混合动力汽车高原制动真空度影响因素研究
2015-01-04简英杰徐赟邱笑寅李楠
简英杰 徐赟 邱笑寅 李楠
(上海汽车集团股份有限公司)
混合动力汽车高原制动真空度影响因素研究
简英杰 徐赟 邱笑寅 李楠
(上海汽车集团股份有限公司)
对某插电式混合动力汽车制动真空度的影响因素进行了阐述,结合混合动力汽车动力输出工况进行了负压制动助力的策略调整,根据电子真空泵的工作特性制定了高原工作方案,并针对典型工况进行了整车试验研究。结果表明,针对影响因素进行策略调整后,该混合动力汽车高原真空度水平有效改善并能满足高原制动的性能要求。
1 前言
与传统内燃机车型相比,混合动力汽车及纯电动汽车牺牲了部分真空源,或无法提供来自发动机进气歧管侧的真空度。为了适应高原环境的特殊要求,混合动力汽车需配备电子真空泵、机械真空泵等装置来提供制动真空度。目前,我国研究机构及企业主要是针对真空泵的选型、设计计算、试验方法等方面进行研究,旨在优化制动系统,更好地匹配于各类车辆;而国外研究机构则是偏重真空系统仿真、负压制动助力器改型等,目的是与各大整车厂商进行系统配套,设计更安全、可靠、体积更小的制动真空泵。
本文从负压制动助力及电子真空泵的工作特性出发,通过整车制动性能试验,分析了车辆冷起动、怠速行驶、混动串联动力模式等因素对制动真空度的影响程度。
2 负压制动助力及电子真空泵特性
2.1 负压制动助力
负压制动即利用发动机进气管中负压能量提供制动助力,这部分负压能量主要来源于发动机进气冲程节气门后端产生的真空度。根据发动机工作状态的不同,真空度(进气管侧真空度)的变化范围约为50~90 kPa。当驾驶员实施制动时,助力器将负压能量与制动踏板力结合形成实际需求的制动力,并将此制动力一直放大到接近车轮抱死的程度。根据施加的制动踏板力的不同,放大的控制力约为6 000~10 000 kPa。
2.2 电子真空泵工作特性
EVP(电子真空泵)为制动系统提供真空源。在某些高原环境大气压较低的工作条件下,当节气门开度大、冷起动、频繁实施制动时,发动机进气管真空度不足,需要EVP作为真空源提供制动真空度,并且可以根据车辆运行工况的不同自动进行调整。EVP可根据大气压的变化来调整工作阀值,当真空度低于阀值下止点时EVP开始工作,而达到工作阀值上止点时停止工作进入待命状态,直至由于制动消耗导致真空不足进入下一个工作循环。EVP组成如图1所示,其通过安装支架安装在发动机舱内,进气口与真空管相连,接插件与控制单元相连,工作时作为制动系统真空助力增压器的真空源。
3 真空助力制动系统力的输入与输出
3.1 制动踏板力与助力器关系
根据输出制动力与制动踏板力的特性,可得到二者之间的关系如下:
式中,Fin为驾驶员施加的踏板力;Ra为踏板机构的杠杆比;Φpedal为踏板机构的传动效率;Fout为输出制动力。
式中,Rbooster为助力器助力比;Φbooster为助力器效率;Fz为串联式双制动总泵输出力。
式中,Φmaster为助力器主缸工作效率;Az为串联式主缸作用面积;Pz为制动油压。
式中,Fboost为经真空助力器放大后的力;Abooster为助力器有效作用面积;△P为大气压与真空压力差值。
3.2 踏板刚度和输出制动力与踏板力关系
踏板力与踏板行程关系曲线的斜率定义为踏板刚度,如图2所示。由图2可看出,在驾驶员施加踏板力时,踏板力增加的过程可分为1阶段和2阶段,两个阶段前、后斜率明显不同,前半段踏板刚度较小是由于真空助力或EVP作用的结果,而后半段踏板刚度明显增加。
经助力器放大后的制动力(下称放大助力)的大小可随驾驶员输出踏板力的大小而变化。当助力失效(Booster failed)时,即使踏板力逐渐增大,放大助力的大小也未急剧增加;而采用双助力比机构(Dual Ratio Booster)的助力器时,随着驾驶员制动踏板力的增加,踏板刚度也随之线性增加,在经历了1阶段(图2)单助力比的上升过程后进入双助力比阶段,此时助力器放大后的制动力能较好地满足制动性能的需求。
