发射组件监控模块的设计
2015-01-01徐湘宁
徐湘宁
(南京电子技术研究所, 南京210039)
0 引言
监控模块是发射组件监测和控制的核心,主要对发射组件进行工作状态采集和射频开关控制。监控模块可实现发射组件输入功率检测、输出功率检测、工作电流测量和温度测量等功能。同时,上位机可通过控制局域网(CAN)总线发出状态查询命令和射频开关命令来实现发射组件工作状态的查询和射频开关的控制[1]。
1 硬件电路设计
1.1 背板设计
背板对外采用高密度的微矩形插座,输入为双路5 V电源、发射组件工作状态和工作电流采样信号,输出为射频开关控制,与上位机信息交换采用CAN通信方式。电源线连接一般采用双线或多线,输入状态量、输入模拟量和输出控制分组连接。背板对内采用直插的矩形插座,可方便检测控制板调试时的拔插。
1.2 检测控制板设计
检测控制板负责发射组件的数字量采集、模拟量采集、工作状态CAN总线上报和射频开关控制。检测控制板主要由光耦电路、差分接口电路、模拟运放电路、看门狗电路、DSP供电电路、DSP处理单元、时钟电路、串行存储单元、测温电路、输出控制电路和CAN总线接口电路组成[2]。
检测控制板的原理框图如图1所示。光耦电路和差分接口电路将发射工作状态及差分输入转换成DSP能处理的数字电平。模拟运放电路将发射工作电流采样电压放大后送至DSP进行模/数(A/D)转换处理。看门狗电路为DSP提供实时的工作监测,当DSP工作软件运行异常时,看门狗电路为DSP提供复位信号。DSP供电电路将5 V输入转换为DSP工作需要的3.3 V电源和1.8 V电源。时钟电路提供DSP运行时的工作时钟。DSP通过I2C总线实现串行存储单元读写及测温电路数值读取,通过输出控制电路实现射频开关控制,通过CAN总线接口电路实现与上位机的CAN通信[3-10]。
1.3 信号传输抗干扰设计
发射组件监控模块对外信号接口一般为数字信号,为了提高信号传输的抗干扰能力,一般采用差分传输、光耦传输及电平转换等方法。
差分传输是将一个TTL电平转换为一个差分对后输出。输出线一般采用带屏蔽的双绞线,可大大降低共模干扰和空间干扰。差分传输要注意将差分发送芯片与发送接收芯片的地电位差控制在1 V以内,这样可保证差分发送芯片与发送接收芯片的长期可靠工作。
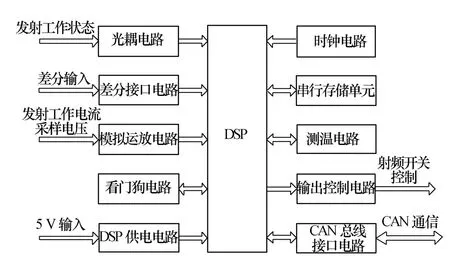
图1 检测控制板原理框图
光耦传输是将待发送信号进行光电隔离后的一种传输方式。光耦两端使用不同的直流电源供电,可避免外部大功率电路工作时对发射监控模块内部数字信号的影响。
电平转换是将低电平信号转换为高电平信号输出。该方式一般用于发射组件内部模块的开关控制,通常将TTL控制电平转换为12 V电平或24 V电平进行射频通断控制。
