“海马”号4500米级ROV系统研发历程
2015-01-01马厦飞
连 琏,马厦飞,陶 军
(1. 上海交通大学海洋研究院,上海 200030;2. 上海交大海科(集团)有限公司,上海 200231;3. 广州海洋地质调查局,广州 510075)
0 引 言
深海潜水器技术与装备作为海洋探查和资源开发利用不可或缺的手段,同时也是制约“开拓深海和大洋”的瓶颈,在一定程度上标志着国家海洋资源勘探开发甚至海洋权益维护能力和科技水平。发展该项技术不仅对国民经济和社会发展以及国家军事安全有极为重大的意义,还对未来的海洋空间利用、海洋旅游业、深海打捞、救生等有着不可估量的价值和战略意义。与世界先进国家相比,目前我国的海洋装备技术水平还存在着一定的差距,尤其是面向深海的装备技术水平差距较大,诸多关键技术仍为少数发达国家所垄断,严重制约了我国参与国际海洋竞争的能力。为此,《国家中长期科学和技术发展规划纲要(2006~2020年)》在重点任务中提出“重点支持深(远)海环境监测、资源勘查技术与装备,深海运载和作业技术与装备成果的应用”,国家863计划海洋技术领域于2008年年底启动了重点项目“4500米级深海作业系统”,其主要装备成果是4500m无人遥控潜水器(Remotely Operated Vehicle,ROV)。2009年,科技部、国家海洋局联合发布了《国家深海高技术发展专项规划(2009~2020)》,深海潜水器技术与装备作为重大项目列入其中,“4500米级深海作业系统”重点项目作为该重大项目的主要任务之一,与 4500m载人潜水器(Human Occupied Vehicle,HOV)、4500m自治式潜水器(Autonomous Underwater Vehicle,AUV)共同构成4500m水深级的装备体系,形成我国4500m水深级的综合探查和作业能力。
1 “海马”号作业系统
1.1 系统构成
4500米级深海作业系统的主要装备成果是“海马”号4500m无人遥控潜水器(ROV)。ROV为无人、有缆系统,不同于载人潜水器,它通过脐带缆与水面母船连接,脐带缆担负着传输能源和信息的使命,母船上的操作人员可以通过安装在ROV上的摄像机实时观察到海底状况,并通过脐带缆遥控操纵ROV及其机械手、配套的作业工具,从而实现水下作业。由于是无人有缆系统,ROV具有作业能力强、作业时间不受能源限制、无人员风险等优点。因而成为水下作业、尤其是深海作业不可缺少的装备。
“海马”号4500m ROV 装备有水下摄像/照相系统、声纳、作业工具、多功能机械手,并有可更换的、不同功能的水下作业底盘,除了具有水下摄像/照相、定位和取样等功能外,还具有辅助海底观测网布放维护的功能。“海马”号是我国首台套国产化率达到90%的深海ROV系统,也是目前我国自主研制的工作水深和系统规模最大的ROV系统。
“海马”号作业系统的主要构成(见图1):① 作业母船(海洋六号船);②、③ “海马”号ROV水面控制系统;④ 甲板吊放回收系统,包括移动绞车、脐带缆和升沉补偿装置;⑤ A形架和止荡器;⑥ “海马”号ROV本体;⑦ 水下作业工具系列;⑧ 深海水下升降装置。
“海马”号ROV本体的基本构成如图2所示,基本配置如表1所示。

图1 “海马”号作业系统的主要构成
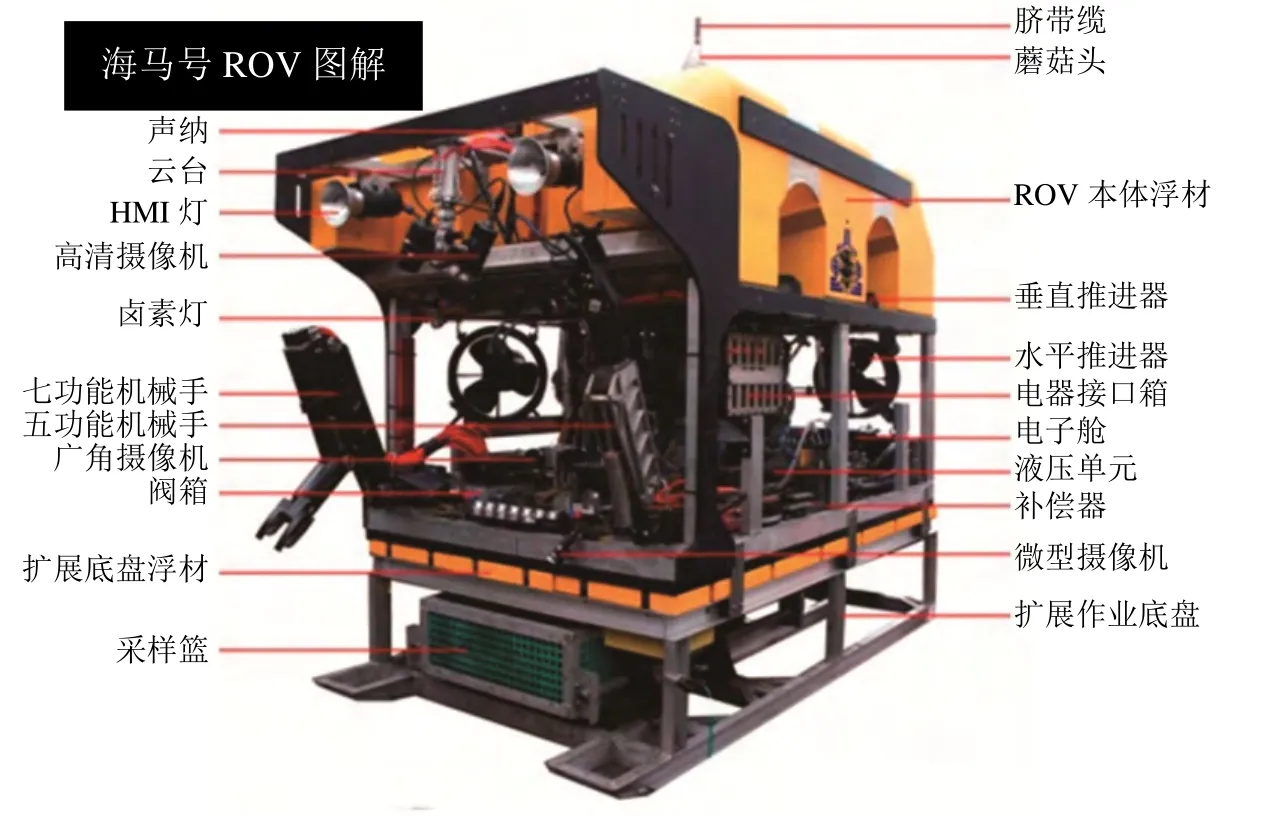
图2 “海马”号ROV本体的基本构成

表1 “海马”号ROV本体主要配置
1.2 “海马”号研发及海试情况
