VT2100视频检测设备在交通调查中的精度分析
2014-12-22吴群慧
吴群慧,吴 中
(河海大学土木与交通学院,江苏 南京210098)
我国的公路交通量调查,起步于20世纪70年代末,调查方式经历了早期纯手工记录观测,到人工使用机械观测方式,90年代开始使用地埋线圈检测车流量辅以人工抽样获取车型系数的半自动化观测发方式,2000年后相继从国外引入了视频、超声波、微波等非接触式的全自动车辆检测技术。近年来随着各类车辆检测技术的逐步推广应用,交调工作的科技含量得到了大幅提升,加快推动了交通智能化和信息化的发展进程。
目前被国家交通运输部推荐使用的交调检测设备约有线圈、压电、微波、视频、激光、地磁等6大类,组合型有线圈压电激光、线圈压电、超声波微波、双地感线圈、微波雷达、视频微波、超声波微波、地感线圈、视频雷达及压电磁阻等10余种。各地普遍采用的主要有线圈、压电、微波、视频、超声波5大类型。因受到道路和环境的影响,江苏省公路部门最初选择了视频设备作为试点,本文将通过对首个安装于宁马高速公路上的视频交调检测设备,通过连续多年的全天候道路交通流量数据检测情况,分析其实际使用过程中所能达到的车流量精度、分车型精度以及设备稳定性,并尝试探讨影响视频设备性能发挥和稳定性的因素。
1 视频检测原理及技术性能
1.1 检测原理
视频车辆检测技术近年来发展迅速,是一种将视频图像处理和计算机图形识别技术结合起来的数据采集技术,代表了未来交通流信息自动化智能化的发展方向。它以高性能的摄像机作为传感器,在视频范围内设置虚拟线圈(检测区),车辆进入检测区时使背景灰度值发生变化,产生检测信号,通过图像识别软件的分析和处理,得到交通量、平均车速、占有率、排队长度等交通信息参数[1-5]。
视频设备的工作原理是在需要检测的路段车道上方架设摄像机,由CCD(chargecoupleddevice,电荷耦合器件)摄像机连续摄得2帧图像(数字图像),对其全部或部分区域进行比较,如有差异则说明检测区有运动物体,从而检测出通过的车辆。通过模式识别和人工智能算法,动态分析输出的视频(图像)信号,获得各种交通数据以及分车型数据。车型模型数据可根据各地实际情况动态实测创建。视频检测器的关键是快速的图像识别算法。
1.2 技术性能
视频检测具有如下优点:①安装简便,无须封闭道路,不破坏路面,检测地点可以移动,可一次检测较大区域。②视频检测系统适应性强,检测区域可以灵活定位,满足不断变化的数据采集要求,具备图像监视和交通数据采集双重功能,检测数据种类多,具备处理突发事件的性能优势。此外,视频设备还可以移到新的地方使用。③软件使用操作简单,价格适中,维护费用低,前期国内用户较多选择使用。缺点是夜晚和天气变化对检测精度有影响[6]。
