一种超宽带雷达多人体目标跟踪算法
2015-01-01刘金超
刘金超,辛 勤
(国防科学技术大学电子科学与工程学院, 长沙410073)
0 引言
短距离人体跟踪在安全领域应用上非常重要,如机场安全检查和穿墙侦察恐怖分子。超宽带雷达的超宽带和高分辨率特性,使其非常适合短距离人体跟踪,尤其是在可视条件差和穿墙检测中,更能充分发挥其作用。
本文重点对超宽带雷达多个运动人体目标的检测和跟踪方法进行了研究。传统的恒虚警检测(CFAR)在对多个相距很近,甚至交叉、重叠时的人体目标进行检测时,会出现严重的目标遮蔽现象[1],而CLEAN算法通过找出当前数据的最大值,并去除它所对应的旁瓣响应,既很好地保留了目标信息,又能够提取出人体多个散射点并记录下每个散射点的到达时延;通过CLEAN算法检测出的人体目标散射点多而且分布相对集中,传统最近邻数据关联算法(Nearest Neighbor Data Association,NNDA)[2]计算简单、有效,但不适用于多个人体目标的环境;而经典的多目标跟踪算法:如联合概率数据互联算法(Joint Probabilistic Data Association,JPDA)[3]和多假设跟踪算法(Multiple-Hypothesis Tracking,MHT)[4]虽然能够对多个人体目标进行有效跟踪,但计算量易出现爆炸现象,不利于实时处理。为此,本文提出一种简易最近邻联合概率数据互联算法(CNNJPDA),该方法能够对数量较少轨迹交叉的人体目标进行实时、有效跟踪。
1 扩展目标检测
超宽带雷达发射信号大时宽带宽积的特性,决定了其具有高距离分辨率的能力,从而使人体目标的回波分布在不同的径向距离单元中,形成“距离扩展目标”[5-6]。每个距离单元内的回波就是一个有效量测,从而构成人体的多个散射点。这为研究多个人体目标的跟踪方法提供了一种新思路,但前提是要通过一定的数据处理能够提取出人体目标的多个散射点。CLEAN算法很好地解决了这一问题。
1.1 超宽带雷达波形散布模型
本文考虑的超宽带雷达结构,是由一个发射天线和一个接收天线组成。由于从人体各部位反射回来的超宽带电磁波的到达时间和幅度各不相同,它们中的每一个不同的散布路径都可以看成是超宽带雷达回波信号的组成部分。所以,超宽带雷达回波信号可以近似用一个特殊的多路径模型来描述

式中:ak和nk分别表示接收信号第k个成分的幅度和到达时间;p(t)是基本波形单元。每个路径的信号到达时延和幅度可以在扫描中通过使用CLEAN算法进行估计,如图1所示。
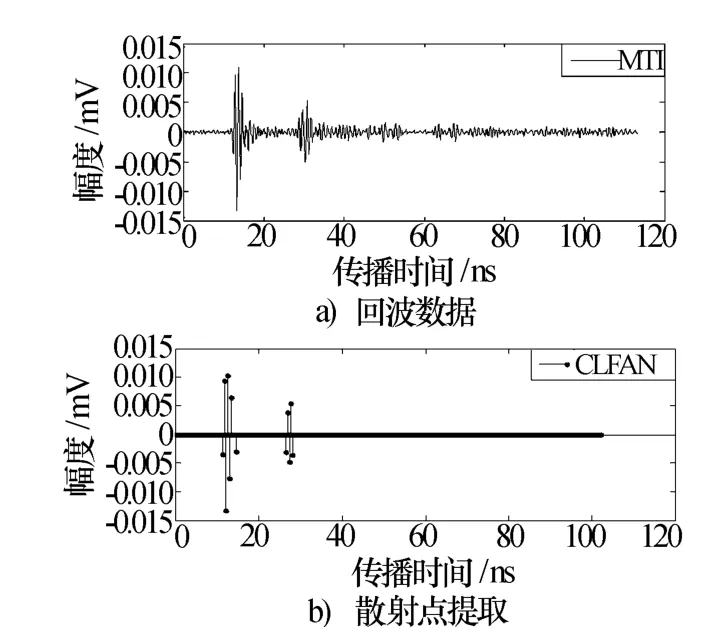
图1 CLEAN算法处理结果
1.2 CLEAN算法描述
Hogbom于1974年最早提出CLEAN算法[7],将其作为一个消卷积过程用于图像处理。Schwarz于1978年通过对CLEAN算法深入分析,得出CLEAN算法还是一个具有很高的信杂比的滤波过程。
实测数据分析结果表明,本文中人体目标回波信号较强。因此,使用CLEAN算法进行人体目标检测,通过对预处理后的数据进行后续处理的搜索迭代过程,即多次减去接收系统在强点位置的点扩展函数[8],提取出当前数据的最大值,从而使人体散射点中能量最强的几个被提取出,其他散射点及杂波则被有效抑制。具体算法流程如下:
第一步,输入波形模板:s(t)和检测门限:Tclean。
第二步,设每次扫描中开始剩余波形d0(t)=w(t)。初始i=0。

