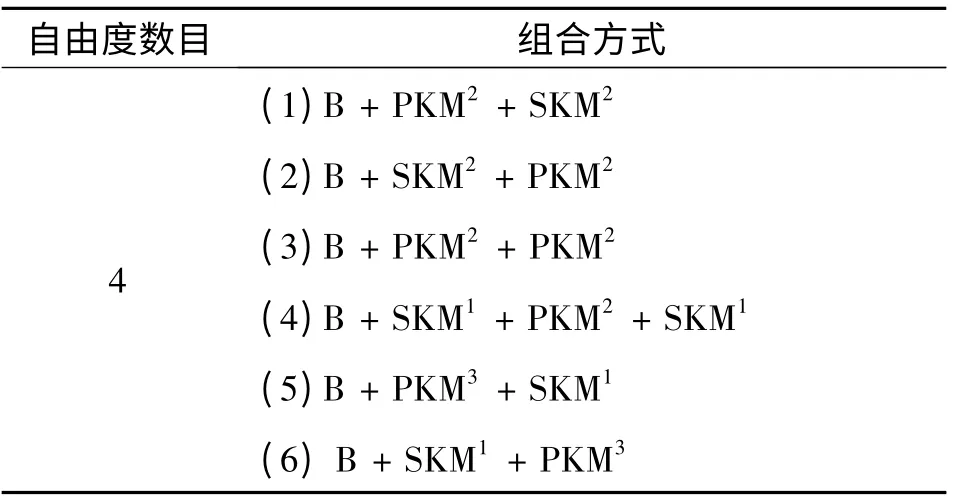
表1 四自由度混联机器人构型组合方案Tab.1 Scheme of the 4-DOF hybrid robot configuration combination
对于混联机器人来说,并联机构模块是核心。这里选择对称的并联机构模块进行构型。首先,给并联机构分配相应方位特性的自由度,从而运用GF集构造出相应的并联机构,然后剩余的自由度用解耦的串联机构补齐[13]。
根据以上阐述,可以总结出混联机构设计方法:(1)分析机构的用途,确定自由度及方位特性;(2)按照表1,确定并联机构和串联机构分配方式;(3)对上述组合方式,分别选择合适的并联机构模块和串联机构,以满足所需方位特性;(4)比较各种方案,从而选出性能优良的机构。
3 四自由度混联机器人并联模块型综合
对少自由度机器人来说,具有三移一转(3T1R)运动的四自由度机器人在工业中应用较为广泛。通常为了得到更大的转动工作空间,把转动作为串联部分,而有时为了得到一个更大的平移自由度,也可以将一个平移自由度作为串联部分。同时,为了满足日益复杂的工业生产线要求,还把一移一转作为串联模块。文中针对四自由度机器人分别把二移、两移一转、三移作为并联模块,然后针对并联模块进行构型。
3.1 二维移动(2T)并联机器人型综合
二维移动并联机器人的末端特征为GF(TaTb0;0 0 0)。由式(2)可得N = 2,n = 2,p = 0,qi=1(i =1,2),即该并联机构由两条主动支链构成,不含被动支链。每条主动支链具有一个驱动。
由于2 个平面型的支链构成一个并联机构并不会增大刚度,所以此处不对2 个平面型支链进行构型。
具有2T 的典型机构类型见表2。序号3.1.1 中2个支链运动所构成的移动平面要相互平行。3.1.2中2 个支链运动所构成的移动平面不但要相互平行,而且2 个转动副转动轴线不平行。3.1.3 中2 个支链运动所构成的移动平面相互平行,2 个转动副转动轴线不共线。3.1.4 中2 个支链运动所构成的移动平面相互平行,2 个转动副转动中心不共线,无平行轴线。3.1.5 中2 个支链运动所构成的移动平面相互平行,2 个转动副转动中心不共线,无平行轴线。

表2 具有GF(Ta Tb 0;0 0 0)型末端特征的典型机构类型Tab.2 Typical types of the mechanism which the terminal characteristics as GF(Ta Tb 0;0 0 0)
3.2 二维移动一维转动(2T1R)并联机器人型综合