1.4 印制板抗干扰设计
印制板抗干扰设计包括印制板走线、器件布局和覆铜等方面。
印制板走线要注意以下四个事项:(1)信号线走线不能太细,线宽最好不小于0.3 mm;(2)数字信号线与模拟信号线间要有合适的安全间距,防止线间的干扰;(3)电源线一定要尽可能的粗,减小印制线上的电源压降;(4)高速信号线在印制板内的走线要尽可能短。
器件布局要做到以下三点:(1)对输入电源电压变化敏感的器件要靠近电源输入端放置;(2)数字电路与模拟电路要分区放置;(3)相互连线较多的几个器件要就近放置。
覆铜要注意以下两个方面:(1)覆铜不要覆全铜,最好覆成网格状;(2)主电源的电源和地要大面积覆铜。
1.5 结构抗干扰设计
结构抗干扰设计主要有以下三个方面的内容:(1)要尽量保证发射组件监控模块外装金属盒的结构完整性,做到金属盒的开口面积尽可能小;(2)射频信号输入与数字信号输入采用不同的插座,防止射频干扰;(3)发射组件监控模块与射频工作电路放在发射组件不同的腔体中,距离尽可能远。
2 软件设计
监控模块软件完成发射组件的初态设置、工作状态采集、工作电流采集、输出控制和CAN通信,主要由初始化子程序、状态采集子程序、电流采集子程序、输出控制子程序和CAN通信子程序组成。
2.1 初始化子程序设计
初始化子程序主要完成DSP对外部IO接口的初始化和CAN通信初始化,需保证上电复位后射频开关控制在“关”状态,CAN通信口处于正常工作状态。初始化子程序流程图如图2所示。
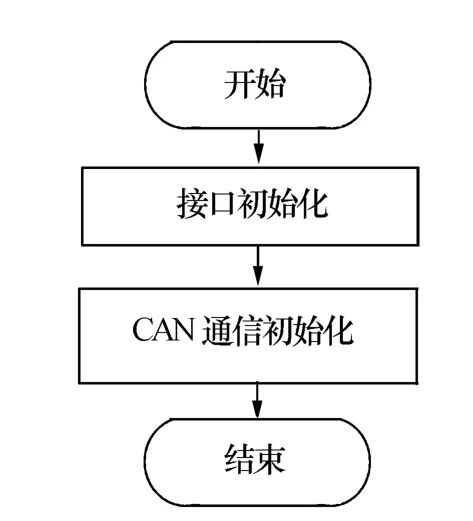
图2 初始化子程序流程图
2.2 状态采集子程序设计
状态采集子程序主要完成发射组件工作状态的采集,主要有输入、输出状态和过温状态,并将采集到的数据处理后置于状态存储区。当状态数据延时读取三次不相同时,重新读取状态数据。当新数据与旧数据相同时,不更新状态存储区。当新数据与旧数据不同时,更新状态存储区。状态采集子程序流程图如图3所示。
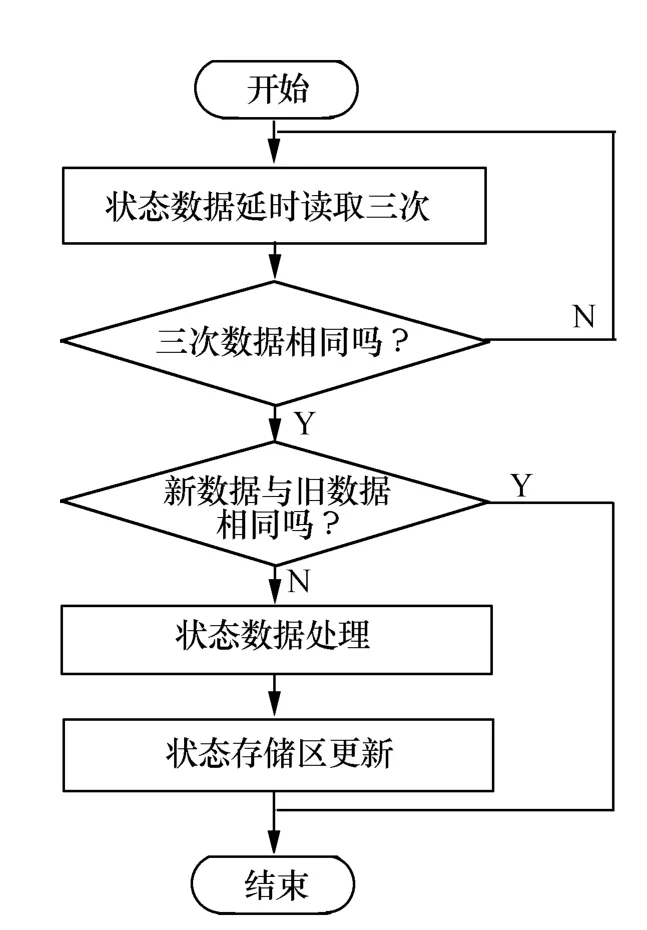
图3 状态采集子程序流程图
2.3 电流采集子程序设计
电流采集子程序负责发射组件工作电流采样电压A/D转换后的数值计算,并做一定的数值滤波。由于发射组件工作电流采样电压有零漂和一定的上下波动,当采样值不在正常范围内时,需进行采样值异常处理。当获得正确的采样值后,还需进行数值修正,再计算出正确的发射组件电流值。电流采集子程序流程图如图4所示。
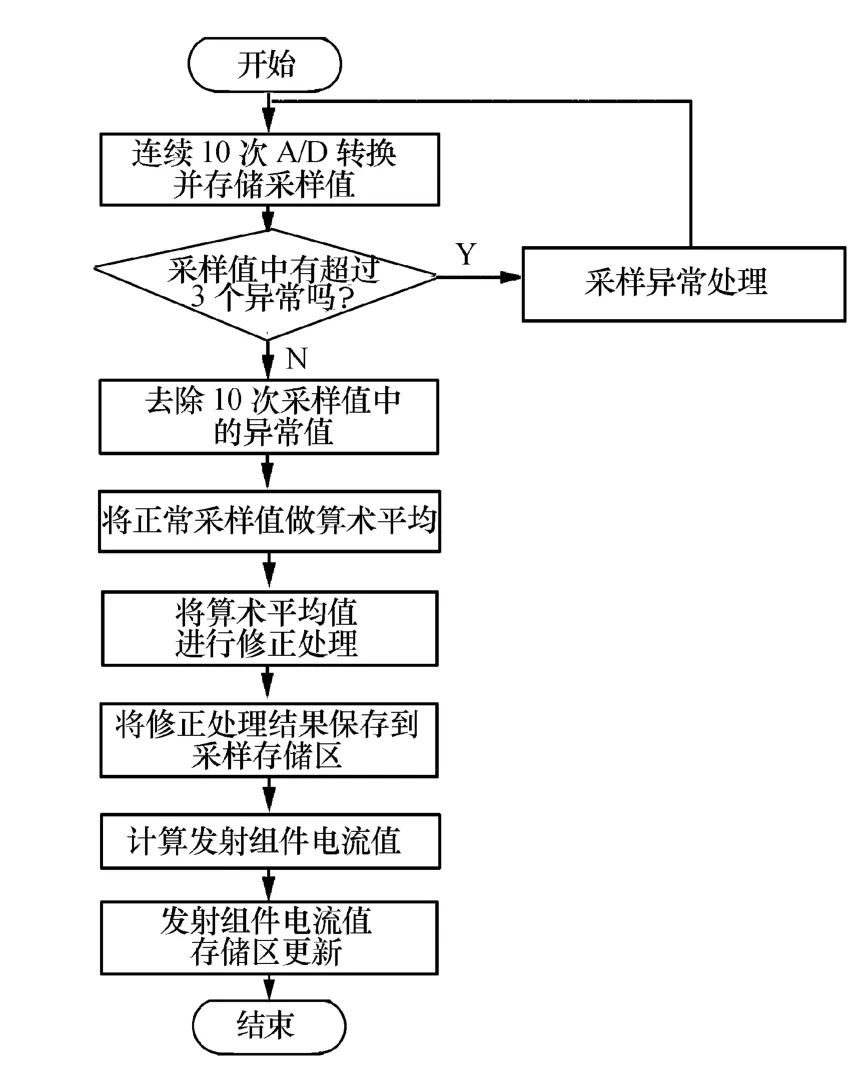
图4 电流采集子程序流程图