为加强装备开发的实用性,科技部创新了项目管理模式,实行业主制管理机制,由国土资源部作为项目组织实施部门,其所属的广州海洋地质调查局作为业主单位牵头,上海交通大学作为项目的技术负责单位,联合浙江大学、青岛海洋化工研究院、同济大学和哈尔滨工程大学等国内业界优势研发力量,组成了优秀的协同创新研发团队开展研发工作。经过6a的不懈努力,突破了核心技术受控国外、国内技术产业配套能力弱等不利因素,坚持潜心攻关、勇于探索、敢于创新的团队精神,全面掌握了大深度无人遥控潜水器设计和研制、系统集成和联调、深海无人遥控潜水器控制和监测、远程高压电力传输与分配、长距离信息传输、在线绝缘检测、大深度水下液压动力源、推进与控制、大深度浮力材料制造、多功能作业机械手设计制造、大负荷升沉补偿和大深度潜水器考核试验等多项核心技术,实现了项目总体目标,使“海马”号ROV整套装备的国产化率达到90%,为我国无人遥控潜水器的国产化和产业化奠定了坚定基础。
按照863计划海上试验有关规定和要求,“海马”号ROV研发之初就明确研发完成的装备不再按照以往科研项目以试验样机或原理样机为验收目标,而是在研发成果交付使用之前,整体研发系统必须经过一系列严格的海上试验。为此,依托中国地质调查局海洋六号调查船,研发团队在2014年2月和3月期间安排两个海上考核试验航段、4月安排一个海试验收航段,圆满完成了“海马”号ROV所有91个技术考核项目的海上试验和验证,先后完成了17次海上试验下潜任务,3次到达南海中央海盆最深处4502m水深的海底进行作业试验。
按照海试大纲要求,广州海洋地质调查局于4月15~22日安排“海马”号ROV搭载海洋六号进行海上验收试验。4月17日,海洋六号航行到达“海马”号ROV进行海上试验的地点,距离广州市623n mile,水深4502m,这里地处南海中央海盆盆地,之前广州海洋地质调查局已对该区域开展了多波束海底测量,覆盖面积100(km)2,平均水深4490m左右。按照项目合同书要求,符合“海马”号ROV海上试验的水深要求。这次试验的主要任务是在4500m深海区对“海马”号ROV与升降装置进行联合作业试验,重点检验“海马”号ROV 与升降装置的最大作业水深,以及ROV在4500m水深下的定向、定高、定深航行能力,高精度水声定位能力、观测、通讯能力、海底作业能力、浮力材料性能等。
按照海试大纲,首先将搭载着海底取样器、海底热流探针、扩展缆模拟缆鼓和永久标志物等各项设备的升降装置,通过船上的塔吊提前布放到测试的海底。升降装置下潜到4502m海底。
4月18日,“海马”号ROV第16次下潜,到达海底后按照水下定位给出的定位指示,依次进行了定向、定高、定深航行测试。通过声纳和水下摄像机寻找并靠近已布放于海底的升降装置后“海马”号ROV坐底。操作“海马”号ROV上的7功能机械手穿插进行以下作业:1) 从采样篮上取出热流探针并两次插到海底进行探测,作业完成后回收至采样篮;2) 从采样篮上取出海底地震仪进行海底布放,并回收海底地震仪至升降装置;3) 从采样篮上取出海底沉积物取样器在海底进行取样后并回收到采样篮中;4) 从升降装置上取出永久性标志物并布放到海底;5) 从升降装置上将模拟的“黑匣子”装置取回至采样篮。操作“海马”号ROV上的5功能机械手进行了模拟的缆鼓布放作业。作业任务完成后又对“海马”号ROV进行了定高和定深测试,开展了海底摄像等作业,所有测试工作均正常。
试验完成了“海马”号ROV联合作业试验任务,下潜最大水深4502m,在海底进行了大量的机械手作业,取得了沉积物样品,获得了测试点的海底地热数据。“海马”号ROV 返回甲板后经潜后检查表明:1) 浮力材料性能良好;2) 深度计、高度计、罗盘、声呐、水下定位系统、温盐深测量系统及各耐压结构完好,功能正常;3) 水下控制系统、“海马”号ROV控制软件、水面集中控制系统、监视系统正常;4) 母船支持系统、升沉补偿装置工作正常。海试结果表明“海马”号ROV具有优良的深海作业能力,达到了在4500米级深海海底作业的各项技术性能设计要求,通过了863计划海洋技术领域办公室组织的海上验收,这标志着“海马”号ROV海上试验取得了圆满成功。
