用超级电容储能的电动车再生制动力控制
2014-12-23曾令厚盘朝奉李仲兴
陈 燎,曾令厚,盘朝奉,李仲兴
(江苏大学汽车与交通工程学院,江苏镇江212013)
电动车对解决城市交通拥堵、能源危机和环境污染问题意义重大.目前,电动车存在的问题是一次充电续驶里程短和充电时间长,因此,进行车辆制动能量回收既有利于节能环保,又能够在一定程度上延长蓄电池的续驶里程[1].制动时车辆运动状态剧烈变化,再生制动系统发电功率也随着急剧改变,为了达到车辆制动性能要求,同时尽可能多地回收车辆动能,对电动车再生制动系统的组成、工作能力和控制方法都提出了较高的要求[2].
电动车再生制动系统首先应该按照驾驶员的制动操作产生与之期望的制动力,因为电动机转矩与电流成正比,所以,电制动系统的基本功能就是要控制电动机的电流.通常可采用测量电动机相电流或电动机驱动器直流侧母线电流的直接反馈控制方式,这样做使控制策略制定最简单,但是有硬件系统固定开销,提高装置成本.
电动机转速一般是已经被电动车驱动系统检测的参数,再生制动系统储能装置的电压反映了其电能的储存量,常常需要检测,此外,电压测量相对电流测量要更简单.笔者结合超级电容储能装置应用的特点,利用电动机转速和超级电容端电压估计电动机电流.对电流进行控制的方法在工程上有显著实用价值.
1 系统结构
再生制动系统的储能装置采用超级电容比采用蓄电池、飞轮等在比功率、电流、效率等方面有显著优势,但是,由于超级电容端电压随充放电程度而改变,这对系统控制提出了特殊要求[3-5].
用蓄电池和超级电容组成的电动车驱动与再生制动系统结构如图1所示.

图1 电动车系统结构
通常情况下,蓄电池经驱动器给电动机供电驱动车轮,制动时电动机被车轮带动发电,交流电经驱动器整流后成为直流电,经DC/DC变换后电能储存在超级电容中.当超级电容中储存了足够多的能量后,可以经由DC/DC变换器用于电动机驱动车辆行驶或用于其他用电装置.控制器根据驾驶员意图和车辆行驶状态决定系统工作于驱动或再生制动状态,并且通过控制DC/DC的运行使再生制动时车辆得到所要求的制动力.
DC/DC变换器是系统能量传输通道上的关键设备,图2是电动车采用的一种全桥DC/DC电路拓扑结构,能实现能量的双向升压和降压传输[6-8].功率器件Q1-Q5的开关状态决定系统的工作状态:① Q1-Q4截止,Q5常开,由蓄电池供电驱动电动机;② Q2,Q3,Q5截止,Q1常开,Q4由PWM信号控制,再生制动时向超级电容升压充电;③Q2-Q5截止,Q1由PWM信号控制,再生制动时向超级电容降压充电;④ Q1,Q4,Q5截止,Q3常开,Q2由PWM信号控制,超级电容升压放电;⑤ Q1,Q2,Q4,Q5 截止,Q3 由 PWM 信号控制,超级电容降压放电.
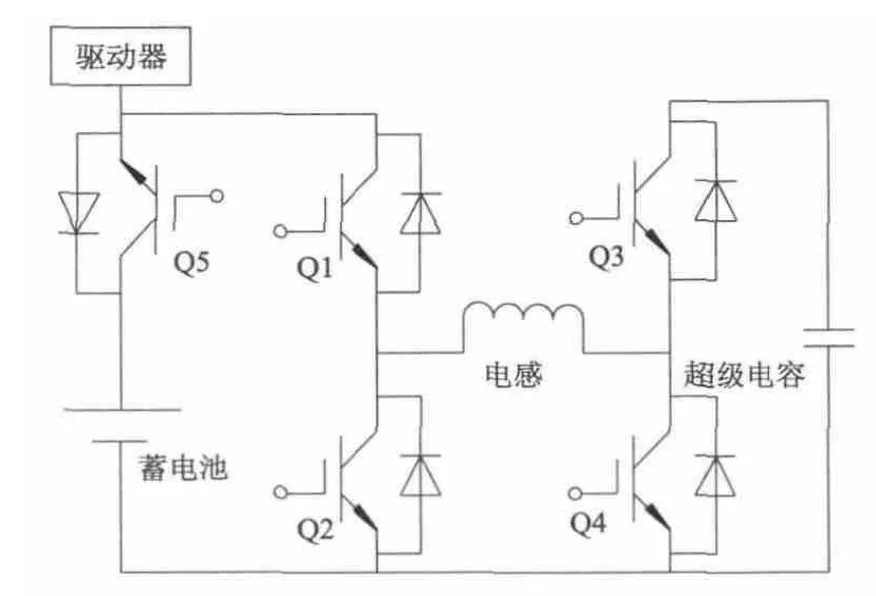
图2 再生制动系统主电路
2 系统模型与仿真
电动机的发电电压正比于其转速,制动时发电电压随车速降低而降低,而超级电容的端电压却随制动过程中电能的不断充入而上升.所以,再生制动系统经常处于发电电压低于超级电容端电压的状态,系统向超级电容升压充电是其最基本也是最重要的工况.这时,对应Q4的导通与截止,BOOST电路在图3a,b所示的2个拓扑结构中切换.
分别写出描述2个电路的微分方程,图3a中Q4导通期间(PWM 高电平期)是一阶RL电路,可得

