模糊PID-PI在硫熏强度变比值控制系统中的应用
2015-01-13司亚楠毛汉领黄福川卢朝霞
司亚楠 毛汉领 黄福川 卢朝霞
(广西大学 a.机械工程学院;b.化学化工学院,南宁 530004)
目前,在亚硫酸法制糖澄清工艺中,参与硫熏中和的SO2是通过燃烧硫磺获得的,因此存在气体外泄、管道腐蚀、操作复杂及硫熏强度难以控制等问题。为改善硫熏强度的控制效果,目前的研究重点集中在燃硫炉改进和SO2浓度自动控制两方面[1]。有研究表明,压缩罐装的液态SO2在理论上完全可以代替传统的燃硫法获得硫气体并应用于硫熏中和,当适当控制液态SO2的汽化速率和汽化后SO2的浓度时,完全能够保证蔗汁的硫熏强度和糖浆的pH值满足工艺指标要求[2]。同时,硫熏强度在线测量装置已经成功运用到糖厂硫熏强度实际检测中,为硫熏强度的自动控制奠定了基础[3]。
根据新工艺的控制要求,液态SO2需要经过汽化和与空气混合配比后通入硫熏中和器,其中SO2的浓度控制是关键,硫熏强度是最终控制目标。设计分别以SO2和空气为主副物料的硫熏强度变比值控制系统,可实现空气和SO2的比值随着硫熏强度的变化要求而变化,在一定程度上可以保证硫熏强度的稳定[4]。但是,考虑到制糖澄清工段的复杂工况和变比值控制系统的非线性及大滞后等特点,需要对系统的主副控制器的类型选择进行综合考虑,为此设计模糊PID-PI控制器用于系统主回路。仿真分析与比较的结果表明,基于模糊PID-PI控制的硫熏强度变比值系统可以获得较好的硫熏强度控制效果。
1.1 控制系统的实现方案
空气-SO2流量变比值控制系统原理框图如图1所示,该控制系统实质上是串级比值控制,主要由变频器、罗茨风机、电动调节阀、流量计、硫熏强度测量装置及控制器等组成。该控制系统由主副两个回路构成,对于系统受到的蔗汁流量波动及SO2吸收不完全等干扰因素,主控制器起细调作用,副控制器采用PID控制器起粗调作用[2]。在硫熏中和过程中,利用硫熏强度在线测量装置不断地将蔗汁中的硫熏强度检测值反馈到主控制器的输入端并与硫熏强度设定值进行比较,主控制器的输出作为副控制器的设定值。空气与SO2的流量经测量变送后送入除法器,将计算得到的实际比值作为副控制器的测量值。副控制器的输出量控制罗茨风机的转速(即空气流量),通过调节空气流量来调整参与硫熏中和的SO2浓度进而使硫熏强度稳定在设定值。