3.3 制动真空管伯努利方程
根据真空管中空气的运动特性得到:
式中,Pc为气流的压差;ρgy为重力位能;1/2ρυ2为动能项。
制动真空管模型如图3所示。
取图3中助力器端快速接头和进气歧管快速接头的2个横断截面建立真空管路中空气流的能量方程,以分析影响真空度大小的因素,其中忽略不计重力位能和大气压变化导致的气体密度变化以及空气流经管路及阀体的能量损耗,则得:
式中,Pc1为气流流经断面的来流压差;ρ为真空管内空气密度;υ1为流经断助力器端快速接头断面的气体流速;Pc2为气体流经进气歧管快速接头断面的来流压差;υ2为流经进气歧管快速接头断面的气体流速。
气流流经断面的来流压差可视为大气压力与进气压力的差值,即
式中,P0为当地大气压值;PM为进气管压力。
由式(6)和式(7)可得到制动真空度影响因素伯努利方程:
式中,PM1、PM2分别为所在截面进气压力。
由上述方程可知,真空管中真空度的大小与发动机的工作状态、汽油发动机进气控制的方式、节气门开度等因素有关。
4 某混合动力汽车动力输出方案及控制策略简介
混合动力汽车的动力输出方案不同,将导致发动机参与工作的方式不同,若发动机不参与工作或工作后只对电池充电,则无法提供发动机真空源。另外,混合动力汽车的控制策略也能通过调整扭矩控制的方式来影响制动真空度。
4.1 某混合动力汽车动力输出方案
某混合动力汽车的发动机、ISG(汽车起动发电一体机)与TM(驱动电机)之间通过电控离合器实现动力接合与中断。由于低速工况下发动机并不能直接工作或驱动车辆,所以该车提供了多种驱动模式的手动选择方式,如纯电模式、混动模式等。当按下纯电动按钮时,HCU会尽量采用纯电动模式行驶,随电池功率降低或车速达到一定值后,HCU自动切换为混动模式;当按下混动模式按钮时,HCU会根据动力性和经济性需求决定采取纯电动或是混动模式行驶。
4.2 控制策略说明
控制策略主要是通过EMS(发动机管理系统)来更改扭矩输出方案、怠速工况下的扭矩控制、其它功能块的功能更改及参数优化;通过HCU对整车功率需求进行限制,改善起动工况、急加速等动力性能需求,调整其它功能块的功率输出及功能设定。
5 对真空度影响因素的策略调整
5.1 基于EVP特性的门限值调整
EVP在工作时需要设定最低及过载门限值。首先设置满足最低门限要求的值,再确定EVP过载保护状态下的保护值,即EVP在过载前降门限值。若EVP在工作时出现过载,则设定过载工作时间,EVP在此时间段内不再提供额外的真空度压力(抽真空),由发动机进气行程来提供真空度压力,待EVP进入下一个循环状态时降低过载门限。
根据海拔高度等因素的变化,可随机调整EVP门限值,如车辆从海拔较低地区进入海拔较高地区时,可将工作阀值从40 kPa降低到35 kPa甚至更低;从海拔较高地区进入海拔较低地区时调整阀值为40 kPa或更高。
在满足最低门限值要求的情况下,可根据实际车辆运行情况选择在EVP过载前降低工作门限值进行过载保护时间间隔设定。
5.2 发动机起动转速调整
发动机起动工况下由于混合动力汽车串并联输出方案不同,扭矩需求会不同,从而导致节气门开度也不同。由于在串联模式下发动机参与工作,此时可调整发动机起动转速以及怠速下的工作转速来达到调整节气门开度的目的。而并联模式下选择EVP的最低工作门限值及强制真空度启动的方式,可使EVP提前工作,从而保证起动工况下的制动真空度充足,踏板感觉良好。
5.3 发动机起动故障下的策略调整
在高海拔地区,大气压及气温通常较低,当由于常规起动或短暂坡道起停等工况下导致无法顺利起动发动机时,可通过限制转速的输出使得发动机在起动失败的情况下也能提供正常水平的真空度。
