长三角地区花椰菜生产机械化模式探讨
2015-01-04
(农业部南京农业机械化研究所,江苏南京 210014)
长三角地区花椰菜生产机械化模式探讨
高庆生 胡 桧 陈永生 管春松 杨雅婷
(农业部南京农业机械化研究所,江苏南京 210014)
生产机械化技术滞后已成为限制花椰菜产业发展的主要因素之一,而品种选择、耕种收主要作业环节农机农艺配套难是影响花椰菜生产机械化发展的难点。本文以长三角地区典型农业生产生态园为试验基地,开展系统设计并提出宽垄双行、宽垄三行两种花椰菜机械化作业模式。
近年来,中国花椰菜产业发展迅速,2011年花椰菜总产量900万t,占全球花椰菜总产量的43%,排名第一(李文萍 等,2014)。花椰菜是劳动密集型作物,其田间生产环节主要包括育苗、耕整、移栽、田间管理、收获(剪切、捡拾、收集)等,其中整地、移栽、收获是劳动强度大、用工量较多的环节,尤其是收获环节,目前主要依靠人工完成(陈爱国 等,2008)。长三角地区作为中国花椰菜种植的主要区域,种植面积逐年增加,其中浙江台州、温州,江苏南京,上海崇明等地的花椰菜种植规模位居全国前列,基本实现了花椰菜的周年供应,取得了良好的经济效益和社会效益。然而,中国设施农业机械化种植技术的落后严重制约着花椰菜产业的进一步发展。在此前提下,进行花椰菜生产机械化模式研究具有重要的现实意义。
1 品种选择
长三角地区花椰菜生产一般分为露地栽培和设施栽培。露地栽培一般在春季2~4月播种,设施栽培可进行春秋双季栽培,秋季栽培7月中旬至8月上旬播种育苗,选择遇低温不易变色、耐低温性强的品种,如贞心、雪冠、雪辉、兴申等;春季栽培1月下旬至2月中旬播种育苗,选择前期营养生长势强的品种,如春美、雪辉、瑞雪等。
2 种植模式对花椰菜机械化作业的影响
2.1 花椰菜种植模式
中国现行的花椰菜种植模式多样,垄作、平作皆有,以垄作为主,种植规格有小垄单行、宽窄行、宽垄双行、宽垄三行、宽垄四行。小垄单行种植垄距60 cm;宽窄行种植的宽行垄顶宽60~70 cm,窄行垄顶宽40~50 cm;宽垄双行的种植垄距一般为120~140 cm,行距55 cm;宽垄三行的种植垄距一般为135 cm,行距35~50 cm;宽垄四行的种植垄距一般为180~200 cm,行距35~45 cm。长三角地区花椰菜种植模式主要以露地宽垄双行、宽垄四行以及设施宽垄双行为主。
2.2 花椰菜机械作业农艺要求
花椰菜是低温长日照植物,喜光、喜湿润环境,水分需求量较多,尤其是花芽分化后的花球形成期需要水分更多,如果水分亏缺会抑制花球形成,降低产量和品质;对土壤养分要求较严格,以土层深厚、肥沃、排水良好的壤土或粘壤土较适宜。
为实现农机农艺相融合的目标,在花椰菜机械化作业过程中,一方面要根据花椰菜的种植农艺规范选择适宜的作业机械;另一方面要根据机械化作业要求进行花椰菜选种和育苗等。具体要求可总结为耕整地时要起高垄,选择移栽机行距可调范围要大,种苗培育要适宜机械移栽等。
2.3 作业装备
目前,花椰菜生产配套作业机具有自走式和牵引式两种,但自走式作业机具价格较高,所以在实际生产中以牵引式为主。中国拖拉机生产厂家较多,型号多样,生产的拖拉机动力配置、技术参数虽有标准,但具体结构、尺寸等细节却有很大差别。如马力相同的拖拉机,在轮距、轮宽上却不相同(胡良龙 等,2014)。不同功率的拖拉机对应的轮距和轮宽不同(表1),国内机具一般可实现轮距的有级调节,但操作较为麻烦,在实际作业时很少变动,一般保持出厂设置。此外,拖拉机前轮轮距较小,作业时前轮印会被后轮覆盖,所以在选择拖拉机时主要考虑后轮参数。