4月19日,“海马”号ROV又进行了第17次下潜,即试验性应用下潜,最大作业水深4502m。“海马”号ROV 到达海底后释放自拍装置(摄像机及其框架);围绕自拍装置进行定高、定深运动和自拍录像;测试5功能机械手,各动作正常;操作7功能机械手完成了热流探针探测、自拍装置回收等作业。整个试验过程中“海马”号ROV本体及各设备状态良好,功能正常。
“海马”号ROV成功研制是我国深海高技术发展进程中具有历史性意义的标志性成果,将对我国深海科学研究、深海资源探查与开发起到推进作用,对我国海洋装备战略性新兴产业的发展,尤其是深海大型ROV技术的工程化和产业化起到示范和辐射带动作用,有望迅速转化,成为深海调查的自主常规装备。通过“海马”号ROV的研制和海试,我国不仅全面掌握了大深度无人遥控潜水器设计建造和试验应用方面的各项关键核心技术,而且实现了90%的国产化率,打破了国外技术垄断,带动了相关配套产业的进步,也使我国初步具备了无人遥控潜水器的产业化基础。
2 “海马”号ROV研发成功的启示
1) 有效的组织实施模式,产学研用协同创新。本项目以国土资源部为组织实施部门,广州海洋地质调查局为业主单位,海洋六号综合科学考察船为作业母船,全力支撑协调上海交通大学为技术负责单位的科研团队研发活动,构建了产学研用协同创新的组织实施和管理模式。项目始终与我国基础性、公益性、战略性资源调查需求密切结合,以直接服务于深海资源探查应用为目标,充分发挥产学研用相结合的作用,调动和协调相关资源,有力地保障了项目的顺利实施。
2) 立足自主研发,开展国产化技术研究,全面掌握关键技术,实现“零的突破”。长期以来,我国海洋技术与装备水平和国际先进水平存在着很大的差距,尤其是深海技术与装备水平尚处于起步阶段,关键技术受到国外垄断。而美、日、法、俄等海洋技术先进国家已形成了集设计、制造、加工与应用等关键环节的产业链,技术水平与应用水平均非常成熟。因此,立足自主研发,攻克海洋技术装备相关配套水平低的难点,全面开展深海潜水器国产化技术研究,是掌握关键技术的必由之路。“海马”号的研制与海试成功标志着我国已具备大深度无人遥控潜水器自主设计制造的能力,有望持续推出自主知识产权的深海探测装备产品。
3) 形成了一支多学科交叉、研发与作业应用融合的团队。在“海马”号ROV的研制和海试过程中,研发团队经过6a来长期协作创新,以及海上的联合试验应用,在“海马”号ROV的研发与试验过程中积累了丰富的实际经验,同时业主单位的操作应用人员从项目伊始就参加了研发工作,对“海马”号ROV的海试成功起到了关键作用。通过项目的实施,培养出了一支集总体技术、机电、控制、材料等多学科研发团队及技术作业队伍。
3 结 语
国产化率达到90%的“海马”号ROV的成功研制使我国在大深度无人遥控潜水器领域实现了自主研发装备“零的突破”,为我国形成4500米级深海作业能力奠定了基础,也是继“蛟龙”号之后我国海洋技术领域的又一个标志性成果,对我国深海大型ROV技术的工程化和产业化将起到示范性和辐射带动作用。
深海ROV系统有着广阔的应用前景,不仅是海洋探查和资源开发利用不可或缺的手段,同时也是应对海底突发性事件的必备技术手段。“海马”号ROV系统不仅具有海底观测、机械手作业等功能,还能通过灵活的功能扩展和改造以适应不同海底作业任务的要求,在未来我国深海作业领域将发挥重要的作用。