2 数据比较及其分析
选取宁马高速公路南京段收费站所在的交调站点作为研究对象,对安装于收费站区的视频检测设备的检测数据进行比较分析。研究的基本思路是利用人工24小时观测数据和收费站收费额数据作为比对基础,计算视频设备检测数据相对误差,收费额数据用于进行车流量精度(波动)的比较。具体方法是:第1,选取2008—2009年收费额报表,与同期设备检测数据输出文件对比,通过月变曲线图得到运行期间总体精度情况,用P(precision)表示,计算式为(趋势相同月份数/运行期总月份数)×100%。第2,选取2009、2010年人工比重调查小时交通量(分车型)数据,与同期视频检测数据文件对比,得到流量精度和分车型精度[7],计算公式为(1-)×100%。第3,选取2006—2011年设备检测数据输出文件,通过各年份的数据正常检测天数,分析设备运行期间的稳定性和可靠性,用可靠度R(reliability)表示,计算式为(数据正常天数/运行期天数)×100%。
检测点所在断面为全封闭双向4车道,距离收费道口约70 m。收费区宽约32 m,安装有2个高杆灯,其上各有10盏灯,夜间照明情况较好。设备架设于道路中央分隔带立柱上方,距离地面10 m高处安装有一台摄像机,计算机主机及辅助设备置于路侧站房内,采用光纤进行数据传输。
2.1 总体精度
以2008—2009年收费站的车辆通行费月收入与设备检测的汽车月流量数据进行比较,由月度变化曲线图如图1、图2所示,2008年除1月和4月,2009年除3月,5月和6月,其余月份走势基本与通行费一致,根据公式计算得到总体精度P为79.2%。
岩浆活动过程中,与火山活动有关的中酸性浅成—超浅成岩浆——花岗闪长斑岩沿隆起与凹陷的过渡带的薄弱地带上侵。当岩浆快速到达地壳浅部,温度和压力迅速减低,大量水、挥发分和成矿元素析出,逐渐向岩浆顶部运移。由于灰岩地层的屏蔽作用,使气液大量聚集,当压力远远超过围岩的承压时[19],引发半塑性和已固结岩石发生破碎和震裂形成隐爆-震裂角砾岩,同时产生一系列的爆破的节理-裂隙系统,并沿着裂隙系统和层理等薄弱界面“灌入”。而后随着温度和压力的骤降,熔浆发生冷凝、结晶并析出大量含矿热液,进入爆破裂隙系统,形成蚀变和金属硫化物矿化。
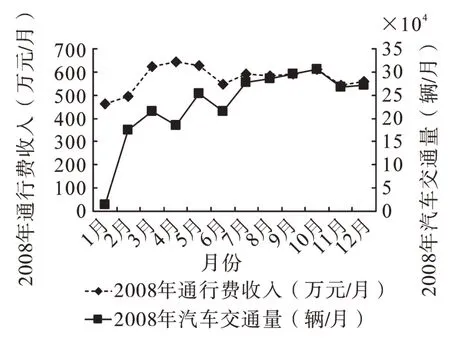