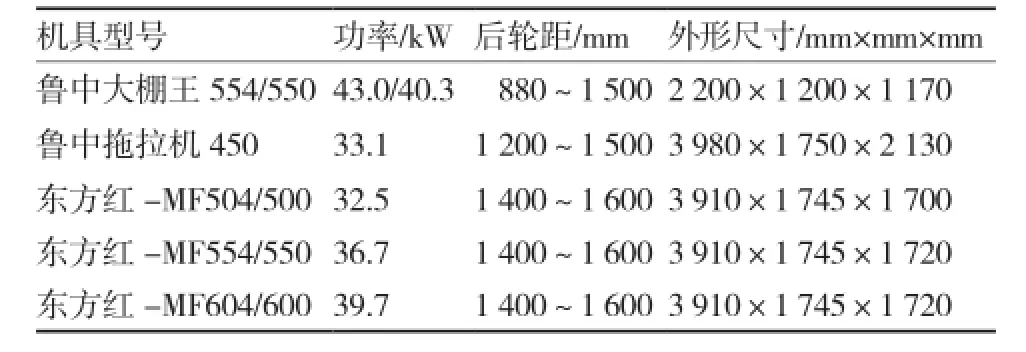
表1 长三角地区常见拖拉机参数
3 轮距、垄距对不同作业环节的影响
花椰菜大棚种植,不同作业环节对动力机具的要求不同:耕整地时拖拉机在前、起垄在后,所以拖拉机的轮距略小于垄宽即可。移栽、收获等环节是在垄已形成后作业,移栽机、叶菜收获机等机具必须在垄沟中行走,所以机具工作幅宽要略大于垄宽。综上可知,动力上能满足作业要求的机具并不一定符合垄距要求,因此必须对机具动力轮距及种植垄距进行合理配套,在保证起垄质量的同时,还要保证垄形结构完整,实现农机农艺的完美融合。
4 大棚结构对机具选择的影响
以钢架结构大棚为例,大棚建造形式主要有拱圆型和屋脊型两种,单栋的跨度为6~15 m,每栋占地面积约为667 m2(1亩),连栋后占地面积为1 334~3 335 m2(2~5亩)或6 667 m2(10亩)以上。根据中华人民共和国机械行业标准中关于连栋大棚的建造标准,影响机具作业效率的大棚建造参数主要包括跨度、下弦高度(温室屋面主构架下沿离地面的高度)、大门的高度和宽度。建造标准规定:当跨度为6 m时,下弦高度应不小于1.8 m;当跨度为7~8 m时,下弦高度应不小于2.4 m;当跨度为9~10 m时,下弦高度应不小于3.0 m;当跨度为12~15 m时,下弦高度应不小于3.6 m。专门用于操作人员进出的门,高度不低于1.8 m,宽度不小于1.2 m;机具进出门的高度一般不低于2.2 m,宽度应比所通过的最大设备的宽度大0.4 m以上。在选择机具时主要考虑影响地边作业的大棚下弦高度和方便进出的大门高度。
5 适宜花椰菜机械化生产的作业模式
为解决上述问题,从起垄、移栽、收获等主要作业环节入手,农机农艺相结合,以经济适用为原则,以高产高效为目标,综合作业区域自然条件和拖拉机保有量,开展系统设计、研究,并提出宽垄双行和宽垄三行两种花椰菜机械化作业模式。其中宽垄双行作业模式在露地和大棚内皆适用,宽垄三行作业模式主要适用于露地种植。
5.1 宽垄双行作业模式
该模式垄面宽度70~75 cm,垄底宽度100~110 cm,垄距为100~110 cm,垄高15 cm(图1);具有经济性较高、配套简单、适应性广、前期投入成本少等优点。配套动力可选用鲁中大棚王550、鲁中大棚王554、东方红-MF554、东方红-MF600等大中型拖拉机。整地机可选择华龙1ZKNP-125偏置精整地机,工作幅宽为125 cm;移栽机工作幅宽应在整地机尺寸的基础上有所加大,可选用华龙2ZBZ-2A自走式双垄移栽机;收获作业时设施内可选用收获推车,露地种植时还可选用收获拖车。
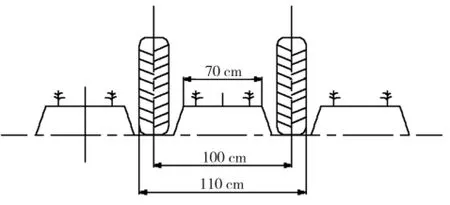
图1 宽垄双行作业模式
5.2 宽垄三行作业模式
该模式垄面宽度110~120 cm,垄底宽度120~130 cm,垄距为135~145 cm,垄高10 cm(图2);作业效率高,容易被规模化种植大户接受,但前期投入成本高。配套动力可选用鲁中大棚王554、东方红-MF604等大型拖拉机。整地机可选择华龙1GZK-140深松整地联合作业机,工作幅宽为110~130 cm;移栽机工作幅宽应在整地机尺寸的基础上有所加大,可配套使用华龙2ZBX-3A三行移栽机;收获作业时可选用收获推车。
