基于磁线导引的双转向架驱动AGV应用研究
2014-12-19金亚萍耿牛牛史伟伟许鹏鹏
孟 琦,金亚萍,耿牛牛,史伟伟,许鹏鹏
MENG Qi, JIN Ya-ping, GENG Niu-niu, SHI Wei-wei, XU Peng-peng
(机械科学研究总院,北京 100044)
0 引言
AGV是Automatic Guided Vehicles的简称,属于轮式移动机器人(WMR——Wheeled Mobile Robot)的范畴。根据美国物流协会定义,AGV是指装备有电磁或光学自动导引装置,能够沿规定的导引路径行驶,具有小车编程与停车选择装置、安全保护以及各种移载功能的运输小车[1,2]。近年来,AGV产业在中国得到了迅速的发展与推广应用,尤其是柔性加工装配生产线中,如汽车,农机,工程车辆,纺织机械等等。
国内对于磁导引AGV的研究有很多,文献[3]介绍了单舵轮驱动磁导引AGV的一种导航算法,文献[4]对差速驱动磁导引AGV进行了研究论述,文献[5]对AGV在汽车保险杆生产线上的应用进行了研究,其驱动方式为前轮转向后轮驱动。本文为达到平移、车身高度低、载重大等需求,选取双转向架驱动AGV进行研究,同时实现AGV全方位行走。
1 数学模型与运动学方程
研究的双转向架驱动AGV,其机械结构如图1所示,每一个转向架是一个单独的差速机构,由两个驱动轮配合控制转向架前进速度与角度。主要安装驱动轮计数器,转向编码器,磁传感器与RFID读写器等传感器。
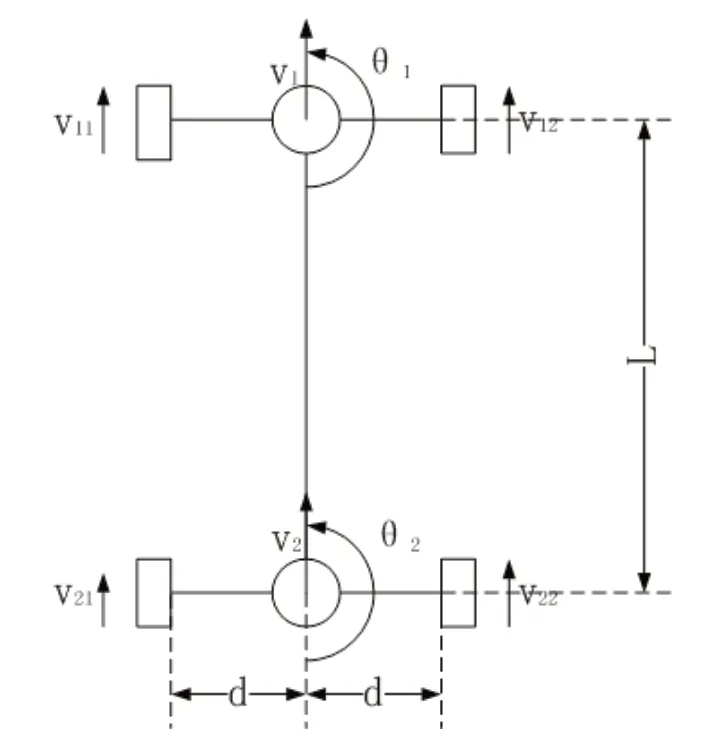
图1 双转向架驱动AGV机械结构示意图
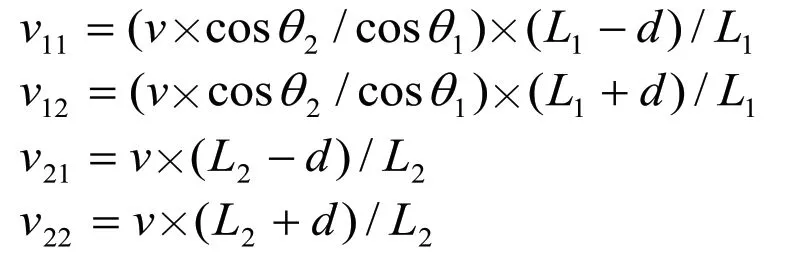
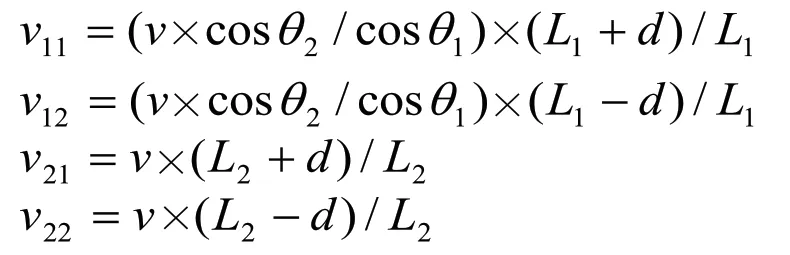