图1 月度变化曲线图(2008年)Fig.1 Graph of monthly changes
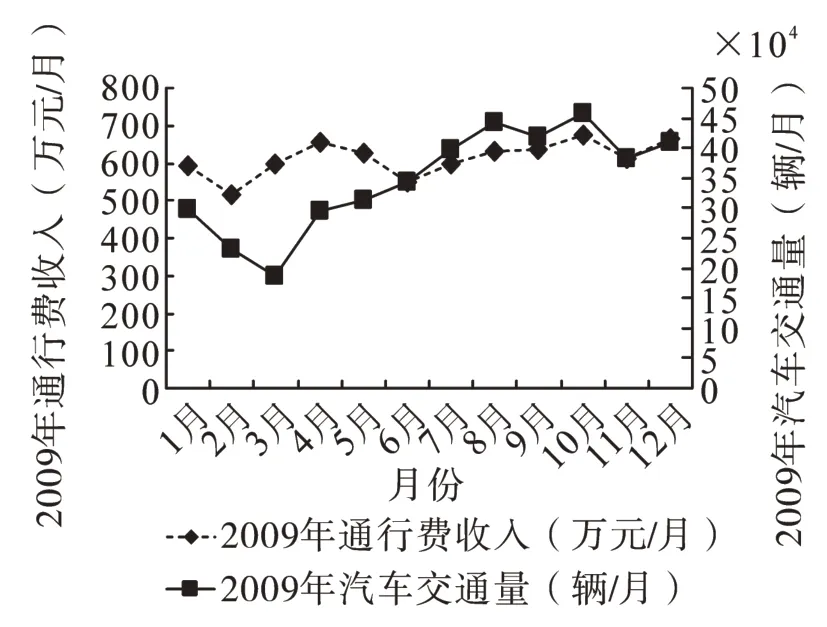
图2 月度变化曲线图(2009年)Fig.2 Graph of monthly changes
根据实际统计数据绘制得到曲线,月收入在400~700 万元之间。根据设备实际检测数据绘制得到曲线,月流量在100 000~500 000辆之间。
数据缺失是导致总体精度下降的原因,2008年1~4月份设备的月检测天数分别为4天,26天,29天和25天,图1显示了该段时间内两条曲线走势差异较大。2009年3月份设备检测天数亦是不齐全(23天),图2中两条曲线2~4月份间的走势差异非常大。随着运行时间的推移,设备的稳定性会发生改变,导致精度方面相比前一年度有所下降。
2.2 车流量数据精度
根据2009年10月15日上午9~11时、下午15~17时及晚间20~22时等3个高峰时间段共计6小时的人机数据比对结果(如表1所示),视频设备的车流量精度计算值为88.5%。各时段的流量精度分别为早高峰81%,午高峰97.5%及晚高峰85.6%。
根据2010年10月20日6时~21日6时计24小时的人机数据比对结果(如表2所示),视频设备的车流量精度为81.4%,白天12小时车流量精度为76.7%,夜间12小时车流量精度为98.1%。

表1 VT2100检测精度分析数据表(2009年)Tab.1 The data table of detection accuracy
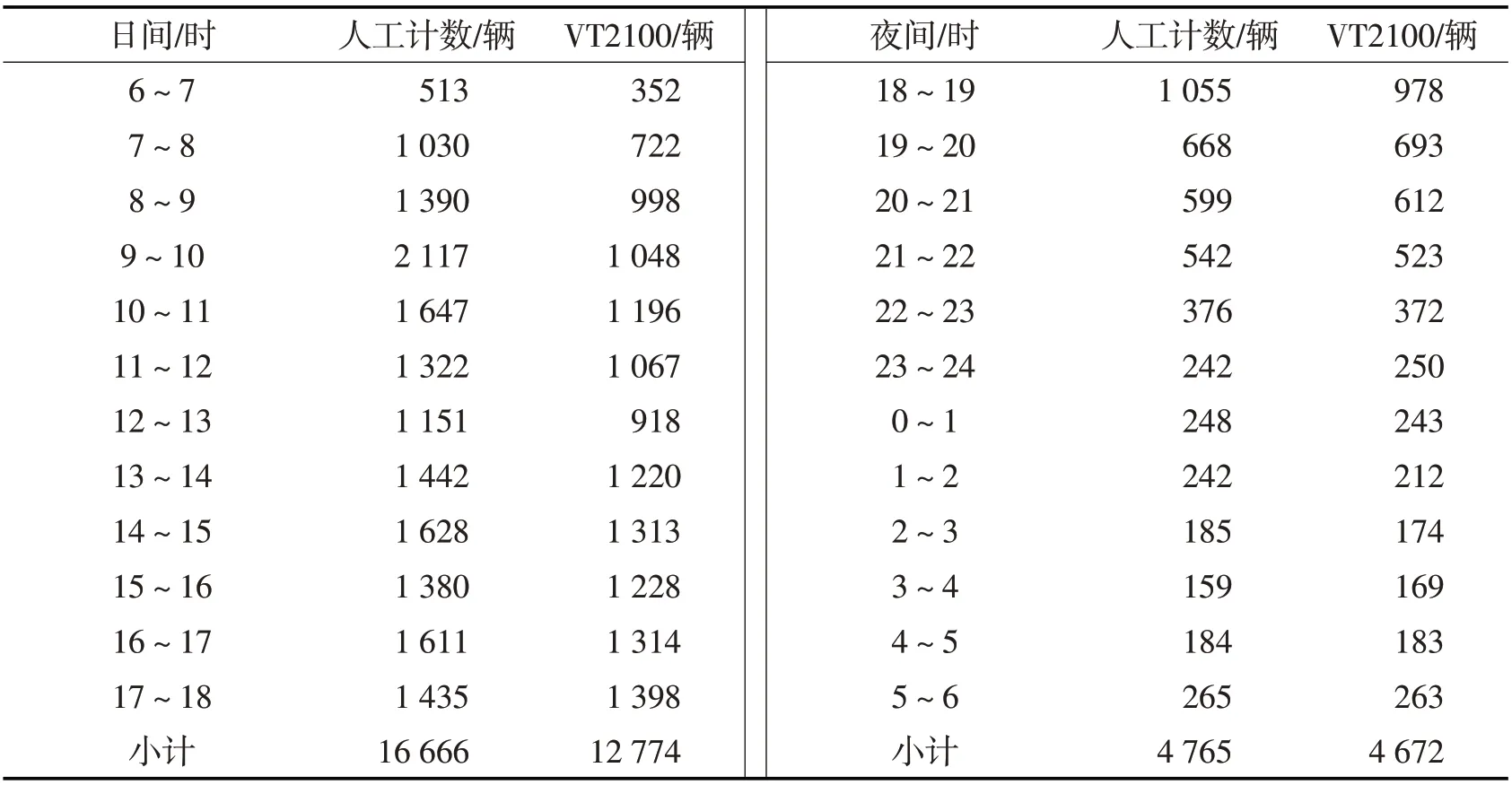
表2 VT2100检测精度分析数据表(2010)Tab.2 The data table of detection accuracy
2.3 车型数据精度
2.3.1 高峰时段分车型精度
根据2009年10月15日上午9~11时、下午15~17时及晚间20~22时等3个高峰时间段共计6小时的观测结果,人工对各类车型观测值分别为:大货383,中货491,小货189,大客325,小客3708,拖挂车453,单位均为辆;视频设备对各类车型检测值则分别为:大货242,中货196,小货752,大客261,小客3271,拖挂车187,单位均为辆。视频设备的分车型精度平均为62.6%。其中小客车的识别率较高,精度达到88.2%,其次为大客车,精度80.3%。设备对货车的识别率差异很大,大型货车识别率相对比较高,精度计算值为63.2%,其次为拖挂车,精度41.3%,中货精度39.9%,车型识别率最低的为小型货车,误差达2.9倍。如图3所示。