2T1R 并联机器人的末端特征有2 种,一种为第一类GF集GF(TaTb0;Rɑ0 0),由式(2)可得N = 3,n = 3,p = 0,qi= 1(i = 1,2,3),即该并联机构由3条主动支链构成,不含被动支链。每条主动支链具有一个驱动;另一种为第2 类GF集GF(Rɑ0 0;TaTb0),由式(2)可得N = 3,n = 3,p = 0,qi= 1(i =1,2,3),即该并联机构由3 条主动支链构成,不含被动支链。每条主动支链具有一个驱动,或者N = 4,n =3,p = 1,qi= 1(i = 1,2,3)。
具有第1 类2T1R 的典型机构类型如表3 所示。3.2.1 中3 个支链运动所构成的移动平面要相互平行,转动副的轴相互平行且垂直于移动平面。3.2.2中3 个支链运动所构成的移动平面要相互平行,第1个转动副的轴相互平行且垂直于移动平面。3.2.3中3 个支链运动所构成的移动平面要相互平行,转动副的转动中心连线垂直于移动平面,其合成的转动副的转动轴线既要平行第3 条支链的一个转动副轴线,也要垂直于移动平面。
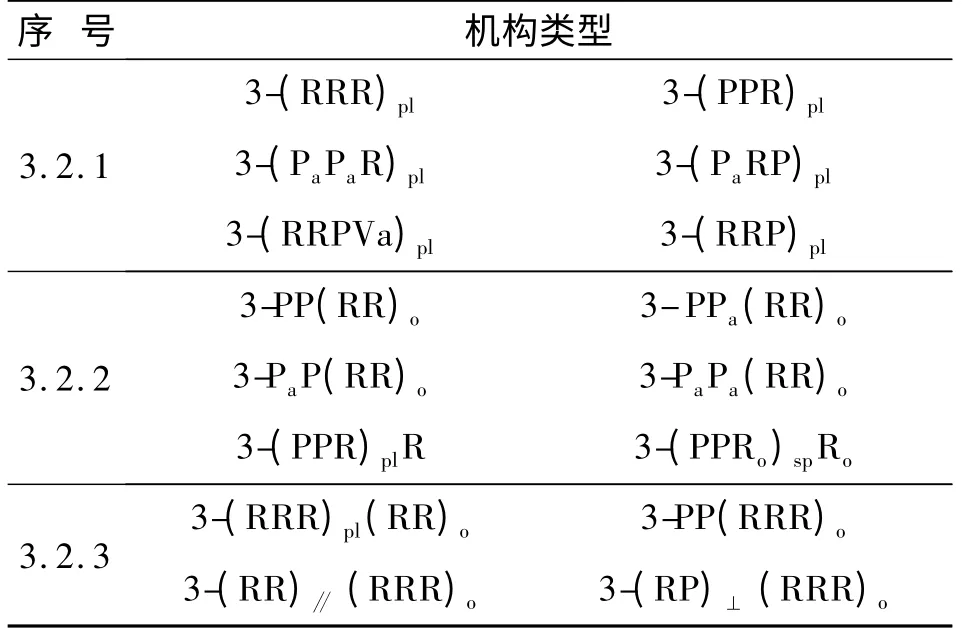
表3 具有GF(Ta Tb 0;Rɑ 0 0)型末端特征的典型对称并联机构Tab.3 Typical symmetrical parallel structures of the mechanism with the terminal characteristics as GF(Ta Tb 0;Rɑ 0 0)
具有第2 类2T1R 的典型机构类型如表4 所示。3.3.1 中3 个支链运动所构成的移动平面要相互平行,第1 个转动副的轴共线,且不垂直于移动平面,第2 个转动副轴线不平行。

表4 具有GF(Rɑ 0 0;Ta Tb 0)型末端特征的典型对称并联机构Tab.4 Typical symmetrical parallel structures of the mechanism with the terminal characteristics as GF(Rɑ 0 0;Ta Tb 0)
3.3 三维移动(3T)并联机器人型综合
3T 并联机器人的末端特征为GF(TaTbTc;0 0 0),由式(2)可得N = 3,n = 3,p = 0,qi= 1(i = 1,2,3),即该并联机构由3 条主动支链构成,不含被动支链。每条主动支链具有一个驱动。
具有第1 类3T 的典型机构类型如表5 所示。3.4.1 对3 条支链没有要求,3.4.2 中3 条支链的转动轴线不能平行,3.4.3 中2 条支链的第1 个转动副轴线平行,其他转动副都不平行。

表5 具有GF(Ta Tb Tc;0 0 0)型末端特征的典型机构类型Tab.5 Typical symmetrical parallel structures of the mechanism with the terminal characteristics as GF(Ta Tb Tc;0 0 0)
