工业机器人运动学逆解的几何求解方法
2014-12-19黄晨华
黄晨华
HUANG Chen-hua
(韶关学院 物理与机电工程学院,韶关 512005)
0 引言
工业机器人的运动学是工业机器人控制与轨迹规划的基础,其内容包括正运动学和逆运动学。当给定机器人所有关节转过的角度时,可以通过机器人的正动学方程来确定其末端操作器的位解;当已知机器人末端操作器的位置时,则可根据运行学逆解获得各关节需转过后角度。机器人运动学建模的标准方法,即D-H建模,可以很方便地得到机器人的正运动学方程,而要获得机器人的逆运动学方程,则难度较大,求解的方法可以分成两大类:数值解和封闭解。Tsai[2]等研究了通用的6自由度和5自由度的机械臂的数值解,Nakamura[3]等研究了适用了机器人控制的带有奇点鲁棒控制的数值逆解,Baker[4]等研究了冗余机械臂的数值逆解,数值解的最大不足就是计算时比较耗时,对系统造成较大的负担。封闭解是基于解析形式的解法,其又可分为代数法和几何法,用代数法求逆解在很多机器人经典教材和文献中都有详细的论述[5~7],在此不作具体讨论,刘达[8]等为了使机器人获得更好的实时性,提出了一种解析和数值相结合的机器人逆解算法,陈庆诚[9]等提出基于旋量理论的逆运动学子问题求解算法。用几何法求解机器人运动学逆解,则少有文献作详细论述,以5自由度工业机器人为例,对几何法作深入的探讨。
1 机器人结构
机器人有五自由度,最后2关节相交一点,从结构上分析,此机器人存在运动学逆解。机器人的实物图如图1所示,各关节坐标如图2所示。机器人的DH参数如表1所示。

图1 5自由度机器人
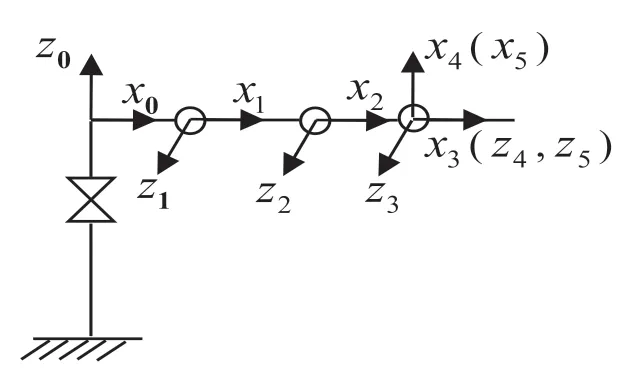
图2 机器人关节坐标设置

表1 机器人DH参数
各关节间的变换矩阵为:
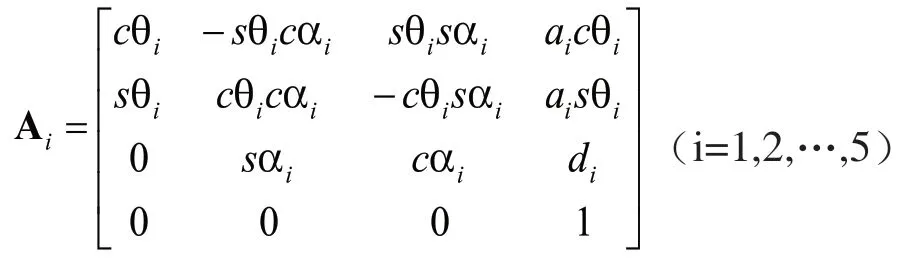
式中,cθi=cosθi,sθi=sinθi。
2 机器人运动学逆解
2.1 几何解法[10]
使用几何法获得机器人逆解的首要条件是机器人存在封闭解,现在机器人在结构上一般都能满足这一要求。求解过程如下:
1)分析机器人各自由度对机器人位姿的影响,即哪些自由度的变化只影响机器人末端操作器的位置,哪些自由度的变化只影响机器人末端操作器的姿态;
2)求机器人的位置逆解方程,忽略对机器人位置没有影响的结构,在机器人的基坐标内求位置逆解方程;
3)求机器人的姿态逆解方程,利用已求解的位置解,通过矩阵变换,可很方便地求出姿态逆解。
2.2 机器人逆解的几何求法
由图2可知,机器人的最后两个关节相交于一点,为计算简便,把机器人的工具坐标也设于此点,且与最后一关节坐标重合。
设末端操作器的位置坐标值为(xe,ye,ze),姿态用欧拉角表示,其姿态矩阵为:

2.2.1 位置逆解求解
与位置相关关节变量有 θ1,θ2和 θ3,参考机器人结构示意图(如图3所示),分别用几何法求解。
1)θ1求解
机器人的结构投影如图4所示。
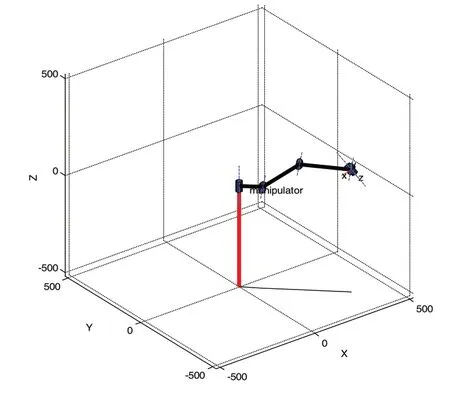
图3 机器人结构示意图

图4 关节1在x0-y0平面的投影
由图4可得:

或:

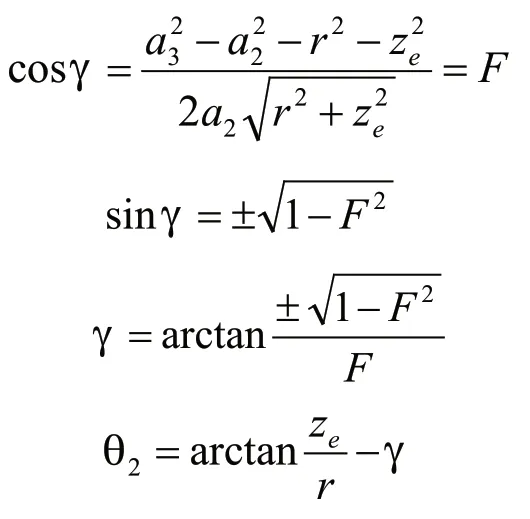
2)θ2,θ3求解
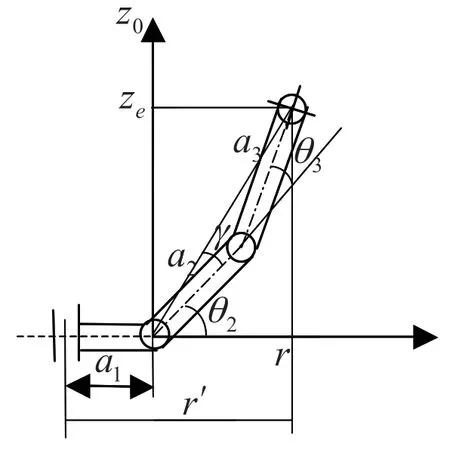
图5 关节2、3在z0-r平面的投影
由图5中的几何关系,可得:
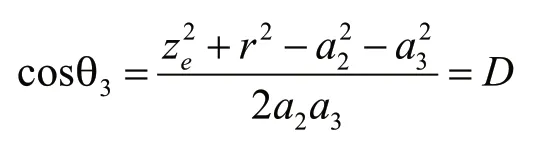
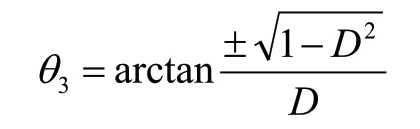
则有:

因此:
同理:
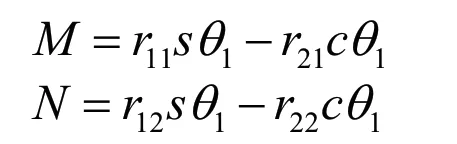
2.2.2 姿态逆解求解
由各关节的变换矩阵有:

因 θ1,θ2,θ3已求得,且T为已知,对上式进行变换,有:

因篇幅有限,具体推算过程略,计算结果如下:

式中:

式中:
3 仿真验证
假设机器人各关节的转动不受任何限制,首先设各关节的转动任意角度,具体数值如表2所示,利用机器人正运动学方程,获得机器人末端操作器的位置和姿态,然后此位置和姿态,用所求得的逆解方程求各相应的转角,看与预先假设的各关节的转角是否相等。从表3的数值可以得出,用几何法所获得的机器人逆解是正确的。需要说明的是为了仿真程序编写简单,仿真的数据均限制在[0,1]之间,但不影响结论的正确性。