5.4 优先扭矩需求控制策略调整
在高海拔地区,由于环境压力的下降会导致原本在平原地区正常的扭矩请求输出过迟而使得真空度不足,与此同时节气门开度最大或开度趋势增加的情况下同样会造成真空度的严重不足。
当以上双重因素导致真空度不足时,扭矩需求策略应首先满足制动性能方面的需求,即最优先的扭矩请求为提前限制扭矩。通过采集驾驶员的扭矩需求,EMS通过调整节气门的开度与点火角的提前与延后来控制扭矩,二者的调整是同时进行或是单独进行取决于EMS采集到的驾驶员油门踏板的型谱图。
5.5 电子节气门控制策略调整
ECU中的定位控制模块控制电机的旋转,节气门体中的位置传感器实时监测阀门位置并将监测到的信号传输给ECU,通过位置定义并配合ECU相关信号的标定控制节气门开度,从而达到真空度全工况下的良好利用,如节气门关闭下的间隙位置设定、弹簧回位系统的节气门体位置设置、车辆运行全工况下的节气门最大开度控制。
5.6 特殊工况下标定调整
特殊工况下如节气门开度大、高寒高海拔情况下的冷起动、上下坡情形下的车辆频繁制动等,此时车辆动力模式切换至发动机工作状态但并不能提供足够的真空度水平,此时可在线修改标定增加EVP强行起动策略,以满足真空度水平的需求。
5.7 发动机起动下油温的选择策略
在发动机冷起动工况下,由于频繁踩制动踏板使EVP过载,因而只有发动机进气行程来提供制动真空度。随着油温的上升,制动真空度值从小变大所耗费时间也随之缩短,油温高时首次实施制动就能提供可靠的真空度助力。但冷起动下由于油温较低,初期真空度的建立需要3 s左右甚至更长时间,初始制动感觉会比发动机油温稍高时偏硬,且真空度压力水平会比油温稍高时低2 kPa左右。
通过试验研究可知,发动机热机状态下的真空度水平要比冷机状态下略高,因而在真空度要求苛刻的情况下,应选择延长热机时间的策略,可在冷起动状态下也能满足基本的制动真空度。
5.8 车辆起动后首次制动踏板力的调整
首次制动通常发生在制动踏板作为发动机工作的促发条件、驾驶员出于安全需求踩下制动踏板、变换挡位等状况下。当发动机刚起动时制动真空度处于建立的时间段,若驾驶员将制动踏板踩得较深,在真空度建立的过程中会消耗一部分真空,在起步后需要频繁制动等特殊情况下会出现制动踏板感觉变差的情况。此时需要调整初始制动踏板力的大小使真空度建立的时间尽量缩短。
6 整车典型工况试验
车辆典型工况下的真空度试验是利用真空度的实时采集和主观评价来综合判断真空度水平,试验用发动机参数、真空泵参数如表1和表2所列。

表1 试验用发动机参数

表2 试验用电子真空泵参数
6.1 试验设备
试验用仪器和设备如表3所列。
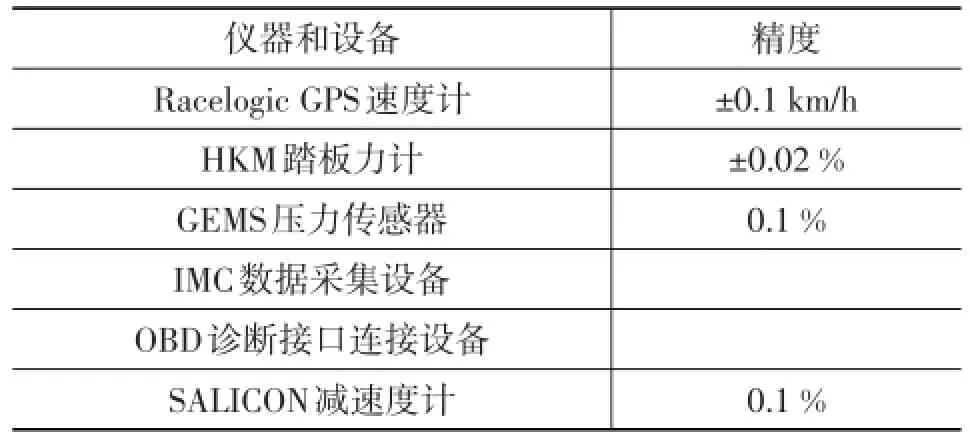
表3 试验用仪器和设备
6.2 试验方法
由于试验中该整车的SOC值随试验的进行逐渐衰减,所以SOC值设定为50%、18%和15.5%。试验起点选取海拔高度为2 830 m处,从发动机起动开始,调整初始真空度接近大气压水平并通过规律制动来采集真空度数据,并采集踏板力、进气歧管侧真空度、电子真空泵启停信号等数据,客观评价真空度的影响因素。
6.3 试验结果
6.3.1 冷起动下不同发动机水温试验
车辆行驶到目标地点一段时间后SOC值变为50%,在起动发动机前使得制动真空度为零,起动发动机并保持空挡,此时真空度压力从低值增加到接近大气压的水平。再踩下制动踏板使EVP过载,过载时间持续约为30 s。EVP过载后进入工作模式,此时真空压力值逐渐上升,直至恢复到接近大气压水平的真空压力值。图4为发动机水温分别为8.3℃和13.5℃时的试验结果,其中真空泵工作状态中的0代表真空泵不工作,1.00表示真空泵进入工作状态。