参考图1,得出双转向架驱动AGV的数学模型。输出变量为四台电机的速度,v11、v12、v21、v22。输入变量为系统需求AGV速度为v,和编码器测得转向角θ1、θ2。数学模型的作用就是由输入变量求出输出变量。规定速度v 向前为正,值为沿速度方向在前端转向架的速度,转向角逆时针为正。其中:v1,v2为转向架的速度,其方向与转向架方向垂直。是计算的中间变量。d,L为机械尺寸,L为两转向架间距,d为转向架中心到驱动轮的距离。
车体坐标系,原点定义在车身前桥中心,纵坐标为车体中轴线,如图2所示其中:
O1(0,0),O2(0,-L)。R为前后转向架轴线的交点,L1=O1R,L2=O2R。
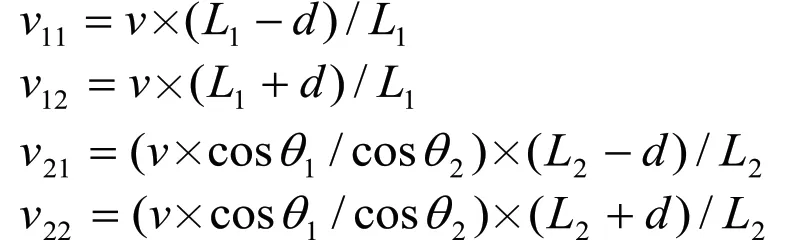
通过计算,得出数学模型:
当-90°<θ1、θ2<90°时:
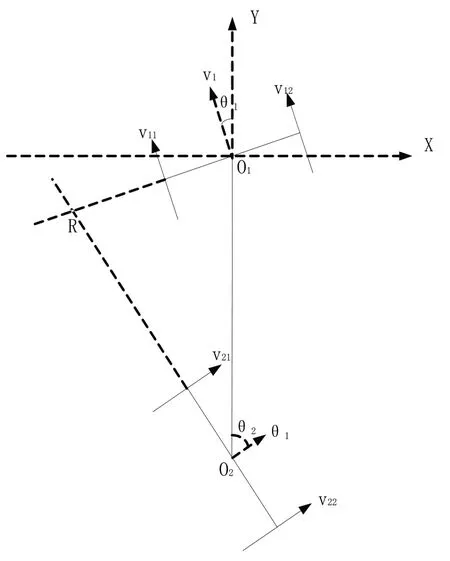
图2 车体坐标系
当xR<0时:
当xR>0时
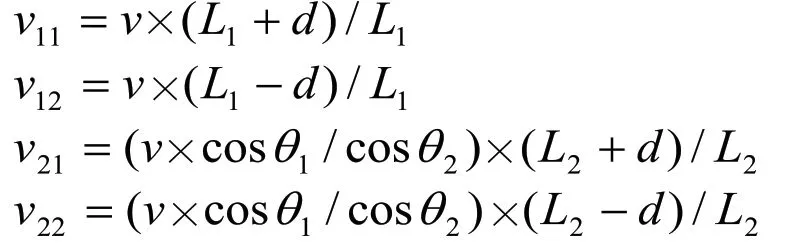
当-270°<θ1、θ2<- 90°或者90°<θ1、θ2<270°时
当xR<0时
当xR>0时
当两个转向架角度都在90°左右时,cosθ2和cosθ1都趋于0,此时用公式计算两转向架速度会造成很大的误差。所以当AGV运行在平移模式和差速模式时,认为v1=v2,即cosθ2/cos θ1=1。
研究的双转向架驱动AGV是选用磁线导引,所以动力学模型为一维模型,非常简单。
其中:S为行驶距离,v为AGV速度,t为时间。
文献[6]介绍了基于激光导引的四轮差速驱动AGV,和本文所述的双转向架驱动方式相同,但由于导航方式不同所以数学模型和运动学模型有一些区别。
2 运动控制与纠偏算法
2.1 运动控制结构
设计的双转向架驱动AGV控制结构如图3所示。
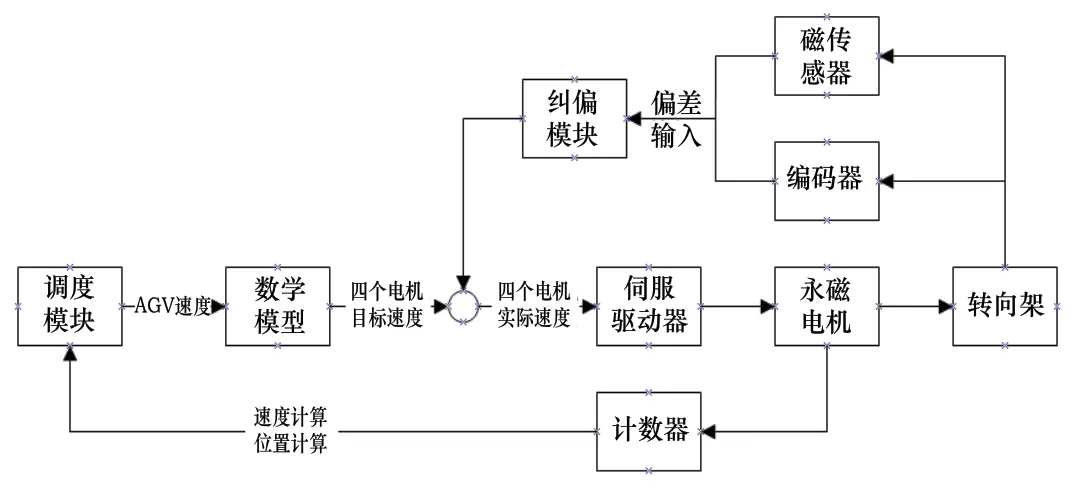
图3 双转向架驱动AGV控制结构图
运动控制模块接收车载控制系统的速度信号与快速停车信号,以及外部的急停信号作为输入。计数器提供速度反馈,磁传感器与编码器做偏差反馈。输出为四路电机控制信号传给伺服驱动器,伺服驱动器控制永磁电机,永磁电机带动转向架运转。