式中:i为电感电流,即电动机电流,A;L为电感量,H;R0为导通期间电路总电阻,Ω;U为电动机发电电压(经驱动器整流后的直流电压),V.

图3 电动机对超级电容升压充电等效果电路
图3b中Q4截止期间(PWM低电平期)是二阶RLC电路,可得

式中:C为超级电容量,F;Vc为理想超级电容端电压(不含内阻压降),V;R1为截止期间电路总电阻,等于超级电容内阻(ESR)加R0,Ω.
再生制动能量回收电路一般满足过阻尼条件,根据式(1),(2)可以得到对电路进行仿真的迭代计算式.设T为PWM信号周期,计算第n+1个周期时,占空比为D.Q4导通期电感电流为

式中:Vn为电动机发电电压当前值,V;ton为PWM信号高电平时长,ton=DT,s.
Q4截止期的电感电流为

式中:λ1,λ2分别为式(2)特征方程的特征根;t1n为PWM信号低电平时长,t1n=(1-D)T,s;K1,K2为系数.

式中Vcn为当前理想超级电容端电压,V.

当前电动机发电电压Vn与转速Nn成正比,即

式中Ev为电动机电动势常数.
当前电动机转矩Mn与电流in成正比,即

式中Em为电动机转矩常数.
电动机角减速度为

式中:J为换算到电动机轴的车辆转动惯量,kg·m2;Mfn为换算到电动机轴的滚动阻力矩,N·m.

式中a1,a2,a3为试验获得的系数.
电动机转速为

经式(3)-(11)迭代计算,对车辆的再生制动过程进行仿真,所用到的系统参数如下:转动惯量J为6.8 kg·m2;电感量L为 0.000 5 H;超级电容的电容量为5 F;导通期间电路总电阻R0为0.4 Ω;截止期间电路总电阻R1为1.1 Ω;PWM信号周期T为0.000 035 s;电动机电动势常数Ev为0.105 V·min·r-1;电动机转矩常数Em为0.95 N·m·A-1;系数a1,a2,a3分别为 -8.130 ×10-6,0.016,6.320;系统采样周期Ts为0.01 s;电动机的制动初始转速N0为350 r·min-1;超级电容初始端电压Vc0为30 V.控制策略为转速的线性函数:

电动机电流与超级电容端电压的仿真曲线如图4所示,超级电容端电压由30.0 V上升到35.2 V,储能增加850 J,系统初始动能约4 500 J,能量回收率约为18.9%.可以看出:虽然PWM控制信号占空比随转速降低而同步增加,电动机电流并未如期望那样保持一段时期的平稳,而是急剧减小.说明再生制动过程中DC/DC变换器工作在非稳定状态,不能根据稳定工况假设得到的结论来进行相关操作.
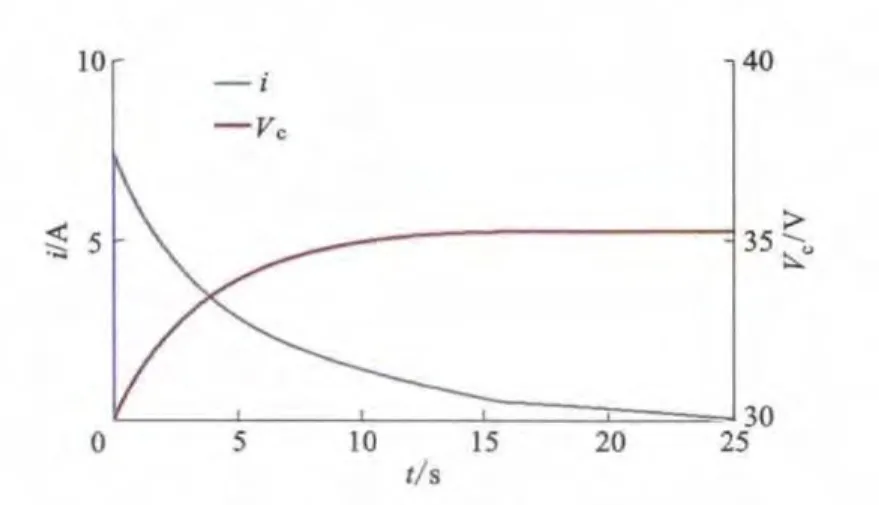
图4 再生制动过程仿真
3 基于估计电流的恒电流控制
因为端电压直接指明了电容储存电能的程度,所以,在用超级电容作为储能装置的再生制动系统中,超级电容的端电压是必须测量的.只是当电容存在充放电电流时,测量的电容端电压包含电容内阻的压降,而不是模型中的理想电容器端电压Vc.
设U'和n'是超级电容端电压与电动机转速的测量值,i'是通过U'和n'估计的电动机平均电流.由式(7)可得电动机发电电压估计值为