2.3.2 日夜分车型精度
根据2010年10月20日~21日连续24小时人工观测结果,白天12小时人工对各类车型观测值分别为:小货914,中货982,大货985,特大货565,拖挂车265,集装箱车81,小客11 383,大客1 486,单位均为辆;视频设备对各类车型观测值则分别为:小货2 677,中货315,大货845,特大货217,1拖挂车203,集装箱车49,小客7 688,大客780,单位均为辆。计算得到视频设备的日间分车型精度平均59.1%(不含小货)。其中大货车的识别率最高,检测精度85.8%,其次是拖挂,检测精度为76.6%,小客车67.5%,名列第3。设备对货车的识别率不及客车,各种货车的识别率存在较大差异,大货车的识别率相对比较高,其次为拖挂和集装箱(精度为60.5%),车型识别率最低的为小型货车,误差达1.93倍,如图4所示。
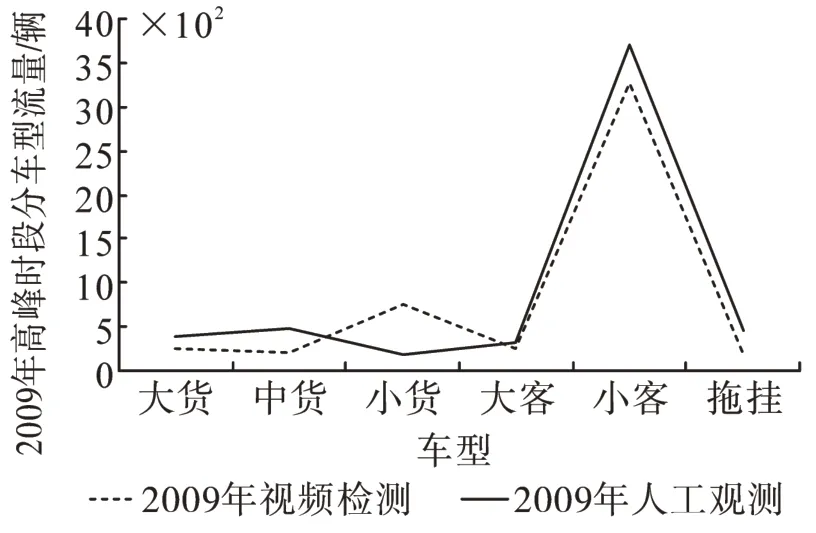
图3 高峰时段分车型精度(2009年)Fig.3 Vehicle identification accuracy of peak hours
夜间12 小时(20 时~次日8 时)人工对各类车型观测值分别为:小货183,中货412,大货567,特大货173,拖挂车581,集装箱车57,小客2 569,大客131,单位均为辆;视频设备对各类车型观测值则分别为:小货655,中货113,大货209,特大货40,拖挂车87,集装箱车14,小客3440,大客114,单位均为辆。根据夜间12个小时的人机数据比对结果,视频设备的分车型精度平均值为40.7%(不含小货),则低于日间精度。其中大客车的识别率最高,检测精度87.0%,其次为小客,检测精度为70.6%,大货36.9%,名列第3。设备对货车的识别率远不及客车,各种货车的识别率存在较大差异,大货车的识别率相对比较高,其次为中货和集装箱,精度分别为27.4%和24.6%,车型识别率最低的为小型货车,误差达2.58倍,如图5所示。
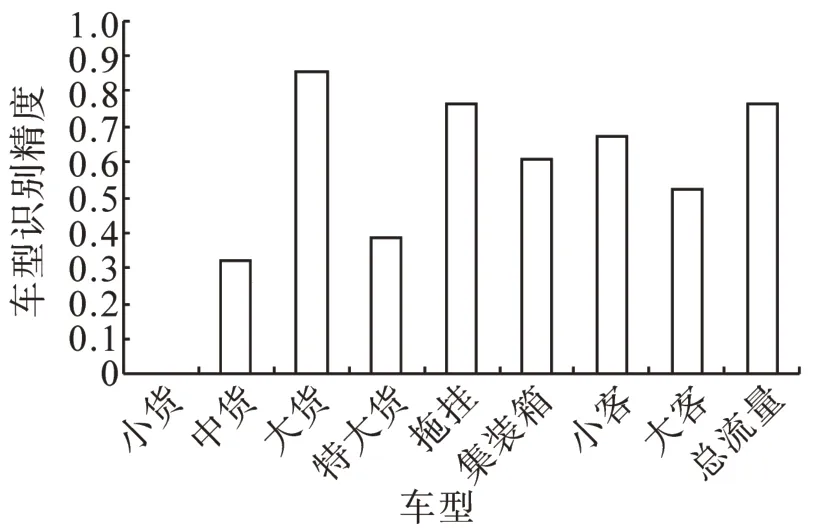
图4 白天分车型精度(2010年)Fig.4 Vehicle identification accuracy of daytime
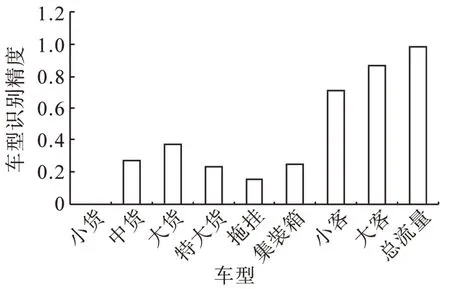