4 四自由度混联机器人型综合
构造完混联机器人的并联模块后,接下来按照表1 确定并联机构和串联机构的分配方式,可以组合出表6 所示的几种分配方式(表6 中T 表示串联模块的移动,R 表示串联模块的旋转)。然后,可以对上述组合方式,分别选择合适的并联机构模块和串联机构,就可以构造出所需自由度的混联机器人,比较各种方案,从而选出适合的机构。
表6 中,串联模块T 可以用P ,Pa表示,R 可以用一个转动副R 表示,R + T 可以用R + P,R + Pa,C 表示。
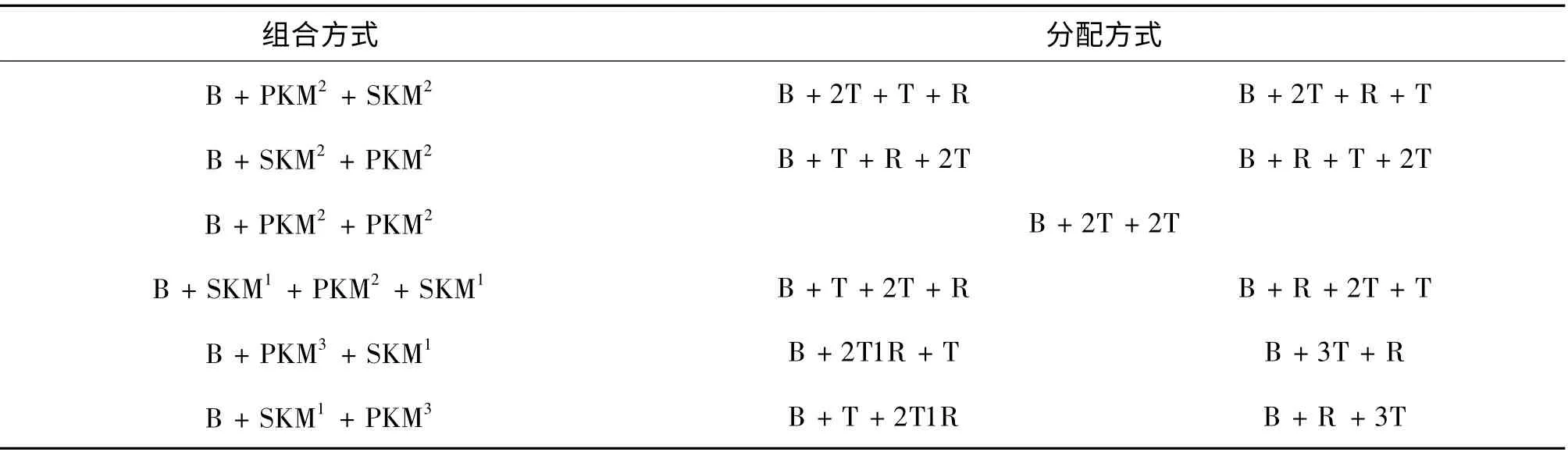
表6 混联机器人串并联机构具体分配方式Tab.6 Specific allocation method of the series-parallel mechanism for the hybrid palletizing robots
下面针对典型的机构进行构型。选择混联机构组合方式,为不失一般性,本例选取B + PKM3+SKM1组合形式,然后分别选取并联模块和串联模块形式,最终得到所需混联机器人。其中并联模块3-(RRR)plPR 提供三维移动自由度,串联模块R 提供一个转动自由度,构成B +3T +R 组合模式,则此混联机器人具体形式为B +3-(RRR)plPR +R,如图1 所示。
首先利用自由度计算通用公式来验证此机构的自由度。计算空间机构自由度的G-K 公式为[14]

式中,M 为机构的自由度;n 为包括机架的构件数目;g 为运动副的数目;fi为第i 个运动副的自由度。此机构的构件数目n = 3 ×4 +2 +1 = 15;g = 3 ×5 +1 = 16;fi= 3 ×5 +1 = 16。按公式(3)计算此机构的自由度为

然后用螺旋理论来分析此机构自由度的性质。这个机构的并联模块是由3 个相同的(RRR)plPR 的分支同时连接上下平台构成。每条支链包括4 个单自由度的转动副和一个自由度的移动副,并且前3个转动副相互平行,然后在动平台上串联一个R 副。

图1 3-(RRR)plPR + R 混联机器人Fig.1 3-(RRR)plPR + R hybrid robot
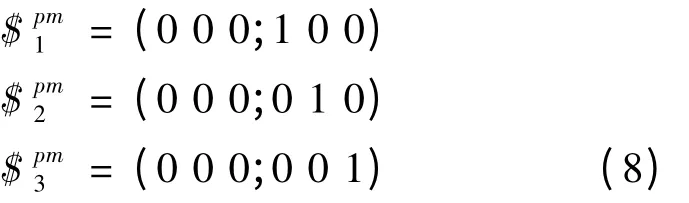
为分析该机构的自由度,选取其中任意一分支,其分支坐标系如图2 所示,分支中5 个运动副可以表示为5 个螺旋:

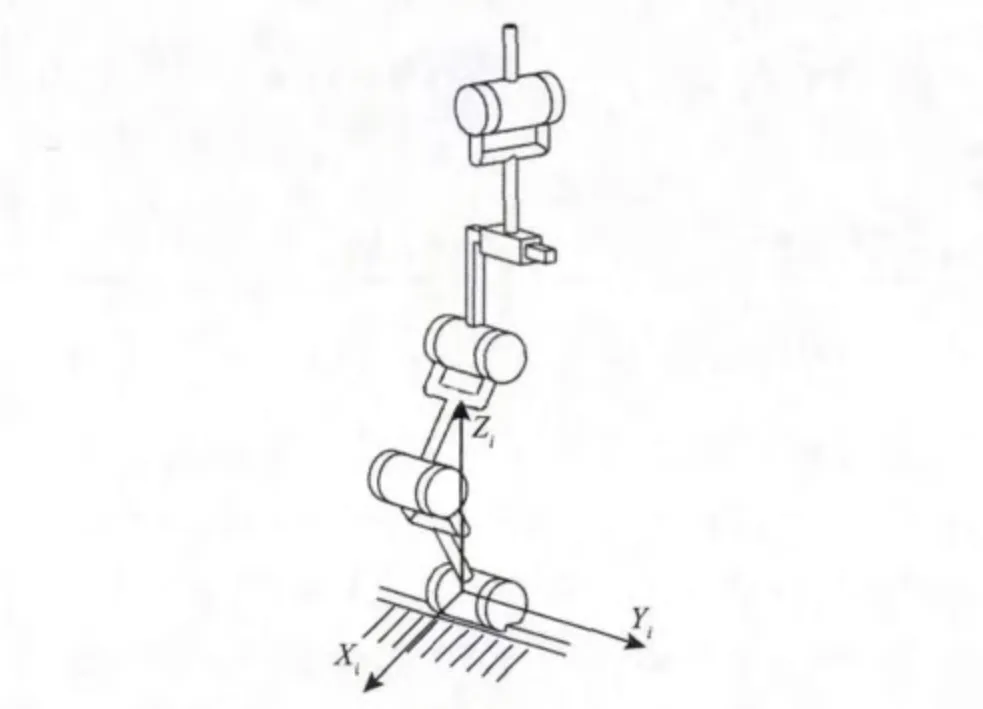