2.4 输出控制子程序设计
输出控制子程序主要用于发射组件射频开关控制和异常情况保护。当上位机发出射频开关控制指令时,输出控制子程序控制输出控制电路发出射频开关控制信号。当发射组件工作异常时,输出控制子程序控制输出控制电路发出射频关控制信号。输出控制子程序流程图如图5所示。
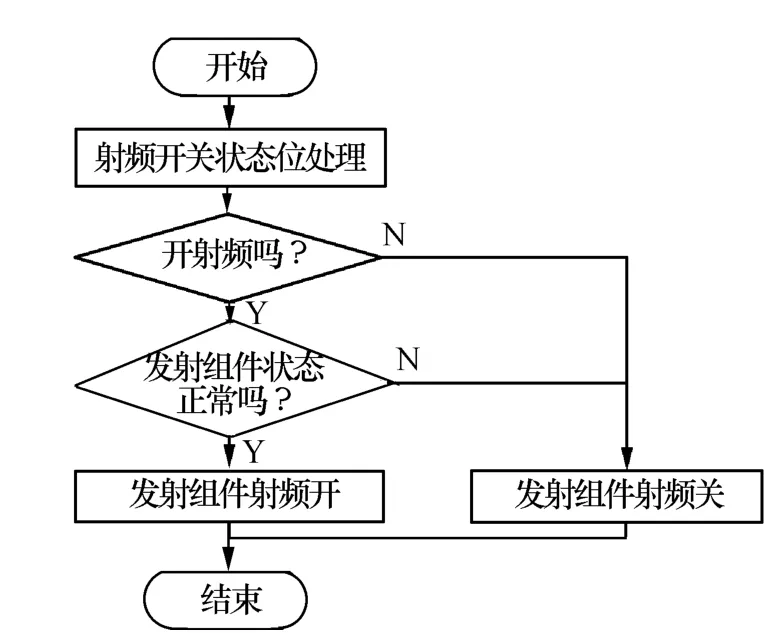
图5 输出控制子程序流程图
2.5 CAN通信子程序设计
CAN通信子程序主要负责上位机控制命令接收和发射组件工作状态上报。CAN通信接收采用中断方式,当收到状态查询指令时上报发射组件的工作状态,当收到发射组件射频开关指令时控制发射组件射频开关。
通信报文的设计要遵循以下四项原则:
(1)报头与报尾定义要具有唯一性,必要时可采用双字节校验;
(2)在报文中加入节点号字节以方便进行辅助校验;
(3)传输的数据字节不能与报头或报尾相同,最好每个字节只用7个数据位;
(4)报文长度尽可能短,减少被干扰概率。
CAN通信子程序流程图如图6所示。
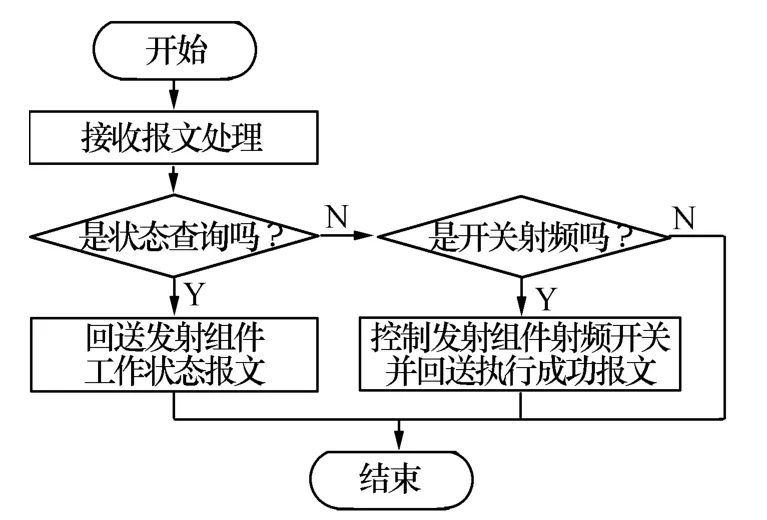
图6 CAN通信子程序流程图
3 结束语
本文提供了一种简单、实用的发射组件监控模块实现方法,并对发射组件监控模块的硬件设计、抗干扰设计和软件设计进行了详细描述。在实际设计中,还应注意DSP供电电路和DSP芯片的散热设计。此外,通信接口还可扩充RS422和RS485等通信方式。当需要远程控制时,可外加CAN转以太网的转换模块,使发射组件的监控方式更加灵活。
[1]王 强,李冬芳,荣大伟.CAN总线嵌入式系统在发射机中的应用[J]. 现代雷达,2007,29(7):72-74,79.Wang Qiang,Li Dongfang,Rong Dawei.Application of CAN bus embedded-system in transmitter[J].Modern Radar,2007,29(7):72-74,79.
[2]胡建东,吕方明,黄 幸.雷达电源监控系统设计[J].现代雷达,2008,30(1):93-96.Hu Jiandong,Lü Fangming,Huang Xing.Design of monitor and control system for power supply in radar[J].Modern Radar,2008,30(1):93-96.
[3]任润柏,周荔丹,姚 钢.TMS 320 F28X源码解读[M].北京:电子工业出版社,2010.Ren Runbai,Zhou Lidan,Yao Gang.TMS 320 F28X sound code unscramble[M].Beijing:Publishing House of Electronics Industry,2010.