2.2 纠偏算法
采用的纠偏算法为传统的PID算法。近年来将模糊控制应用于AGV上的研究很多,但对于磁线导航,AGV行进路线简单固定,又为连续导航,并且本文并没有设计自动避障功能。所以模糊控制较于PID算法的高实时性在基于磁线导引的应用环境中体现不明显,PID算法同样能得到较好的鲁棒性,并且可靠性高更适合此环境。文献[7]中对此问题也有论述。
由于AGV小车本身的惯性起到了PID控制中积分I控制的作用,所以本文采取PD控制,D取值不当容易造成系统震荡,所以根据实际情况有选择使用。
PID控制器的控制表达式为:
式中,u(t)为控制量输出,e(t)为偏差输入。
为了实现控制AGV全向行走,设计了三种模式:寻线模式、平移模式、差速模式。寻线模式用于常规行进与转弯,平移模式用于平移运动与蟹形前进,差速模式用于停靠站台。三种模式实际应用在第三节——运行实验中有所展示。三种模式的控制流程相同,都采取PID控制器,但输入e(t)不同。
所研究的AGV系统除了要纠正沿磁条行走时产生的姿态偏差e(t),还要对AGV小车当前位置信息进行修正。位置计算由永磁电机计数器反馈值进行速度换算,积分后得到位置信息。位置误差主要有计数器的累积误差产生,本文采用RFID传感器来修正位置误差。在AGV行驶路径上,固定位置放置RFID码片,当AGV经过时,RFID读写器读取码片信息,修正当前位置。编写控制程序,当AGV知道自己位置后,通过比对预先存入控制系统中的地图信息,根据运行需求切换动作模式。
通过研究,采取基于PID控制的纠偏算法,结合RFID的位置纠偏与设计的运动流程,保证AGV小车精确可靠的沿磁条前进,并设计了三种运行模式来实现自动全方位行走。
3 运行实验