第四步,重复计数:i←i+1。
第六步,回到第三步。
经CLEAN之后的图像已经非常“干净”,并且由图1b)可以看出人体多个散射点都能够提取出来。由于人体目标在运动时身体各部位及观测角度时刻都在变化,所以,每次扫描的有效量测(散射点)数目也都在变,通过设定适当的门限Tclean(这里取经验值Tclean=1×10-3),使得每次扫描的各个目标的有效量测数目都在一定范围内(经多次观察,能量最强的散射点都集中在1~7个),确保下步跟踪算法的实现。
2 多个人体目标跟踪
通过CLEAN算法检测出的人体目标散射点多而且分布相对集中,因此,在进行跟踪时,不同的数据关联算法各有利弊:最近邻数据关联算法(NNDA)虽计算简单,但在多目标环境下(特别是相距较近或轨迹交叉的目标),易出现误跟和丢失目标的现象;联合概率数据互联算法(JPDA)和多假设跟踪算法(MHT)虽然能够对多个人体目标进行有效跟踪,但计算量易出现爆炸现象,不利于实时处理。针对如何对多个轨迹交叉的人体目标进行有效跟踪,并减少计算量的问题,本文提出一种简易最近邻联合概率数据互联算法(CNNJPDA)。其主要思想是基于人体目标散射点多且分布相对集中的特点,从每个目标的跟踪波门内选取统计距离[9]最小的三个候选回波作为最终候选回波,若其中有一个以上(含一个)不在不同目标相关波门的重叠区域内,则选取其中统计距离最小的候选回波作为目标回波,用于对目标状态进行更新。若三个统计距离最小的候选回波均在不同目标相关波门的重叠区域内,则以三个统计距离最小的候选回波与目标关联概率求取融合值,作为等效测量对目标轨迹进行更新。具体算法流程如下:
1)设置跟踪波门。其作用是确定被跟踪目标观测值出现的范围,其中心就是被跟踪目标的预测位置,其大小结合正确接收回波的概率和目标散射点的分布确定,其形状采用二维跟踪门形状中的椭圆形。
2)确定候选回波,即目标的量测值zj(k)是否满足
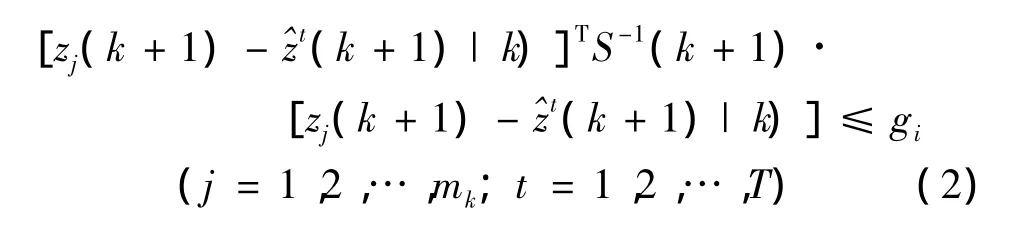
3)计算每个跟踪波门内所有测量值与预测值的最小统计距离min djt(第j个量测与第t个目标的统计距离)