[4]赵世廉.TMS320X240xDSP原理及应用开发指南[M].北京:北京航空航天大学出版社,2007.Zhao Shilian.TMS320X240xDSP principle and application guide[M].Beijing:Beihang University Press,2007.
[5] 宁改娣,杨拴科.DSP控制器原理及应用[M].北京:清华大学出版社,2002.Ning Gaidi,Yang Shuanke.DSP control theory and application[M].Beijing:Tsinghua University Press,2002.
[6]刘和平.TMS320LF240x DSP C语言开发应用[M].北京:北京航空航天大学出版社,2003.Liu Heping.TMS320LF240x DSP C language exploitation and application[M].Beijing:Beihang University Press,2003.
[7] 江思敏.TMS320LF240x DSP硬件开发教程[M].北京:机械工业出版社,2003.Jiang Simin.TMS320LF240x DSP hardware exploitation guide[M].Beijing:China Machine Press,2003.
[8] 颜友钓,朱宇光.DSP应用教程[M].北京:中国电力出版社,2002.Yan Youdiao,Zhu Yuguang.DSP application guide[M].Beijing:China Electric Power Press,2002.
[9]李哲英,骆 丽,刘元盛.DSP基础理论与应用技术[M].北京:北京航空航天大学出版社,2002.Li Zheying,Luo Li,Liu Yuansheng.DSP basic theory and application technique[M].Beijing:Beihang University Press,2002.
[10]郑 新,李文辉,潘厚忠.雷达发射机技术[M].北京:电子工业出版社,2006.Zheng Xin,Li Wenhui,Pan Houzhong.Technology of radar transmitter[M].Beijing:Publishing House of Electronics Industry,2006.