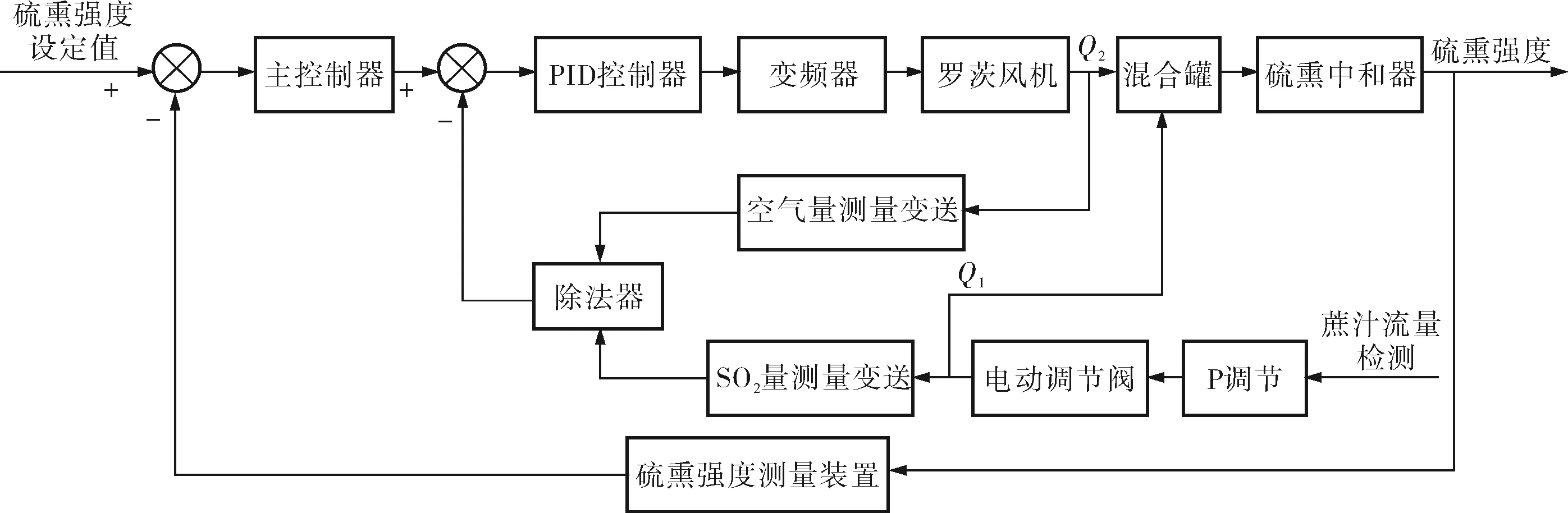
图1 空气-SO2流量变比值控制系统原理框图
1.2 控制系统的数学模型
控制系统的数学模型是对系统性能进行仿真分析的前提和基础。整个变比值控制系统的数学模型主要由变频器的输出频率与罗茨风机输出风量、蔗汁流量检测与SO2通入量、和空气混合配比后的SO2加入量与硫熏强度3个环节构成。
变频器的输出频率与罗茨风机输出风量的关系。系统采用罗茨风机提供空气,其输出风量与转速成正比,通过变频调速改变输出风量来调整参与硫熏中和的SO2浓度,进而调节硫熏强度[5]。该环节可近似认为是比例环节,即:

式中D——外圆直径;
f(s)——变频器频率;
L——叶轮长度;
p——旋转磁场极对数;
Q(s)——罗茨风机的输出风量;
s——转差率;
λ——叶轮面积利用系数。
蔗汁流量检测与SO2通入量的关系。SO2的通入量与蔗汁流量和硫熏强度设定值有关,通过检测蔗汁的流量来控制电动调节阀的开度进而调节SO2的通入量与蔗汁流量成比例关系。
和空气混合配比后的SO2加入量与硫熏强度的关系。硫熏中和过程中,参加硫熏中和反应的SO2绝大部分被吸收,但仍有部分残留。假定残留SO2量与硫熏强度成比例关系,根据参加硫熏中和反应的SO2物料守恒建立数学模型[6,7],即:

写成增量形式为:

经拉普拉斯变换,得传递函数为:

式中c——硫熏强度;
k——残余SO2比例常数;
Ku——电动调节阀开度;
Qi——SO2通入量;
Qo——SO2残余量;
u——电动调节阀开度;
V——单位时间内的蔗汁体积。
可见,硫熏中和过程为一阶惯性环节。
2 模糊PID-PI控制器
2.1 模糊PID-PI控制原理
对于模糊控制而言,增加语言变量所取语言值的个数是提高模糊控制系统的精度和改善跟踪性能的必然选择:语言值分级越细,控制性能越好。但同时带来的缺点是模糊控制规则数增加,控制规则表更难把握,计算量增大,调试更困难,难以满足实时控制的要求[8]。模糊PID控制结合了模糊控制和PID控制的优点,但在变量分级不够多的情况下,在平衡点附近仍常出现小幅振荡的现象。