PWM信号高电平期电动机电流为

PWM信号低电平期电动机电流为

再生制动系统DC/DC变换器以及电动机的时间常数通常都远远大于PWM控制信号的周期T,变换器工作于电流连续模式(CCM).因此,1个PWM信号周期T内电动机的平均电流i'可以用高电平期电流i0'和低电平期电流i1'的某种平均值来代替.根据开关变换器的状态空间平均法建模思想,用控制信号占空比D作为平均权重来计算i'是合理的[9-10],即

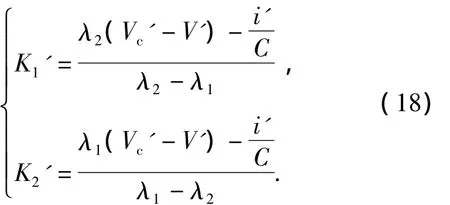
理想超级电容端电压为

式(15)中系数K1'和K2'计算式为
式(13)-(18)构成对电动机电流均值进行估计的控制器计算模型,根据电流均值可以采用电流直接反馈控制的方法控制电动机在再生制动过程中的电流.
同样针对系统参数确定值,电动机电流目标值I分别为10,15 A,采用PI控制策略(式(19))进行电动机恒电流再生制动过程仿真.因为,制动时电动机转速是单调递减的,PWM信号占空比D理论上应该单调增加,所以,采用增量式PI算法.

式中:KP和KI分别为比例系数和积分系数,取KP=0.001 ~0.010,KI=0.1 ~1.0.
KP=0.005,KI=0.5,目标电流分别为 10,15 A时,得到的电动机电流与超级电容端电压仿真曲线分别如图5a,b所示,在2种目标电流要求下,电流都被控制在距离目标值很近并且比较稳定,超级电容端电压上升幅度基本一致,回收能量基本相同,约1 550 J,回收率大于30%.2种情况的差异为目标值的电流维持时间的长短,电流曲线上的突变点发生在占空比到达D=1的时刻,此刻之后电动机发电电压太低,已经不能恒电流回收能量.

图5 恒电流再生制动过程仿真曲线
4 恒电流再生制动试验
为了验证系统结构和控制方案是否切实可行,搭建了制动惯性试验台,试验台系统参数与上文相同.在初始条件下进行再生制动试验,控制算法为式(19).恒电流再生制动试验得到的转速与占空比曲线如图6所示,占空比不仅仅由转速决定.
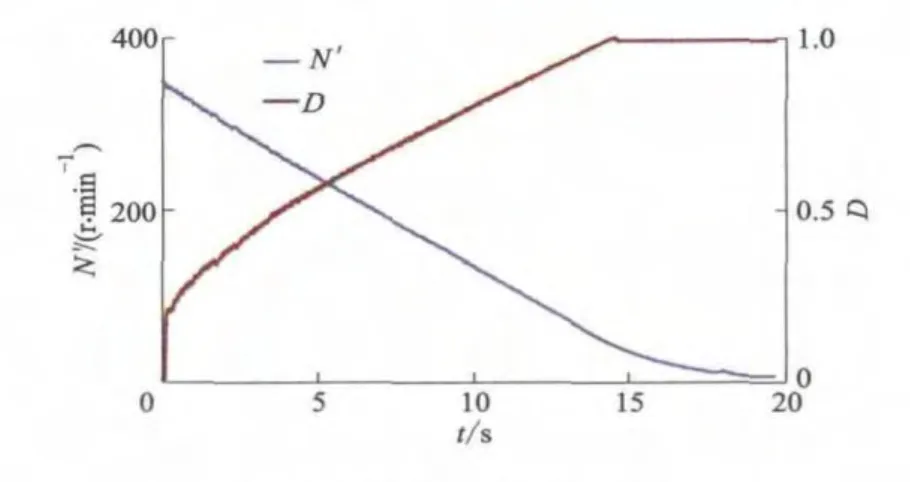
图6 转速与占空比曲线
恒电流再生制动试验得到的电流曲线如图7所示,图7a为直流母线电流曲线,图7b为按式(16)计算得到的直流平均电流曲线,实际母线电流被有效控制在10 A附近,而计算的平均电流表现更平稳,二者有一定差异,反映了模型与实际系统存在不一致,但这样的误差应该在工程应用所能接受的范围内.