达到极小的量测,并从中选取三个min djt的回波(jt1<jt2<jt3)作为目标t的最终候选回波。

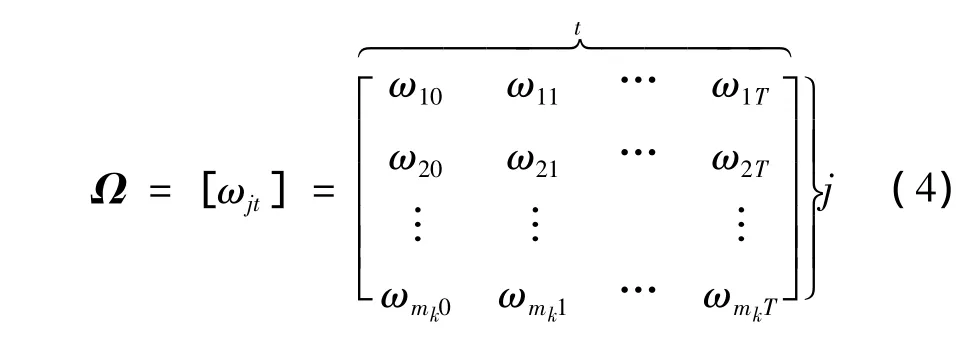
式中:ωjt=1,表示量测j位于目标t的确认波门内;ωjt=0,表示量测j位于目标t的确认波门外(j=1,2,…,mk;t=1,2,…,T)。t=0 表示没有目标,mk为 k时刻观测数目。
由确认矩阵Ω得到该时刻的公共回波集合Pub
若Pub=0,则量测jt1作为目标回波,用于对目标t状态进行更新;若Pub≥1,且量测jti∉Pub,则统计距离最小的量测jti(i=1,2,3)作为目标回波,用于对目标 t状态进行更新;若 Pub≥1,且量测 jt1,jt2,jt3∈Pub,则以量测jt1,jt2,jt3分别与目标关联概率求取融合值,作为等效测量对目标轨迹进行更新。注意,在每次确认Pub之前,将Pub清零。如图2所示。

图2 量测j13被用于对目标1轨迹进行更新
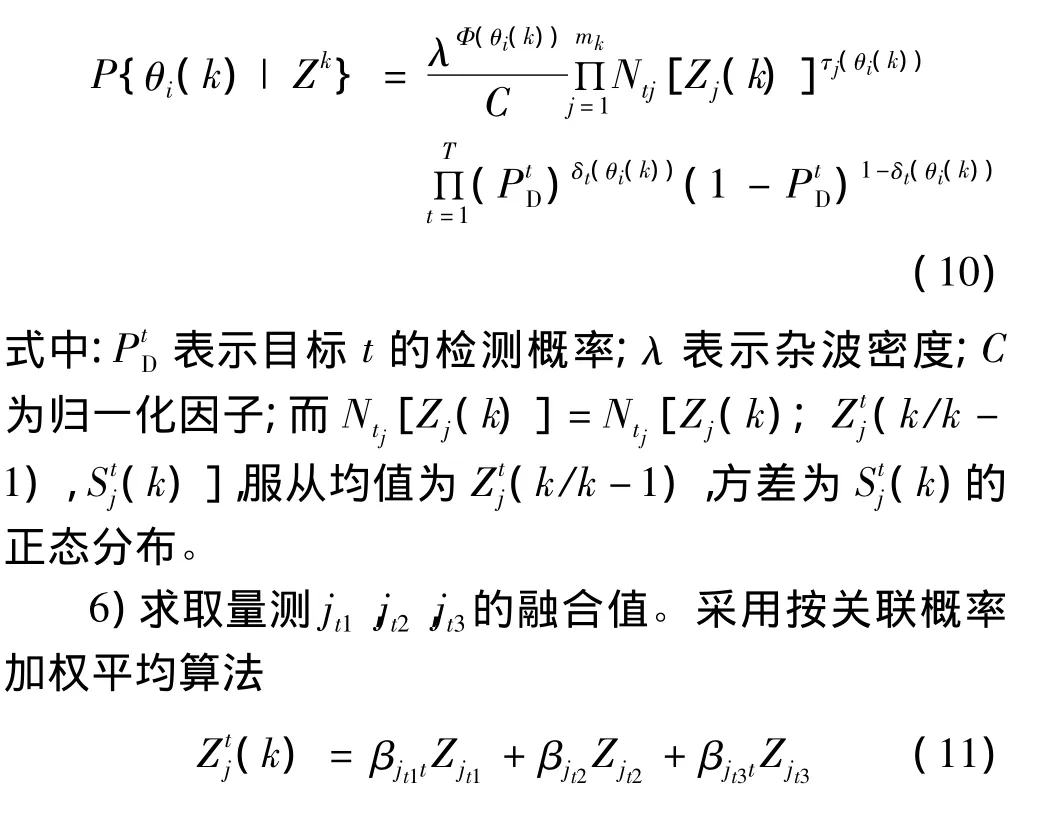
5)计算量测 jt1,jt2,jt3与目标 t互联的概率。
关联事件:θjt(k)表示量测j源于目标t(0≤t≤T)的事件,其关联概率为

