机载小型化星敏感器遮光罩设计*
2014-12-31胡晓东刘元正王继良
胡晓东,胡 强,雷 兴,魏 青,刘元正,王继良
(中国航空工业集团公司西安飞行自动控制研究所,陕西西安 710065)
0 引言
星敏感器是机载天文导航系统中的重要部件,它是通过实时拍摄星图,再进行星图识别和姿态解算实现对载体的导航。星敏感器探测的目标信号通常十分微弱,白天工作时,背景光的辐射强度远远大于信号本身的强度,给准确探测目标带来很大困难。由于强杂光的影响,目标很容易受到干扰,甚至目标信号被背景光淹没,从而导致目标失真[1],因此,星敏感器消杂光系统的设计就变得至关重要。消杂光技术是星敏感器的核心技术之一,杂散光消除效果的好坏将直接决定星敏感器系统能否正常工作[2]。
本文根据星敏感器成像系统自身的特性与消杂光设计基本原则,对机载小型化星敏感器的遮光罩进行了设计,利用Matlab计算出遮光罩的尺寸,确定挡光环的位置,结合CAD作图软件对基于该消杂光系统的星敏感器镜头进行了建模,并使用杂光分析软件TracePro对遮光罩的消杂光效果进行了仿真和分析,给出了点源透过率曲线。结果表明:当离轴角度大于太阳规避角时,点源透射比值达到10-10量级,满足实际工程需要。
1 遮光罩设计实例
以某机载星敏感器系统的R-C型折反式光学系统为例,该结构示意图如图1所示,主、次镜曲率半径分别为R1=-188.346 mm,R2=-99.8 mm。
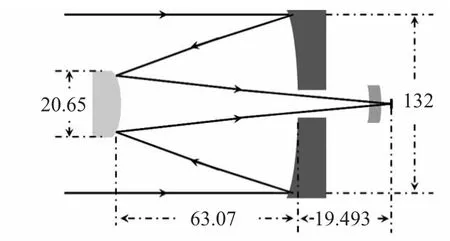
图1 R-C系统结构示意图Fig 1 Structure diagram of R-C system
根据设计经验,一般要求系统的在规避角的点源透射比(point source transmittance,PST)达到10-10量级[3]才能满足工程需要。对于传统R-C系统消杂光机构而言,要达到上述消杂光水平,通常需要在镜头主体前加一外遮光罩,通过在外遮光罩上合理设置挡光环,遮挡太阳规避角30°以上的杂散光线直接入射,使得杂散光在前遮光罩上的一次反射光不会进入到光学系统内[4]。但是考虑到机载环境的特殊性,要求系统的长度不能太长,因此,本文将主、次镜间镜筒的前端部分作为外遮光罩使用,按照外遮光罩的设计方法进行设计,以压缩整个消杂光系统的长度。
在仪器视场角θ、入瞳直径D0、杂散光源(例如太阳)入射角α等已知的条件下,通过简单计算可以得到镜筒前端遮光罩的长度L=255 mm与口径D'0=160 mm[5],而挡光环的位置通常情况下需要通过作图法得到。具体地设计步骤如图2所示,首先连接E与D1,直线ED1与AB的交点X1即为第一个挡光环顶点;再连接F与X1交直线CD1于点D2;然后连接E与D2,直线ED2与AB的交点X2即为第二个挡光环顶点。以此类推,连接F与Xn-1交直线CD1于点Dn,再连接E与Dn,直线EDn与AB的交点Xn即为第n个挡光环顶点。
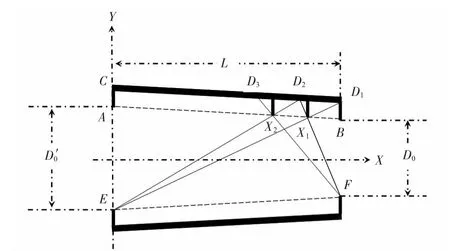
图2 镜筒前端遮光罩挡光环设计示意图Fig 2 Design diagram of the front baffle vanes of lens barrel
本文是在作图法的基础上,通过Matlab程序计算出各个挡光环的精确坐标,从而确定其位置,免去了作图法繁琐的步骤,在减小误差的同时也提高了设计效率。首先以光轴为X轴、遮光罩外端口为Y轴建立直角坐标系,由此可得A,B,C,D1,E,F的坐标,根据图3 所示的流程,在计算机上利用Matlab编程即可得到一系列挡光环顶点的坐标(如表1所示)。此外为了减小挡光环的端面散射,在设计挡光环边缘时存在一定的倾角,一般取30°,其上端有个倒角,半径为 0.2 mm,挡光环厚度为 1 mm[4]。
对于遮光系统来说,只使用外遮光罩来遮挡杂光显然是不够的,事实上,系统的自身内辐射也会影响性能,在杂光设计分析过程中挡光环和内遮光罩的设计也是很有必要的。
根据R-C系统遮光罩设计的基本原则和具体要求,作出主、次镜遮光罩示意图如图4所示[6]。