表2 各关节转角假设值(rad)
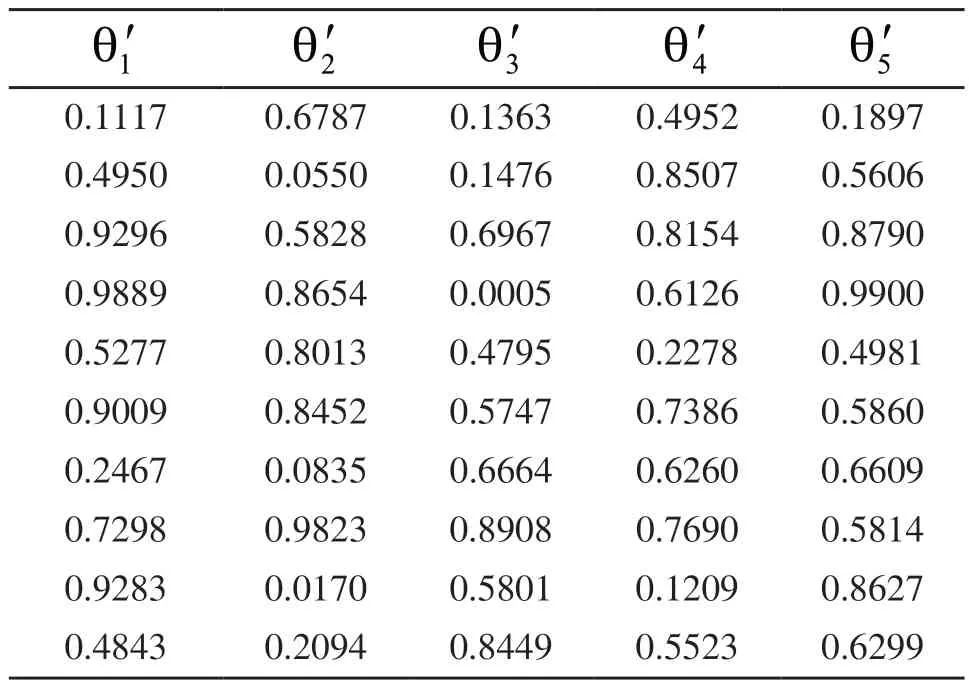
表3 逆解方程所求得的各转角(rad)
4 结论
针对工业机器人运动学逆解求解的问题,以5自由度机器人为例,深入探讨了几何法求逆的方法和过程,并以仿真的手段验证了方法的可行性。从求解过程中,可得出几何法求逆具有以下特点:1)直观、简便,只需进行简单的几何推导即可获得位置逆解;2)计算量小,姿态逆解只需一步矩阵运算即可求得。
[1]Denavit,J.,R.,Hartenberg S..A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices[J].ASME Journal of Applied Mechanics,June 1955,215-221.
[2]Tsai L.,Morgan A..Solving the Kinematics of the Most General Six-and Five-degree-of-freedom Manipulators by Continuation Methods[A].ASME Mechanisms Conference[C].Boston,Oct.7-10,1984,84-DET-20.
[3]Nakamura Y.,Hanafusa H..Inverse Kinematic Solutions with Singularity Robustness for Robot Manipulator Control[J].ASME Journal of Dynamic Systems,Measurement,and Control,1986,108.
[4]Baker D.,Wampler C..On the Inverse Kinematics of Redundant Manipulators[J].International Journal of Robotics Research,1988,7(2).
[5]Saeed B.Niku.Introduction to Robotics Analysis,Control,Applications(Second Edition)[M].Beijing,Publishing House of Electronics Industry,2013,3:66-70.
[6]John J.Craig.Introduction to Robotics Mechanics and Control(Third Edition)[M].Beijing,China Machine Press,2013:83-86.
[7]王战中,杨长建,刘超颖,等.MATLAB环境下六自由度焊接机器人运动学逆解及优化[J].机械设计与制造,2013(7):182-184.
[8]刘 达,王田苗.一种解析和数值相结合的机器人逆解算法[J].北京航空航天大学学报,2007(6):728-730.
[9]陈庆诚,朱世强,王宣银.基于旋量理论的串联机器人逆解子问题求解算法[J].浙江大学学报(工学版),2014(1):8-14.
[10]Lee C.S.G.,Ziegler M..Geometric Approach in Solving Inverse Kinematics of PUMA Robots[J].IEEE Transactions on Aerospace and Electronic Systems,1984,AES-20(6).