图5 夜间分车型精度(2010年)Fig.5 Vehicle identification accuracy of nighttime
全天24 小时的人机数据比对结果,视频设备的总流量检测精度为81.4%,分车型检测精度平均为49.7%(不含小货)。其中,小客车的识别率最高,检测精度79.2%,其次是大货,检测精度为67.9%,大客车55.3%,名列第3。设备对货车的识别率明显低于对客车的识别,各种货车的识别率存在较大差异,大型货车的识别率相对比较高,其次为集装箱和特大货,精度分别为45.7%和34.8%,车型识别率最低的为小型货车,误差达2.04倍,如图6所示。
2.4 稳定性比较
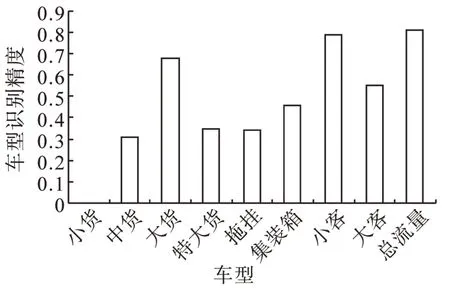
图6 全天24小时分车型精度(2010年)Fig.6 Vehicle identification accuracy of 24 hours
2006—2011 年运行期间,根据监控记录,设备因故障或受到相关因素的影响出现停测情况,使得检测数据缺失。具体缺失天数为:2006年41天(5~12月运行天数275天),2007年41天(全年运行天数365天),2008年37天(全年运行天数366天),2009年8天(全年运行天数365天),2010年48天(全年运行天数365天),2011年0天(1~4月运行天数120天)。运行期间总时间1 856天,有数据(基本正常)天数1 681天,根据可靠度R计算值为90.6%。
2.5 精度分析
视频检测设备的车流量精度夜间高于白天,分车型平均精度则是白天高于夜间。分析原因可能是夜间通过道路断面的车流量大为减少,使得车辆间保持一定的间距,对检测探头的干扰减少,有利于检测精度的提高。另一方面,由于夜间光照度较白天下降,尽管路侧设有高杆灯,但对于CCD摄像机来说,主要依靠视频图像清晰度来检测识别车型,就如同夜间拍摄照片无法与白天相比,即使阴天拍出的照片也好过夜间的照片,故就车型识别而言,白天的精度高于夜间是可以理解的。小型货车的识别率低,跟车型分类标准有关。根据《固定式交通量调查设备技术条件》[8]中的机动车分类与分型规则,小型汽车包含小客和小货两种类型,判定标准为车长<6 m的客车、货车及专用汽车。人工容易识别货车和客车,但判别中小货车类型的方法,主要根据车轴数量和车牌照颜色,对车身长度的判别只能依靠个人经验;而设备能够根据通过检测区的车辆图像,由计算机根据图像识别算法,做出车型长度判别。人机之间在标准掌握尺度上存在差异,不免会产生识别误差。