(1)每个量测有唯一的源(目标或杂波),即

(2)每个目标最多有一个量测,即

表示任一量测在联合事件θi(k)中是否与目标t互联,δt(θi(k))称为目标检测指示器。量测互联指示为

表示在联合事件θi(k)中,量测j是否跟一个真实目标互联。因此在联合事件θi(k)中假量测的数为

对于Poisson杂波模型,联合事件θi(k)在k时刻的后验概率为
3 实验验证
利用该算法对超宽带雷达实测数据进行处理:雷达的工作带宽为800 MHz,采样频率为4.5 GHz,距离分辨率是0.187 m,更新时间间隔为0.12 s,扫描采样窗为113 ns。实验场景为:一个人在房间内以恒定速度朝雷达方向径直走来,另一个人在同一个房间内的不同角度以恒定速度朝远离雷达的方向径直走去,如图3所示。
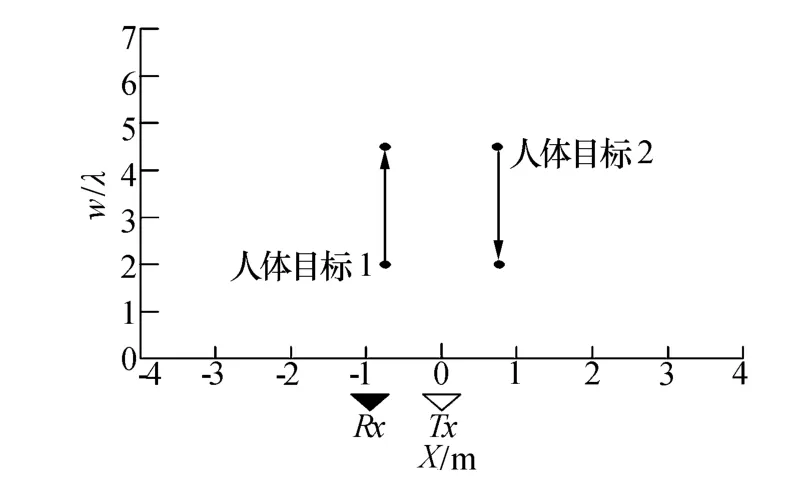
图3 两个人体在室内运动的路线
数据集先由信号预处理算法进行处理后再使用CLEAN算法进行处理。信号预处理算法由带通滤波器、耦合对齐、背景相消[10]和时间窗构成。其结果示于图4a)。
对预处理后的数据使用OS-CFAR检测的结果示于图4b),显而易见,在观测时间的1.5 s~3 s内,存在严重的目标遮蔽现象;因此,在OS-CFAR检测后使用NNDA算法进行跟踪[11]时,在两目标轨迹交叉期间,出现了丢失目标2的现象。其结果示于图4c)。
而经CLEAN处理后,则有效抑制了目标遮蔽现象,而且几乎所有的多径和杂波在这个环节都被很好地被消除,如图4d)。
图4e)和图4f)分别显示了经CLEAN处理后,使用CNNJPDA算法和NNDA算法对目标的跟踪结果。可见,NNDA算法在两个目标轨迹交叉后出现了错误跟踪目标的现象;而CNNJPDA算法则分别对两个目标进行了实时、正确的跟踪。