表1 前遮光罩挡光环顶点坐标Tab 1 Vertex coordinates of the front baffle vanes
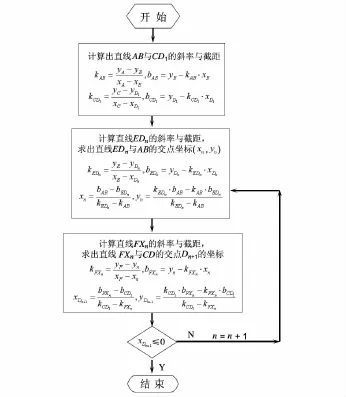
图3 镜筒前端遮光罩挡光环计算程序流程图Fig 3 Flow chart of calculation program of the front baffle vanes of lens barrel
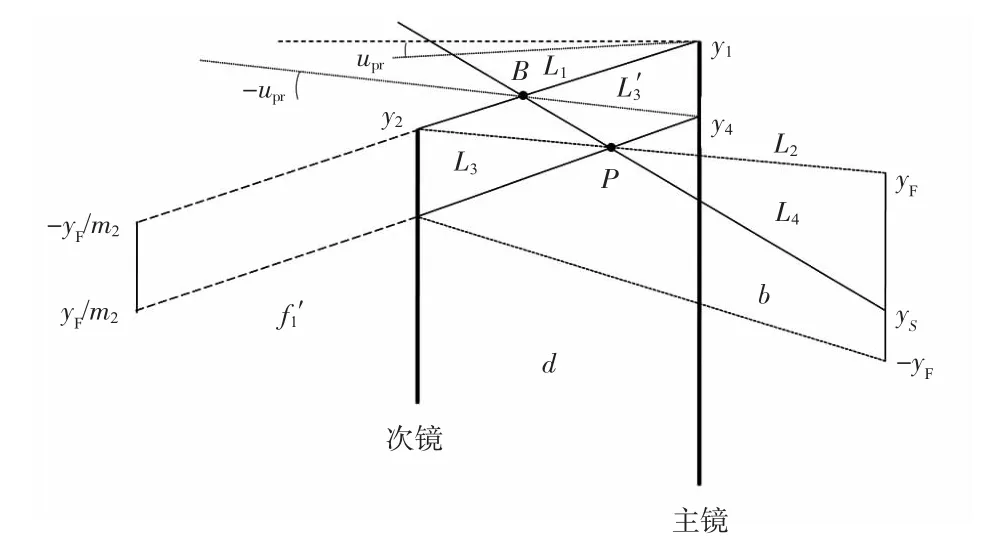
图4 主、次镜遮光罩设计示意图Fig 4 Design diagram of baffle of main and secondary lens
为了使光线均匀照射到像面上,视场内的所有光线必须要通过主、次镜遮光罩之间的缺口。同时2条视场边缘光线L1和L2也必须能够到达像面上。L1和L2决定了主、次镜遮光罩的最小尺寸。图4中的光线L4表示一束杂光,它与2条视场边缘光线L1和L2的交点分别就是主、次镜遮光罩的端点位置。从图4中不难看出,对于焦平面上|y|<|yS|的任何位置都没有杂光可以直接到达。而对于最小渐晕条件,L'3是一条恰好可以通过次镜遮光罩的达到主镜上面的边缘光线。这条光线经主镜反射后沿L3到达次镜,而L2,L3和L43条光线必定相较于一点P(zP,yP),该点就是主镜遮光罩的顶点坐标。
下面分别对上述5条光线的直线方程进行求解。通过分析可以发现,实际上需要确定的独立变量只有4个分别是主、次镜遮光罩顶点坐标(zB,yB)和(zP,yP)。虽然视场边缘光线打到主镜上的坐标y4也是未知的,但是,它完全可以通过次镜遮光罩的位置来求得。
如果设光线Li的方程为

