3-RRR并联机构灵巧度分析
2014-12-31杜聿静
杜聿静,王 雷
(潞安职业技术学院,山西 长治 046204)
0 引言
当一并联机构处于奇异位形时,经计算可得出,该机构此时的雅可比矩阵为零或者趋于无穷大,这意味着该机构被刚化或者存在多余的自由度,此时机构的运动不能唯一确定,因此,机构应在实际操作中尽量地避免奇异位形。理论上讲,当并联机构的位姿接近奇异位形时,机构的雅可比矩阵会成为病态矩阵,继而造成机构逆矩阵的精度降低,这种衡量机构运动失真程度的指标称为灵巧度。并联机构的灵巧度属于一种运动学性能指标,它是用来描述机构输出运动(力)与输入之间的失真程度,同时还可以定量衡量机构远离奇异点的程度。雅可比矩阵的条件数、可操作数则是衡量并联机构灵巧度的常用指标。本文主要利用可操作数和条件数来对3-RRR并联机构进行灵巧度分析。
1 3-RRR并联机构三维模型的建立
SolidWorks软件是世界上第一个基于Windows开发的三维CAD软件系统。功能强大、易学易用和技术创新是SolidWorks软件的3大特点,这使得SolidWorks软件成为领先的、主流的三维CAD解决方案。由于SolidWorks软件能够提供多种不同的设计方案、极大地减少了设计过程中的错误,因而Solid-Works软件也成为机械设计行业中应用最广泛的三维建模软件之一。
首先利用SolidWorks软件建立出3-RRR并联机构的三维模型,如图1所示。该机构由3个相互并联的分支、静平台和动平台3部分构成。其中每个分支又由3个转动副串联而成,而且每个分支的结构和杆长完全一致。3个高度等各项参数完全一致的固定铰支座构成了3-RRR并联机构的静平台。3个分支下端分别铰接在静平台上,分支的另一端则铰接在三角形的动平台上。

图1 3-RRR并联机构模型
2 建立空间坐标系并计算各运动螺旋
根据所建立的三维模型,采用D-H法建立3-RRR并联机构的空间坐标系。当该机构处于任意位姿时,选取任一固定铰支座的旋转中心如点A为原点,点A与另外两个铰支座旋转中心点G、点D的连线AG、AD分别为x和z轴(AG⊥AD),垂直于3个固定铰支座所在平面且过点A的直线为y轴;同时假设与静平台相铰接的3个连杆均垂直于DOG面,与动平台相铰接的3个连杆均相对于铅垂线偏移同样的角度,故而,动平台与静平台在运动过程中一直保持着互相平行的关系,而且将动平台和静平台上的各铰接点分别连线后形成的两个三角形CFI和AGD为全等的直角三角形。由此,我们建立出该并联机构的空间坐标系[1],如图2所示。
根据螺旋理论公式计算机构的各螺旋:

其中:$n为螺旋,n=1,2,…,9;Sn为螺旋轴线的方向矢量,为螺旋的原部;S0n为螺旋轴线的位置矢量,为螺旋的对偶部。
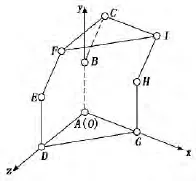
图2 3-RRR机构坐标系
通过式(1)可计算出并联机构的各螺旋为:
A点:$1=[0 0 1;0 0 0],
B点:$2=[0 1 0;y20x2],
C点:$3=[0 0 1;y3-x30],
D点:$4=[0 0 1;0 0 0],
E点:$5=[0 1 0;-z50 0],
F点:$6=[0 0 1;y6-x60],
G点:$7=[0 0 1;0 -x70],
H点:$8=[0 1 0;0 0x8],
I点:$9=[0 0 1;y9-x90].
从而可得出3-RRR并联机构的运动螺旋系为:

3 求解机构任意位形时的雅可比矩阵
运动雅可比矩阵也可称为一阶运动影响系数矩阵,通过以下步骤进行计算[2]。
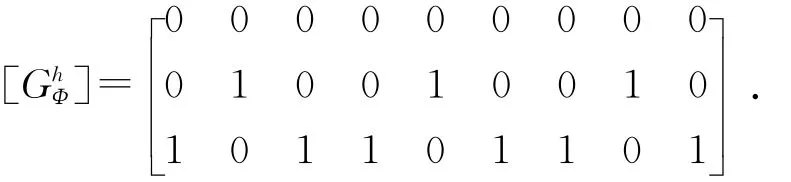
(1)根据公式(2)求出平台转动对分支运动副变量的一阶偏导影响系数矩阵[GhΦ]:

其中:Sn可直接引用前面的结果。该机构为全转动副,由此可得:
(2)取FI的中点为P点,如图3所示。设Rn为机构上各铰点的坐标,根据公式(3)求出平台移动对分支运动副变量的一阶偏导影响系数矩阵[Gpφ]:

其中:j为运动副的数目。设图3中AD=AG=CI=FC=a,AC=FD=IG=b,CB,FE,IH与y轴夹角为θ。可得P点的坐标为(0.5a,b,0.5a),R1即A点的坐标为(0,0,0),R2即B点的坐标为(0,0.5b,0),R3即C点的坐标为(0,b,-0.5bsinθ),R4即D点的坐标为(0,0,a),R5即E点的坐标为(0,0.5b,a),R6即F点的坐标为(0,b,a-0.5bsinθ),R7即G点的坐标为(a,0,0),R8即H点的坐标为(a,0.5b,0),R9即I点的坐标为(a,b,-0.5bsinθ)。据此可得:
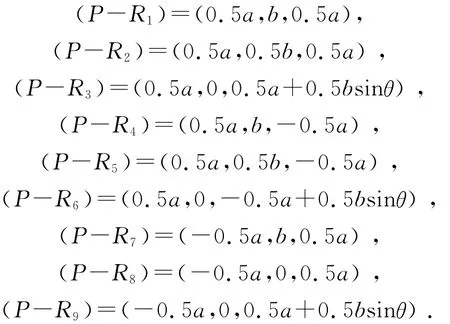

图3 P点位置
该机构为全转动副,由此可得:

(3)根据式(4)求出该机构的一阶运动影响系数矩阵[],即运动雅可比矩阵J(q):

4 3-RRR并联机构的灵巧度分析
机构的灵巧度可通过雅可比矩阵的条件数、最小奇异值、条件数的倒数、可操作数等来衡量,本文利用可操作数和条件数对机构进行灵巧度分析。
4.1 利用可操作数w来衡量
可操作数w由下式计算:

其中:σ1,σ2,…,σm为J(q)的奇异值。
若w=0,则机构奇异;反之若w≠0,则机构不奇异。很明显根据式(4)求得J(q)=0,再由式(5)可计算得出w=0,故而该并联机构此时处于奇异位形[3]。
4.2 利用雅可比矩阵的条件数K(J)来衡量
首先要求出雅可比矩阵的奇异值,考虑计算的复杂程度,本文通过求雅可比矩阵的特征值来求解奇异值。经过变换整理可得:

由式(6)可得雅可比矩阵的奇异值σi=,其中λi为雅可比矩阵的特征值,i=1,2,…,6,0≤σm≤…≤σ2≤σ1。由于σm=0,从而可得出|J(q)|=σ1σ1…σm=0,K(J)=
条件数的范围是:1~+∞,当条件数为1时,求逆精度最高;当条件数趋于无穷时,该机构的雅可比矩阵奇异,所以该机构此时处于奇异位形。
5 结论
本文利用SolidWorks软件建立了3-RRR并联机构的三维模型,利用D-H法建立了该并联机构的空间坐标系,并由此利用螺旋理论计算出该并联机构的各运动螺旋,建立运动螺旋系,据此求出该并联机构的运动雅可比矩阵,并对该并联机构的一阶运动影响系数进行分析,求出可操作数和条件数,对机构的灵巧度进行分析。得出分析结果:该机构处于任意位形时,它的雅可比矩阵都必定奇异。同时发现该机构运动时只可以绕y轴和z轴转动,不能绕x轴转动,缺乏一个x方向的自由度。
[1]黄真,赵永生,赵铁石.高等空间机构学[M].北京:机械工业出版社,2006.
[2]熊有伦.机器人学[M].北京:机械工业出版社,1993.
[3]杨玉维,赵新华.3-RRRT并联机器人工作空间与灵巧度分析[J].机械设计,2005(2):11-13.