为解决上述问题,在误差基本论域内将模糊PID控制和PI控制结合进行分段控制。模糊PID-PI控制器主要由模糊PID控制器、PI控制器和模态选择器3部分构成,其原理框图如图2所示。根据偏差e的大小,系统通过模态选择进行分段实时控制:当偏差大于设定阈值时,系统采用模糊PID控制;当偏差小于阈值时,系统采用PI控制。
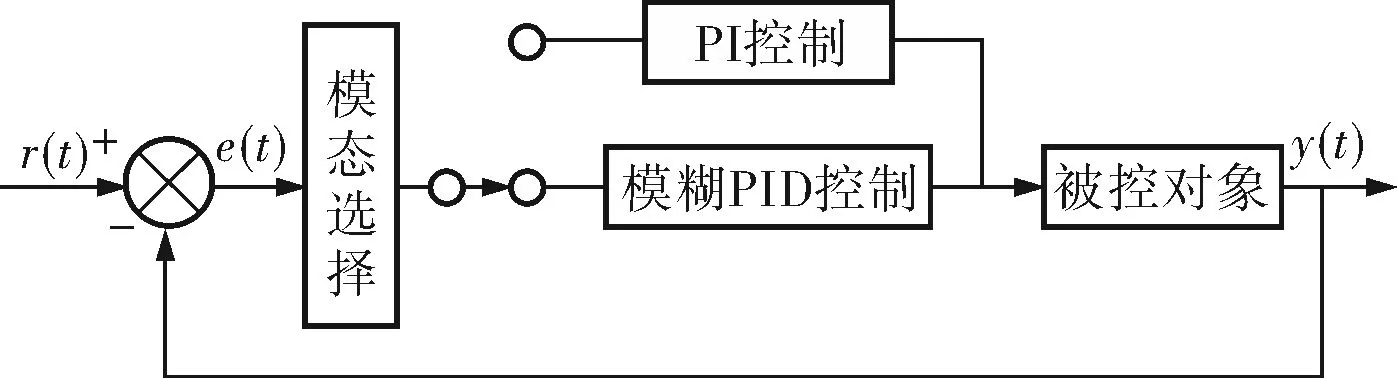
图2 模糊PID-PI控制器原理框图
该方法中,模糊控制论域只是整个论域的一部分,等效于模糊控制论域被压缩,语言变量的分级数增加,提高了系统的精度和灵敏度。同时,PI控制在平衡点附近的小范围内调节效果比较理想,其积分作用可最终消除静态误差。
2.2 模糊PID控制
模糊PID-PI控制器的核心是模糊PID控制器。模糊PID控制器由模糊控制器和PID控制器两部分构成,其结构框图如图3所示[9]。

图3 模糊PID控制器结构框图
模糊PID控制环节的具体设计描述如下:
a. 确定模糊控制器的维数。采用二维输入、三维输出的模糊控制器,分别以硫熏强度偏差e和偏差变化率ec为输入,PID参数的修正量Δkp、Δki和Δkd为输出。
b. 选取模糊语言变量,确定变量论域。设输入参数的语言变量为E和EC,输出参数的语言变量为Δkp、Δki和Δkd。输入和输出变量的模糊论域均定义为[-6,+6],模糊论域按7个档级进行划分,其对应的模糊子集为[NB,NM,NS,ZO,PS,PM,PB]。
c. 确定变量的基本论域、量化因子和比例因子。偏差e和偏差变化率ec的基本论域均为[-0.5,+0.5],量化因子ke=kec=6/0.5=12。Δkp的基本论域为[-0.06,+0.06],比例因子kup=0.06/6=0.01;Δki的基本论域为[-0.035,+0.035],比例因子kui=0.035/6=0.0054;Δkd的基本论域为[-0.06,+0.06],比例因子kud=0.06/6=0.01。
d. 确定各语言变量论域上的隶属函数。输入变量E、EC以及输出变量Δkp、Δki和Δkd均选用工程上常用的三角形隶属函数(trimf)。
e. 制定模糊控制规则。模糊控制规则是根据手动调节控制系统的经验总结出的变化量与控制量之间的因果对应规律。模糊控制规则的制定以偏差和偏差变化趋势来消除偏差为基础,通过模糊推理和试验加以修正。根据PID参数的基本整定原则和蔗汁澄清工段硫熏中和过程的实际操作经验,得到的Δkp、Δki和Δkd的模糊控制规则见表1[10]。