则由图4可得
为了简化公式,用b1和a2来代替式(2)和式(3)中的斜率和截距。首先对L3和L4的交点B(zB,yB)进行求解
将式(7)和式(8)代入式(4)中可得

接下来对于L2和L3的交点P(zP,yP)进行求解
在式(9)中对于y4的描述使用了zP和yP两个未知的参数,而式(10)和式(11)则给出了用y4描述的zP和yP的表达式。将式(10)和式(11)代入式(9)中可以得到一个关于y4的一元二次方程

其中


根据一元二次方程的求根公式对式(12)进行求解。然后代入式(10)和式(11)中得到zP和yP。最后代入到式(7)和式(8)中得到次镜遮光罩的顶点坐标(zB,yB)。
如图5所示,在本文中为了减小系统遮拦,次镜遮光罩采用了百叶窗形式,同时在主镜遮光罩内添加了一系列挡光环,进一步提升系统的消杂光能力[7]。根据已经求得的B点及P点的坐标,以及光线的直线方程,可以得到各个挡光环顶点的坐标,具体数值见表2和表3。
图5 主镜挡光环、次镜百叶窗设计示意图Fig 5 Diagram of the main lens baffle vanes and secondary lens baffle louver
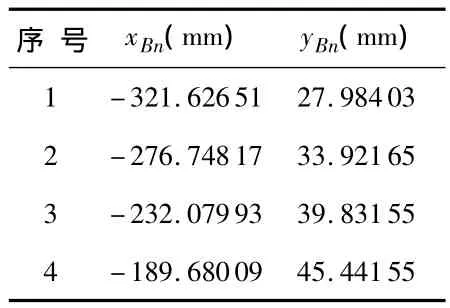
表2 次镜百叶窗顶点坐标Tab 2 Vertex coordinates of the secondary lens baffle louver
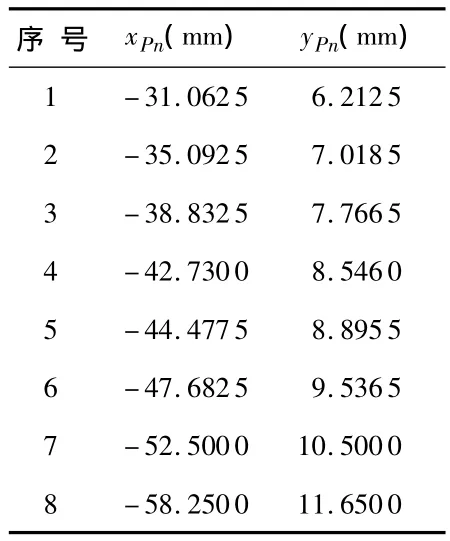
表3 主镜遮光罩挡光环顶点坐标Tab 3 Vertex coordinates of the main lens baffle vanes
R-C系统中,主、次镜间的镜筒阻止外界杂散光直接入射到像面,但镜筒表面本身具有一定反射率,镜筒内壁的部分表面实际上充当关键表面或光源直接照射表面甚至同时充当这两类表面[8]。因此,当有杂散光辐射到镜筒内壁某些表面上时,可能反射到反射镜面,多次反射后到达像面形成干扰。这些经由镜筒内壁和光学元件表面的多次反射会严重降低图像的对比度,从而影响成像效果。为了尽量减小此类影响,一般要在镜筒内壁涂覆黑色的消光漆,同时在添加螺纹及挡光环。为此,本文在主、次镜间镜筒内壁设计了一定数量的挡光环。
如图6所示,设镜筒内壁挡光环等高,并记作H,虚线为不加挡光环时遮光筒的位置。外界杂散光由次镜边缘点h入射,在遮光筒内壁上选择靠近主镜的一点u与点h和点p连接作为镜筒接收杂散光的最小角度路径。在直线uh和直线up与虚线的交点处设置挡光环。依此类推,直到接近遮光筒边缘为止,便可确定全部挡光环的位置。