由图4a可看出,发动机水温为8.3℃时,试验过程中最大真空度为39.7 kPa,从EVP过载到真空度恢复到30.0 kPa时所消耗的时间为3.04 s,定义其为过载恢复响应时间;由图4b可看出,当发动机水温达到13.5℃时,最大真空度可达42.6 kPa,过载恢复响应时间为1.98 s,比水温为8.3℃时缩短了1.06 s。
6.3.2 怠速行驶工况下扭矩限制试验
冷起动试验结束后进行怠速行驶下扭矩限制试验。分别在SOC值为15.5%和18.0%时起动发动机,使车辆怠速行驶并将车辆所有电器负荷调至最大,在线标定为EVP过载。在SOC值为15.5%时,当真空度稳定在接近大气压时即开始制动,共实施6次制动,试验结果如图5a所示;在SOC值为18.0%时,首先通过连续的制动使得真空度为零,待真空度经历恢复阶段后开始制动,制动次数为7次,试验结果如图5b所示。试验时每隔5 s实施50 N左右的制动踏板力,以检测真空度的变化情况。试验前采取驾驶员扭矩需求为负值时限制发动机扭矩的策略,即驾驶员还未实施制动措施时已经限制扭矩,通过EMS请求将节气门开度减小或延后点火提前角达到扭矩限制的目的。
当未调整扭矩限制策略且SOC值为15.5%和18.0%时,真空度稳定值分别为22.14 kPa和35.57 kPa。真空度稳定值为22.14 kPa时,制动时感觉踏板偏硬,驾驶员需要持续施加较大的踏板力;而当真空度稳定值为35.57 kPa时制动感觉明显提升,能在期望的时间内使车辆停稳。图5是将扭矩限制策略调整为20 N·m以下限制扭矩后的试验结果,从图5a可看出,当发动机扭矩需求调整为20 N·m以下开始限制扭矩后,SOC值为15.5%时的真空度稳定值为31.55 kPa,比未调整前上升了9.41 kPa,此时制动感觉良好,制动实施时主观感觉制动可靠。
6.3.3 驾驶员首次制动踏板力调整试验
怠速行驶试验结束后进行直线行驶试验。起动发动机前通过连续踩制动踏板将真空度降为零。试验过程中每隔10 s实施不同的制动踏板力来检测真空度的变化,采集每次制动前、后真空度的变化数据。
试验结果如图6所示。由图6可看出,当制动踏板力为50 N时,制动前真空度稳定值约为36.45 kPa,制动后真空度最小值为24.16 kPa。而当调整制动力为40 N时,制动前真空度稳定值约为38.52 kPa,制动后真空度最小值为27.21 kPa。当首次制动力较小时,制动真空度还未被完全消耗,在下一次制动实施前真空度恢复的初始点比首次制动力为50 N时要高,此时更容易满足后续制动的真空度需求。在高原环境下行驶时应保证首次制动踏板力较小,以满足后续制动的真空度需求。
6.3.4 串联工况下扭矩限制
试验车辆SOC值为15.5%,启动发动机前将真空度降为零,将混合动力车辆的动力模式调整为串联模式,且全油门加速至20 km/h、50 km/h,并通过实施均匀制动来检测试验过程中真空度的变化。当车辆静止未限制扭矩时,车速为20 km/h和50 km/h对应的真空度稳定值分别为15.02 kPa和10.47 kPa,车辆制动性能不可接受,真空度稳定值过低导致制动感觉偏硬,制动力明显不足,制动感觉较差。为提高串联模式下的真空度水平,更改标定使得静止时开始扭矩限制,即扭矩需求为零或负值时EMS已经通过将节气门开度减小或延迟点火角来限制扭矩的输出。
针对车速不同、未经过扭矩限制,真空度稳定值并不满足高原制动性能要求的情况下,将全油门加速至20 km/h、50 km/h的两种工况调整为提前限制扭矩,限制扭矩后的试验结果如图7所示。由图7可看出,在车速为20 km/h工况下,真空度稳定值为38.54 kPa;在车速为50 km/h工况下,真空度稳定值为37.31 kPa,两种工况下的真空度稳定值均能满足要求,且制动感觉良好。
1 刘惟信.汽车制动系的结构分析与设计计算.北京:清华大学出版社,2004.