图7 恒电流再生制动试验的电流曲线
恒电流再生制动的超级电容端电压曲线如图8所示,图8a为实测曲线,包括电容ESR造成的压降.图8b为按式(17)计算的理想曲线.制动前后超级电容端电压从29.2 V上升到39.5 V,回收能量约为1 750 J,高于仿真的1 550 J,除了模型差异外,主要原因可能是超级电容标称容量不是很准确.

图8 恒电流再生制动超级电容端电压曲线
5 结论
1)在采用超级电容储能的电动车再生制动系统中可以不直接测量电动机电流,只测量电动机转速和电容电压也能较好地达到控制电动机电流的目的.这样简化了系统结构,降低装置成本,有利于再生制动系统的推广.
2)对工作于CCM模式的DC/DC变换器,采用基于换路原理建立的数学模型能很好地模拟数字控制方式下变换器的行为.
3)在稳定和小信号前提下得到的部分变换器特性(例如,输入电压/输出电压)对工作于再生制动过程中的DC/DC变换器不适宜.
4)通过电动机转速和超级电容电压应用状态空间平均法估计电动机电流,然后使用PI控制策略就能对再生制动系统进行恒电流操作.该方法具有算法不复杂、控制精度高、系统状态稳定的特点,适合工程应用.
References)
[1]黄万友,程 勇,曹 红,等.纯电动汽车动力驱动系统参数匹配试验[J].江苏大学学报:自然科学版,2013,34(2):131-137.Huang Wanyou,Cheng Yong,Cao Hong,et al.Matching experiment of EV power-train parameters[J].Journal of Jiangsu University:Natural Science Edition,2013,34(2):131-137.(in Chinese)
[2]何 仁,俞剑波,王润才.电动汽车混合制动系统控制策略的改进[J].江苏大学学报:自然科学版,2013,34(2):125-130.He Ren,Yu Jianbo,Wang Runcai.Improvement of control strategy in hybrid brake system of electric vehicle[J].Journal of Jiangsu University:Natural Science Edition,2013,34(2):125-130.(in Chinese)
[3]Lu Shuai,Corzine K A,Ferdowsi M.A new battery/ultra-capacitor energy storage system design and its motor drive integration for hybrid electric vehicles[J].IEEE Transactions on Vehicular Technology,2007,56(4):1516-1523.
[4]Yoo H,Sul S K,Park Y,et al.System integration and power-flow management for a series hybrid electric vehicle using supercapacitors and batteries[J].IEEE Transactions on Industry Applications,2008,44(1):108-114.
[5]邓隆阳,黄海燕,卢兰光,等.超级电容性能试验与建模研究[J].车用发动机,2010(1):28-32.Deng Longyang,Huang Haiyan,Lu Languang,et al.The performance experiment and modeling of ultracapacitor[J].Vehicle Engine,2010(1):28-32.(in Chinese)
[6]Camara M B,Gualous H,Gustin F,et al.DC/DC converter design for supercapacitor and battery power management in hybrid vehicle applications:polynomial control strategy[J].IEEE Transactions on Industrial Electronics,2010,57(2):587-597.
[7]成 立,奚家健,李 宁,等.一种半/全桥PWM切换策略电动车能量回馈法[J].江苏大学学报:自然科学版,2013,34(3):304-308.Cheng Li,Xi Jiajian,Li Ning,et al.Half/full bridge of PWM switching control method for energy regeneration of electric vehicles[J].Journal of Jiangsu University:Natural Science Edition,2013,34(3):304-308.(in Chinese)
[8]Grbovic P J,Delarue P,Moigne P L,et al,A bidirectional three-level DC-DC converter for the ultracapacitor applications[J].IEEE Transations on Industrial Electronics,2010,57(10):3415-3430.
[9]Cao Jian,Emadi A.A new battery/ultracapacitor hybrid energy storage system for electric,hybrid,and plug-in hybrid electric vehicles[J].IEEE Transactions on Power Electronics,2012,27(1):122-132.
[10]陈亚爱.开关变换器的实用仿真与测试技术[M].北京:机械工业出版社,2010.