设计的运行实验示意图如图4所示。图中线段表示运行线路,箭头及数字表示线段方向及端点号,圆点与数字代表RFID码片位置,空心圆为站台位置,表示AGV小车尖头代表方向。在本文所设计的实验中:AGV小车自动从站台2运行到站台1,再从站台1运行到站台2,如此反复运行。在7→1、1→2、2→3为寻线模式,2→8、8→2为差速模式,3→4平移模式,4→5、5→6、6→7同样为寻线模式,单在5和6的位置完成原地旋转90°。
实验内容:运行20圈,在站台1与站台2分别停靠20次,测量左右姿态偏差与前后位置误差。
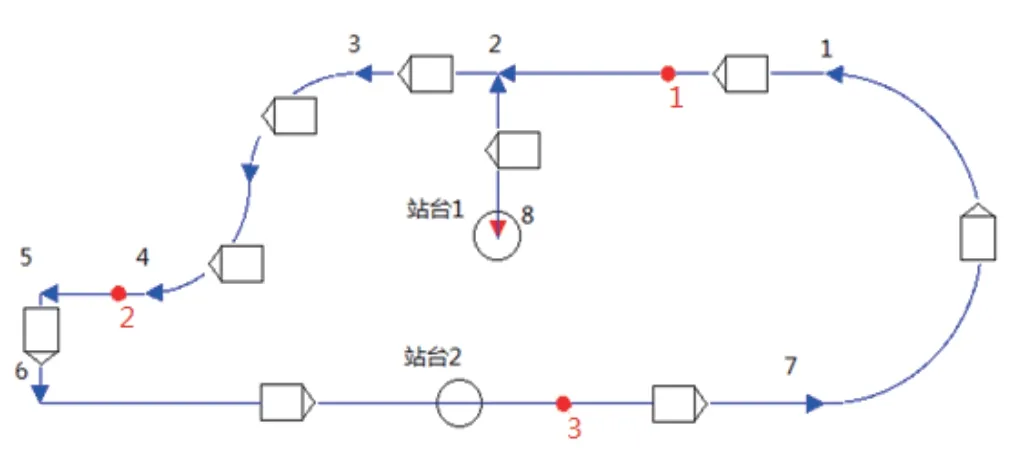
图4 运行实验示意图
通过实验,在停位点,其左右姿态偏差与前后位置偏差均在±10mm以内,完全满足实际工业需求。在实验中,AGV能自如的切换三种运行模式,在设计的实验路线上,完成前进、圆弧转弯、平移进站/出站、蟹型运动、原地转向,基本完成了全方位行走的测试。并在出弯入弯与切换姿态等易造成较大误差的位置,运行并无明显晃动,说明模型与控制算法可行。
4 结论
参考AGV技术在实际应用情况以及对未来发展的分析,设计选取了新型的双转向架驱动AGV应用进行研究,来解决工业实际中出现的一些需求。对于新应用环境与新的AGV驱动方式,通过合理的设计,采取传统的PID控制算法依然可以达到高精度、高鲁棒性。对于磁线导引的双转向架驱动AGV车型,采用研究得出的控制纠偏方式,可以实现全方位行走,应用于实际。
[1]Safety Manager.中文参考手册[K].霍尼韦尔公司,2009.
[2]周驰东,楼佩煌,王辉,张烔.移载式磁导航AGV关键技术研究[J].工业控制计算机,2012.
[3]朱从民,黄玉美,上官望义,马斌良.AGV多传感器导航系统研究[J].仪器科学学报,2008.
[4]冯峰.AGV自动导引小车控制系统研究[D].江苏:江苏科技大学,2008.
[5]宋学贤.AGV技术在汽车保险杠生产线的应用研究[D].武汉:武汉工程大学,2013.
[6]倪振.激光导引四轮差动全方位移动AGV关键技术研究[D].重庆:重庆大学,2013.
[7]卢杉.基于单片机的差速驱动导引小车运动控制[D].西安:西安理工大学,2010.