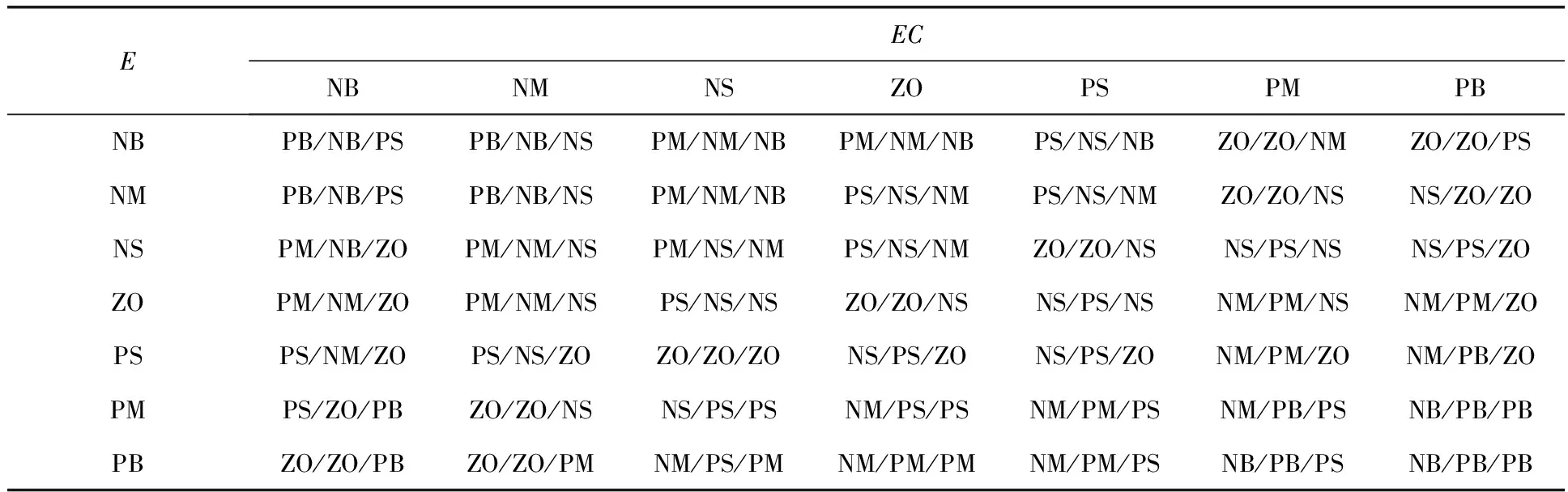
表1 Δkp、Δki、Δkd的模糊控制规则
f. 解模糊。把模糊量转换为精确量的过程称为解模糊。解模糊的方法有最大隶属度法、重心法、中位数法及系数加权平均法等。在此笔者采用重心法,取模糊隶属度曲线与横坐标轴围成的面积的重心为代表点。
根据模糊PID控制环节的设计可计算出在不同e和ec下的PID参数调整量,则模糊PID控制器的参数整定式为:
kp=kp0+Δkp
ki=ki0+Δki
kd=kd0+Δkd
2.3 PI控制
在模糊PID-PI控制器中,PI控制具有分割偏差基本论域、提高系统精度和在平衡点附近抑制小幅振荡的作用。取阈值EP=1,经参数整定,PI控制器的参数kp=4、ki=0.0078。
3 仿真分析
3.1 模糊控制器的编辑
在Matlab命令窗口输入fuzzy,打开FIS编辑器建立一个Mamdani型模糊控制器。根据前述分析分别输入|e|、|ec|和Δkp、Δki、Δkd的隶属函数和量化区间。最后打开模糊规则编辑窗口,根据表1建立模糊控制规则,具体如下:
If(eis NB) and (ecis NB) then (Δkiis PB) and (Δkiis NB) and (Δkdis NS)
...
取与运算为min、或运算为max、推理方法为min、合成方法为max、解模糊方法为centroid。模糊推理器编辑完成后,可以观察模糊控制规则和模糊推理输出曲面,将其保存为fis文件,以便用Simulink进行系统仿真时调用。
3.2 仿真模型
基于Matlab/Simulink建立的主控制器分别为PID控制器、模糊PID控制器和模糊PID-PI控制器,副控制器均为常规PID控制器的硫熏强度变比值控制系统仿真模型。主控制器为模糊PID-PI控制器的系统仿真模型如图4所示,其中PID控制器、Fuzzy Logic Controller和模糊PID控制器均为根据相关控制原理建立和封装的自定义模块[11],Switch为模态选择开关,EP表示从模糊PID控制切换到PI控制的阈值。阈值的选取决定了模糊控制器的论域,通过对主控制器分别采用传统PID控制和模糊PID控制的结果进行分析:取阈值EP=1,当|e|≥1时采取模糊PID控制,当|e|<1时切换到PI控制。