图2 3-(RRR)plPR + R 机构1 个分支Fig.2 One of the 3-(RRR)plPR + R mechanism branches
从整个机构看,3 条完全相同的分支会产生3 个约束力偶作用到动平台上。此时,设立一个统一的坐标系于静平台正三角形中点,这样这个动平台含3 个螺旋的约束螺旋系可以表示为

由此可知,这个机构并联模块具有空间三维的移动自由度,再加上动平台串联的一个转动自由度,所以这个机构共具有4 个自由度,分别为3 个移动自由度和一个绕垂直动平台轴旋转的转动自由度。此机构适用于对移动要求不大,而需要很大的转动来调整产品位姿的工作中,该机构可以提供一个很大的转动工作空间。这个机构还可以运用于对精度要求大、高速重载的场合。
5 结 语
依据混联机构的自由度分配原理,确定四自由度混联机构的自由度分配方式。运用GF理论构型出具有对称结构的典型并联机构模块,然后分别选择合适的并联机构模块和串联机构,以满足所需方位特性,从而就能得到所需方位特性的混联机器人。运用自由度公式对其进行验证,然后提供螺旋理论对其进行分析自由度性质,并以三移一转混联机器人为例阐述了型综合过程。GF理论是一种简单方便的构型方法,可以更直观地表示机构末端的运动特征,更便于对机构进行构型与分析。
此为四自由度混联机器人机构构型综合提供了理论基础,该方法简单有效,对混联机器人构型具有一定指导作用;同时还可用于其他自由度的混联机构构型。
[1]史巧硕.并联机器人机构构型方法研究[D].天津:河北工业大学,2008.
[2]Kong X,Clement M Gosselin,P -L Richard.Type synthesis of parallel mechanisms with multiple operation modes[J].Journal of Mechanical Design,2007,129(6):1037-1046.
[3]Hunt K H.Kinematic Geometry of Mechanisms[M].New York:Clarendon Press Oxford University,1990.
[4]Lee C C,Hervé J M. Type synthesis of primitive Schoenflies-motion generators[J]. Mechanism and Machine Theory,2009,44(10):1980-1997.
[5]Earl C F,Rooney J.Some kinematic structures for robot manipulator designs[J].Journal of Mechanical Design,1983,105(1):15-22.