根据设备检测数据与人工观测数据对比结果,24小时流量精度为81.4%,与理论上所能达到的95%以上的精度值相比,似乎应用效果并不理想,仍需在进一步提高精度方面做出努力。首先要从改善硬件性能和图像识别软件算法的设计上入手,提高系统整体性能,更好地适应道路检测环境;其次需要加强设备的日常维护,使得设备能够经常处于干燥、无尘的环境中安全有效地运行;第三,要确保供电和网络通信的稳定与畅通,这是采集数据能够被及时处理分析的重要基础,要事先为交调检测系统所处的工作环境做出合理选择和配置。
3 设备运行状况及故障分析
根据视频检测设备投入运行后连续24个月的交调监控与维护记录,显示基本正常运行月份在14个,占比58.3%,有效数据606天,占比82.9%。具体故障表现为以下几个方面:①摄象机、主机等室外设备屡遭雷击致故障。经排查主要原因在于防雷系统设计不够完善,摄象机中缺少视频防雷器、室内机柜无接地。②摄象机电源线路引起供电跳闸,由于摄像机及其防护罩暴露于大气中,日晒雨淋后未及时清洁干燥,极有可能会引起连接线路的短路故障。③电源电压不稳以及UPS出现故障。四是室内设备电线易遭鼠咬断裂导致数据中断。此外诸如通讯网线脱落,GPRS无线模块卡欠费等方面的维护不及时均会导致一系列故障。
4 结语
VT2100视频检测设备的车流量精度较好,分车型精度不理想,设备的稳定性存在一定问题。影响设备性能发挥的主要因素大致有以下几种:①网络的稳定性;②市电电压稳定性;③设备防雷设计与安装施工存在不完善;④系统抗干扰设计尚待优化,以便更好地适应全天候的室外工作环境。
[1]高敬红,杨宜民.道路交通车辆检测技术及发展综述[J].公路交通技术,2012(1):116-119.
[2]彭春华,刘建业.车辆检测传感器综述[J].传感器与微系统,2007(6):4-7.
[3]刘玉新.常用车辆检测器性能比较与应用前景分析[J].公路交通科技:应用技术版,2007(10):26-27.
[4]李文举.智能交通中图像处理技术应用的研究[D].大连:海事大学,2005.
[5]张文溥.视频车辆检测技术及发展趋势[J].中国人民公安大学学报:自然科学版,2010(1):91-94.
[6]刘文智.视频车辆检测器在高速公路上的应用[J].公路交通科技,2003(2):88-91.
[7]陈德望,高海军.城市高速道路微波检测器RTMS的检测精度分析[J].公路交通科技,2002(5):122-124.
[8]池璐,马永庆.固定式交通流量调查设备技术条件[R].北京:交通部规划研究院,2007:8-58.