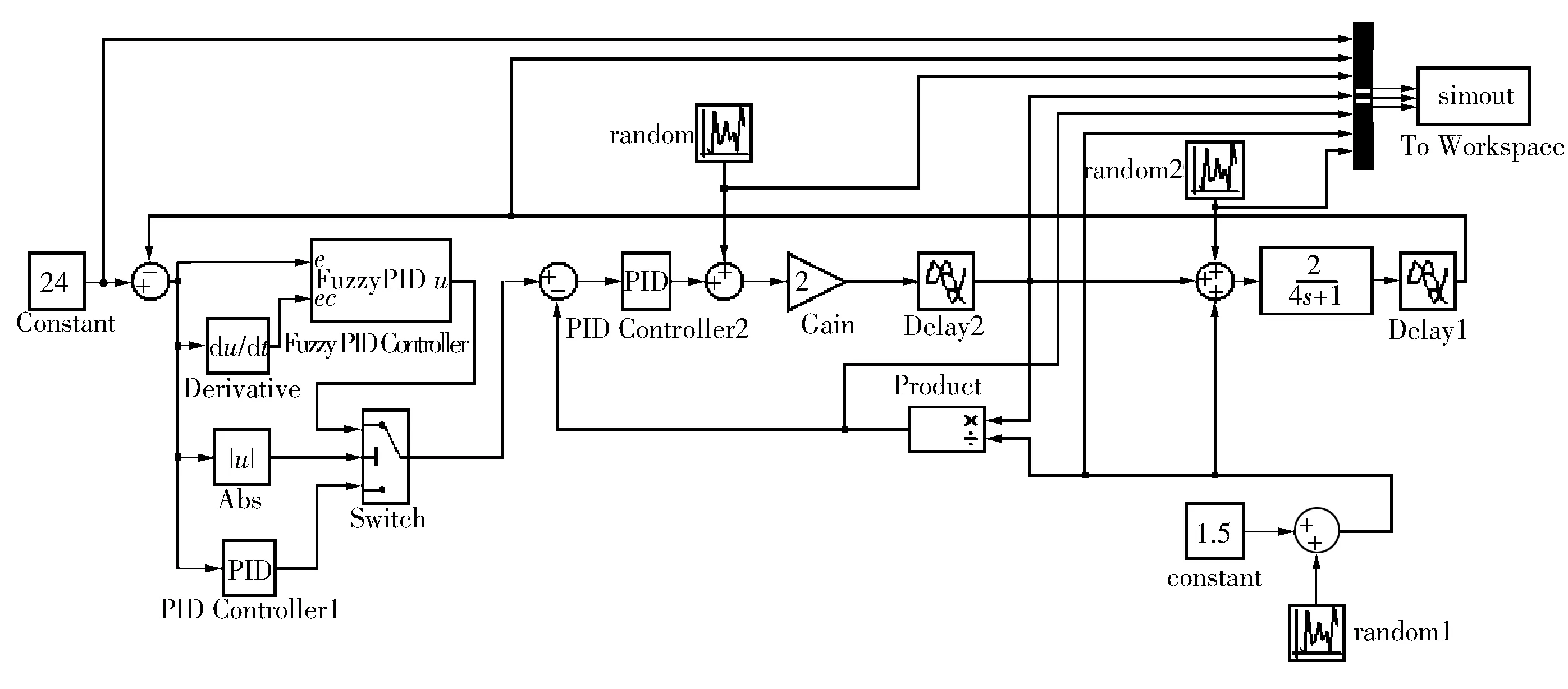
图4 模糊PID-PI控制器系统仿真模型
3.3 PID参数整定
PID控制器的参数整定方法很多,考虑采用工程上常用的临界比例度法[12]。首先整定从动量闭环控制器的PID参数,结果其振荡周期Tcr=42s、kp2=0.011、ki2=0.0025、kd2=0;其次整定主动量闭环控制器的PID参数,即模糊PID控制器的初始参数,结果其Tcr=65s、kp0=kp1=2.139、ki0=ki1=0.025、kd0=kd1=22.9。
3.4 仿真结果
设主动量SO2为1.5且受幅度为0.1的随机干扰,从动量空气受幅度为0.08的随机干扰,从动量与主动量的比值为5。主被控量硫熏强度的设定值为24,受幅度为0.07的随机干扰。设定PID参数、量化因子及比例因子等参数,其中ke=12、kec=12、kup=0.0001、kui=0.0054、kud=0.0001。
运行系统仿真模型,主控制器分别为PID控制器、模糊PID控制器和模糊PID-PI控制器时的仿真结果如图5~7所示。

图5 PID控制器的仿真结果
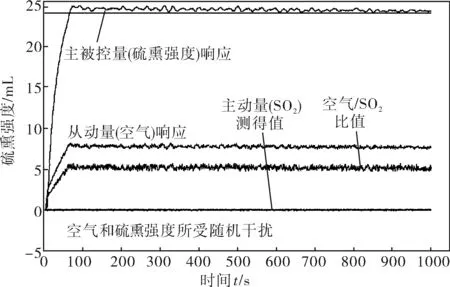
图6 模糊PID控制器的仿真结果
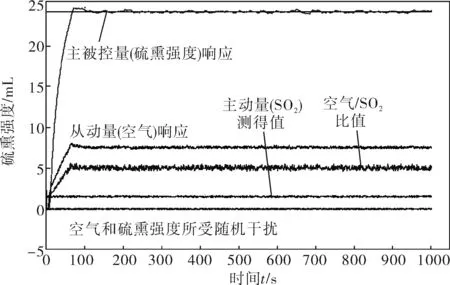
图7 模糊PID-PI控制器的仿真结果
由图5~7可以看出,主控制器分别采用PID控制、模糊PID控制和模糊PID-PI分段控制时,PID控制超调量大、响应速度慢;模糊PID控制存在在设定值上方频繁小幅振荡的问题;模糊PID-PI分段控制超调量小、响应速度快且稳态性能好,在三者中控制效果最佳。具体的响应性能指标见表2。
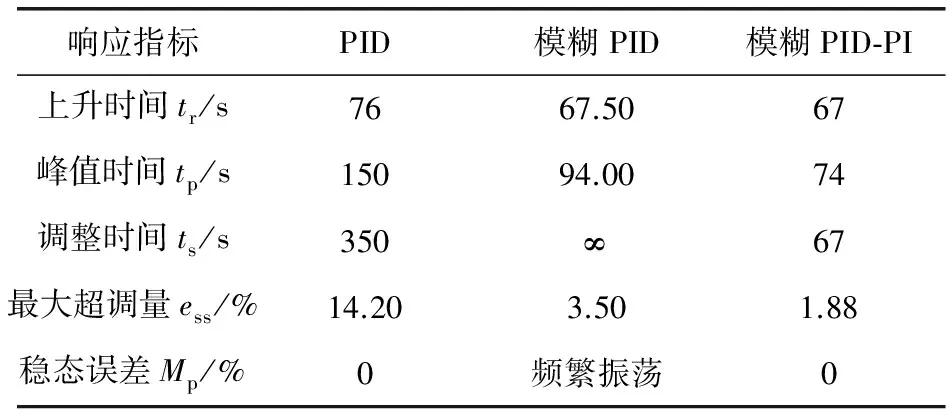
表2 主被控量响应性能指标
4 结束语