[6]Gogu G.Parallel mechanisms with decoupled rotation of the moving platform in planar motion[J].Proceedings of the Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science,2010,224:709-720.
[7]杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社,2004.
[8]YANG T L,LIU A X,JIN Q,et al.Position and orientation characteristic equation for topological design of robot mechanisms[J].Journal of Mechanical Design,2009,131(2):21001-21001.1.
[9]王燕伟.一种五自由度混联机器人的运动学分析与仿真[D].哈尔滨:哈尔滨工业大学,2013.
[10]高峰,杨加伦,葛巧德.并联机器人型综合的GF集理论[M].北京:科学出版社,2011.
[11]杨加伦.并联机器人构型的“GF集”理论[D].上海:上海交通大学,2010.
[12]史巧硕,高峰,余发国.一种并联机构末端特征分析方法[J].机械设计与研究,2008,24(5):22-24.
SHI Qiaoshuo,GAO Feng,YU Faguo. An analysis method for kinematic characteristics of parallel mechanisms[J]. Machine Design and Research,2008,24(5):22-24.(in Chinese)
[13]沈惠平,赵海彬,邓嘉鸣,等. 基于自由度分配和方位特征集的混联机器人机型设计方法及应用[J]. 机械工程学报,2012,47(23):56-64.
SHEN Huiping,ZHAO Haibinbin,DENG Jiaming,et al. Type design method and the application for hybrid robot based on freedom distribution and position and orientation characteristic set[J].Journal of Mechanical Engineering,2012,47(23):56-64.(in Chinese)
[14]黄真,刘婧芳,李艳文.论机构的自由度:寻找了150 年的自由度通用公式[M].北京:科学出版社,2011.