2 Sunao Hano,Motomu Hakiai.New Challenges for Brake and Modulation System in Hybrid Electric Vehicles(HEVs)and Electric Vehicles(EVs).SAE International.2011-39-7210.
3 Massimo Rundo,Politecnico di Torino.Modelling and Simu⁃lation of brake Booster Vacuum Pumps.SAE International.2013-01-9016.
4 林逸,贺丽娟,何洪文,等.电动汽车真空助力制动系统的计算研究.汽车技术,2006(10).
5 陈士杰.轿车整车动态真空度试验与分析.机械制造与研究,2011,40(6).
6 日本自动车技术会.汽车工程手册7整车试验评价篇.北京:北京理工大学出版社,2010.
(责任编辑文 楫)
修改稿收到日期为2015年6月16日。
6 结束语
通过对液力缓速器制动力矩数学模型的分析,提出了一种基于神经网络的可以逼近实际输出制动力矩的非线性曲线特性的液力缓速器制动力矩模型,并建立了液力缓速器的神经网络的PWM控制系统。通过试验表明,相比现有的制动力矩数学模型,基于神经网络的液力缓速器输出力矩能更好地逼近实际的制动力矩特性曲线,因此研究神经网络的制动力矩控制系统对于液力缓速器控制系统的设计有实际意义。
参考文献
1 Ren He,Haijun Shen,Xiaojun Yang.Review of auxiliary braking technologies of commercial automobile.Journal of Traffic and Transportation Engineering,2009,9(2).
2 吴超,徐鸣,李慧渊,等.车辆液力缓速器特点及发展趋势.车辆与动力技术,2011,121(1):51~55.
3 陈波.电控液力流缓速器试验方法的研究:[学位论文].长春:吉林大学,2009.
4 严军.车用液力流缓速器设计理论及控制方法的研究:[学位论文].江苏:江苏大学,2009.
5 Xi Liu,Xiusheng Cheng.Research and Development of Inte⁃grative Performance Test Bench of Hydraulic Retarder.Pro⁃ceedings of 2010 International Conference on Computer,Me⁃chatronics,Control and Electronic Engineering(CMCE 2010)Volume 2.
6 陆中华,陈秀生.重型车液力缓速器制动性能仿真研究.汽车技术,2009(3):22~24.
7 黄俊刚,李长友,童军,等.液力缓速器制动力矩影响因素分析.机床与液压,2010,38(15):77~80.
8 许镇琳,王豪,张海华.基于神经网络的电动转向系统助力特性研究.汽车工程,2004,26(3):319~321.
9 傅强,胡上序,赵胜颖.基于PSO算法的神经网络集成构造方法.浙江大学学报(工学版).2004,38(12):1596~1660.
(责任编辑文 楫)
修改稿收到日期为2015年6月1日。
Research on Factors Affecting Braking Vacuum of Hybrid Vehicle in High Altitude
Jian Yingjie,Xu Yun,Qiu Xiaoyin,Li Nan
(SAIC Motor Corporation)
Factors affecting braking vacuum of plug-in hybrid electric vehicle(PHEV)are elaborated in this paper.The strategies of negative pressure braking boosting are adjusted based on output conditions of hybrid electric vehicle,and operating plan in high altitude is developed according to operating characteristic of electronic vacuum pump,and vehicle experimental research in typical conditions is carried out.The results show that after the strategies are adjusted,the braking vacuum of this PHEV is improved effectively,and can satisfy the braking requirement in high altitude.
Hybrid Electric Vehicles,Vacuum Boost,Electronic Vacuum Pump(EVP),Braking at High Altitude
混合动力汽车 真空助力 电子真空泵 高原制动
U467.1
A
1000-3703(2015)10-0035-06