通过对罐装SO2代替传统燃硫法获得的硫气用于制糖澄清工段的新工艺进行分析,建立了硫熏强度变比值控制系统和系统的数学模型,提出并设计了模糊PID-PI控制器。对主控制器分别采用PID控制、模糊PID控制和模糊PID-PI控制的硫熏强度变比值控制系统进行了仿真,结果表明:与PID控制和模糊PID控制相比,模糊PID-PI控制的最大超调量小于2%,无稳态误差,上升时间、峰值时间和调整时间都比较短,具有超调量小、响应速度快及稳态性能好等优点,能够很好地解决罐装SO2用于硫熏中和时硫熏强度精确控制的问题。同时,仿真结果也验证了模糊PID-PI控制的可行性,为实际应用提供了理论基础。
[1] 叶丽娜,林兴盛,甘迪宁,等.全自动喷雾燃硫系统技术原理及应用[J].甘蔗糖业,2012,(5):44~48.
[2] 邱汉华,李琳.液态二氧化硫在糖汁澄清过程中应用的初步研究[J].甘蔗糖业,1995,(6):35~39.
[3] 黄欢.糖厂硫熏在线测控系统的设计与实现[J].广西蔗糖,2009,(4):38~40,48.
[4] 李雪梅,王国荣,任礼道.H2S/SO2比值控制系统在硫磺回收装置的应用[J].化工自动化及仪表,2013,40(2):280~282.
[5] 熊滨生,陈江义,熊安然,等.三叶罗茨风机的流量特性研究[J].流体机械,2005,33(12):27~29.
[6] 郭海蓉,张思原,陈赶林,等.蔗汁硫熏中和过程SO2的化学吸收[J].甘蔗糖业,2005,(5):24~27.
[7] 刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2011.
[8] 杨凌霄,陶玉昆,钟颖.超磁致伸缩执行器的P-模糊PID控制[J].计算机仿真,2011,28(1):214~217.
[9] 席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[10] 霍振宇.基于模糊PID的加热炉炉温控制系统[J].化工自动化及仪表,2011,38(9):1136~1137,1157.
[11] 郭阳宽,王正林.过程控制工程及仿真:基于MATLAB/Simulink[M].北京:电子工业出版社,2009.
[12] 孙跃光,林怀蔚,周华茂,等.基于临界比例度法整定PID控制器参数的仿真研究[J].现代电子技术,2012,35(8):192~194.