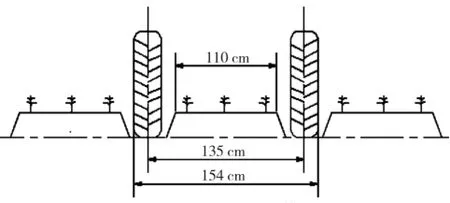
图2 宽垄三行作业模式
5.3 花椰菜机械化生产作业效率及效益分析
农业生产需要高强度的劳动支撑,农业机械化的发展可降低生产者的劳动强度,减少人工费用,达到降低生产成本、提高作业效率的目的。以露地宽垄双行种植模式为例,分析花椰菜生产机械化程度较高的耕整地、起垄和移栽环节的作业效率及效益(表2)。
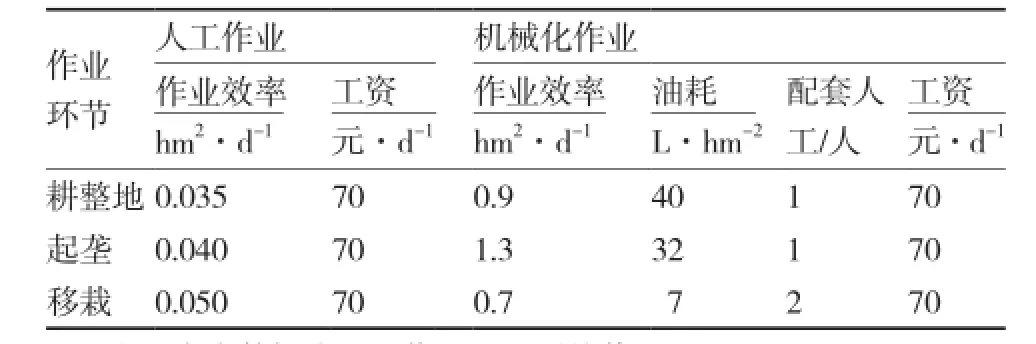
表2 花椰菜机械化作业效率及效益分析(露地宽垄双行种植模式)
机械化作业成本由可变成本和固定成本组成,其中可变成本主要包括人工工资和油费;固定成本包括保养费、维修费、折旧费、资金利息损失等。一般情况下,维修费和保养费等占总固定成本比例较小,可忽略不计,所以机器固定成本主要由年均折旧费和资金利息损失组成。其中年均折旧费=机具价格/机具寿命,资金利息损失=机器价格×机具寿命年限的银行利率。机具年固定成本确定后,将机具年固定成本平均分摊为机具每公顷作业的固定成本,每公顷的固定成本与可变成本之和即是机具单位面积的作业成本。
根据表2中调研数据计算耕整地、起垄和移栽3个环节每公顷的作业成本,其中人工耕整地为2 000元,起垄为1 750元,移栽为1 400元,3个环节人工作业成本合计5 150元;机械化耕整地为343元,起垄为200元,移栽为260元,3个环节机械化作业可变成本合计803元。
根据机具价格和银行利率可计算出机械化作业固定成本为1 600元,配套动力每公顷的作业成本为400元,即每公顷的机械化作业总成本为2 803元,与人工作业相比可节约成本2 347元。
再根据以上步骤对花椰菜另外两种作业模式进行经济效益分析,结果表明花椰菜机械化种植经济效益与人工种植经济效益相比具有明显优势。
6 建议
中国花椰菜生产机械研发滞后,机具系列化、标准化和专业化程度低。花椰菜种植机械仍处在起步阶段,因此各地在选择适宜的作业模式时,需先对当前的蔬菜种植规范、机具配置、经济条件等因素进行调研分析后再做决策。
花椰菜机械化栽培是一项系统工程,建立适宜的花椰菜种植机械化技术体系将涉及园艺、农学、植保、机械设计与制造、自动控制等领域,需多学科联合攻关。为形成花椰菜全程机械化种植模式,需将农机与农艺、移栽机械与育苗技术等相结合。
花椰菜机械化种植与传统的人工栽植有所不同,为满足花椰菜种植的农艺要求,在前期的品种选择、育苗方式、整地质量等方面应进行不断调整和尝试,实现农机与农艺相融合。同时,机具设计还应充分考虑调整的方便性,如旋耕起垄机具的垄宽和紧实度调整,移栽机具的行距和株距调整等。
陈爱国,潘秀萍,陈宝宽,丁志宽.2008.秋花椰菜设施配套栽培技术.中国蔬菜,(8):49-50.
李文萍,林俊城,黄科.2014.全球花椰菜生产与贸易现状分析.中国蔬菜,(9):5-10.
胡良龙,田立佳,计福来,王冰.2014.甘薯生产机械化作业模式研究.中国农机化学报,(5):165-168.
高庆生,男,研究实习员,专业方向:农业机械化,E-mail:15855125783@163.com
2015-04-30;接受日期:2015-06-05
江苏省科技支撑计划项目(BE2014309),农业部公益性行业专项(201403032)