图6 遮光筒内壁挡光环的设计示意图Fig 6 Design diagram of the inner wall vanes of baffle
2 遮光罩仿真结果
利用上述设计方法,本文针对太阳规避角30°之外系统消光比小于4.4×10-9的设计指标,对光学系统的消杂光结构进行了详细设计。如图7所示,将利用Matlab语言编程得到的挡光环各个顶点坐标使用UG绘制模型。

图7 星敏感器系统消杂光设计图Fig 7 Design of stray light elimination of star sensor system
使用光学软件TracePro对整个系统进行的消杂光效果进行仿真。设置各个表面的散射特性,其中光学透镜表面都设置为镜面,其它表面都设置为喷砂染黑表面,参数均采用系统默认参数。模拟中设置的光线数为6 003 560条,计算出的消光比曲线如图8所示,经过多次实验证明,得出的结果是稳定的。由图可知随着离轴角的增大,系统的PST值一直在下降,当离轴角为30°时,其 PST值为5.536×10-10,小于系统要求的PST指标值4.4×10-9,设计的遮光罩能满足抑制杂散光的性能要求。
3 结论
本文主要就机载小型化星敏感器消杂光技术的相关问题进行了研究。在作图法的基础上,利用Matlab语言编程实现了对于R-C系统遮光罩的程序化设计。针对机载环境的特殊性要求,采取了将主、次镜间镜筒的前端部分作为外遮光罩的设计方法,压缩了整个消杂光系统的长度。同时,次镜遮光罩采用了百叶窗形式,减小了系统遮拦。通过在主镜遮光罩内添加一系列挡光环的方法,进一步提升了系统的消杂光能力。将得到的挡光环各个顶点坐标使用UG绘制模型,并利用光学设计分析软件TracePro,采用蒙特—卡罗法对600万条光线在不同入射角度情况下的点源透射比进行了分析,在30°太阳规避角时的 PST值达到了5.536×10-10,小于系统要求的性能指标。
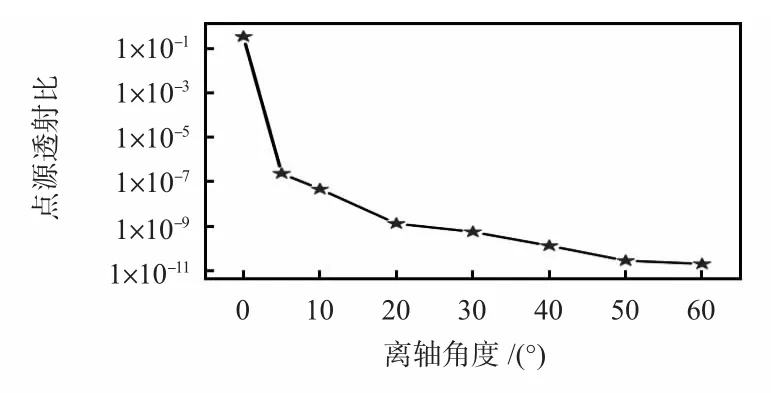
图8 系统PST曲线Fig 8 PST curve of system
[1]李 婷,杨建峰,阮 萍,等.R-C系统的遮光罩设计与仿真[J].光子学报,2008,37(2):332-336.
[2]廖志波,伏瑞敏,宗肖颖.星敏感器遮光罩的优化设计[J].中国激光,2010,37(4):987-990.
[3]李 芸,相里斌,李立波.一种新型空间相机遮光罩的设计与仿真[J].光电工程,2010,37(7):41-44.
[4]《光学仪器设计手册》编辑组.光学仪器设计手册(下)[M].北京:国防工业出版社,1971:618-621.
[5]闫佩佩,樊学武.R-C光学系统设计及杂散光分析[J].红外技术,2011,33(4):214-218.
[6]高郭鹏,熊望娥,甘玉泉,等.R-C系统外遮光罩挡光环的程序化设计及锥状内遮光罩的改进[J].应用光学,2009,30(4):575-579.
[7]钟 兴,张 雷,金 光.反射光学系统杂散光的消除[J].红外与激光工程,2008,37(2):316-318.