图4 对两个轨迹交叉的人体目标检测、跟踪结果
4 结束语
本文提供了一种超宽带雷达对多个人体目标进行跟踪的方法。将人体目标视为扩展目标,使用CLEAN算法提取出人体多个散射点,而后找出人体目标众多候选回波中的统计距离最小的三个最终候选回波,从中选出一个或求出三个的等效回波用于对目标的轨迹进行更新。从而实现对轨迹交叉人体目标的有效跟踪,但由于多个运动人体跟踪情况非常复杂,只选用了两个人情况验证有效性。下一步将重点研究当人体目标数大于两个且在跟踪期间有变化时的目标检测及数据关联算法。
[1]Richards M A.雷达信号处理基础[M].邢孟道,王 彤,李真芳,等译.北京:电子工业出版社,2008:220-286.Richards M A.Fundamentals of radar signal processing[M].Xing Mengdao,Wang Tong,Li Zhenfang,et al,trans.Beijing:Publishing House of Electronics Industry,2008:220-286.
[2]He Y,Savelyev T,Yarovoy A.Two-stage algorithm for extended target tracking by multistatic UWB radar[C]//IEEE CIE Radar Conference.Chengdu:IEEE Press,2011(6):569-572.
[3]吴佳芯.多目标跟踪的数据关联算法研究[D].西安:西安电子科技大学,2013:10-40.Wu Jiaxin.Research on data association algorithms of multitarget tracking[D].Xi'an:Xidian University,2013:10-40.
[4]Chang S H,Wolf M,Burdick J W.An MHT algorithm for UWB radar-based multiple human target tracking[C]//IEEE International Conference on Ultra-wideband Vancouver,BC:IEEE Press,2009(9):9-11.
[5]何 友.雷达目标检测与恒虚警处理[M].2版.北京:清华大学出版社,2011:266-289.He You.Radar target detection and CFAR processing[M].2nd ed.Beijing:Tsinghua University Press,2011:266-289.
[6]刘 刚,王春阳.一种超宽带运动目标检测雷达[J].现代雷达,2000,22(5):1-4,17.Liu Gang,Wang Chunyang.A kind of ultra-wide-band moving target detection radar[J].Modern Radar,2000,22(5):1-4,17.
[7]Masoom H,Adve R S,Cobbold R S C.Target detection in diagnostic ultrasound:evaluation of a method based on the CLEAN algorithm[J].Ultrasonics,2013,53(1):335-344.
[8]林清源,王彦平,洪 文.一种基于CLEAN的SAR图像旁瓣抑制方法[J].中国科学院研究生院学报,2011,28(3):355-359.Lin Qingyuan,Wang Yanping,Hong Wen.A SAR image side-lobes reduction method based on CLEAN[J].Journal of the Graduate School of the Chinese Academy of Sciences,2011,28(3):355-359.
[9]赵艳丽,林 辉,赵 锋,等.多目标跟踪中的数据关联和航迹管理[J].现代雷达,2007,29(3):28-31.Zhao Yanli,Lin Hui,Zhao Feng,et al.Data association and track management in multitarget tracking[J].Modern Radar,2007,29(3):28-31.
[10]贺 峰,朱国富,牟妙辉,等.超宽带穿墙雷达对人体动目标探测的实验研究[J].现代雷达,2010,32(7):29-33.He Feng,Zhu Guofu,Mou Miaohui,et al.Experiment study of life locomotion detection based on UWB through wall radar[J].Modern Radar,2010,32(7):29-33.
[11]吴 涛,张怀根.一种基于多目标的角度时延联合跟踪算法[J].现代雷达,2010,32(8):54-57.Wu Tao,Zhang Huaigen.A joint angle-delay tracking algorithm based on multiple targets[J].Modern Radar,2010,32(8):54-57.