全方位移动式AGV技术研究
2014-12-19苏永华
苏永华
SU Yong-hua
(北京机械工业自动化研究所,北京 100120)
0 引言
AGV(Automated Guided Vehicles)由于其具有自动化程度高、安全、灵活等特点,因而广泛应用于汽车制造、机械加工等自动化生产和物流配送系统。它是柔性制造生产线和自动化物流配送中心的关键设备之一。随着产业升级以及技术进步,AGV 越来越被广泛应用于各个生产行业中。
传统的AGV通常是基于通过电脑来控制其行进路线以及行为,装备有电磁或光学等自动导引装置,沿规定的导引路径行驶,通常采用单轮驱动(SD)或差轮驱动(DIFF)方式。
全方位式AGV则更适合在空间狭小的生产车间中工作,由于采用全方位驱动(QUAD),对比传统的AGV具备更高的运动灵活性,更适合大型高密度立体仓库的场合。对于大型重物的搬运,由于全方位式AGV能够在有限空间里的快速准确移动定位,通过多个AGV协作搬运,能够形成远大于单个AGV的搬运能力。而多个AGV成的协作系统,在设计复杂性和成本等方面都优于能力特别强的单AGV,是未来AGV技术的重点发展方向。
本文通过研究全方位移动式AGV移载装备的控制原理和方法,描述了基于激光、视觉等多传感器融合的定位技术以及多AGV移载设备协同工作的搬运系统。该系统综合了AGV开发的三个重要技术:AGV全方位移动式控制技术、AGV协作搬运技术以及多传感器融合导引技术。上述三项技术能够显著提升AGV的控制性能,运行速度更快,对大批量搬运作业的任务执行响应更快,配置方式更灵活。
1 AGV系统简介
本文设计的全方位式AGV硬件系统主要组成部分包括动力系统、导引系统、辅助照明系统和车体本身。动力系统中相对普通AGV系统增加了协作搬运系统模块;导引系统则根据新技术发展增加了综合视觉导引系统;在照明系统中添加了协作照明系统,小车间能够互相辅助照明,有效解决由于搬运过程中,AGV小车互相遮挡带来的阴影和目标对象难以分辨的问题。图1为AGV硬件平台的具体构成。
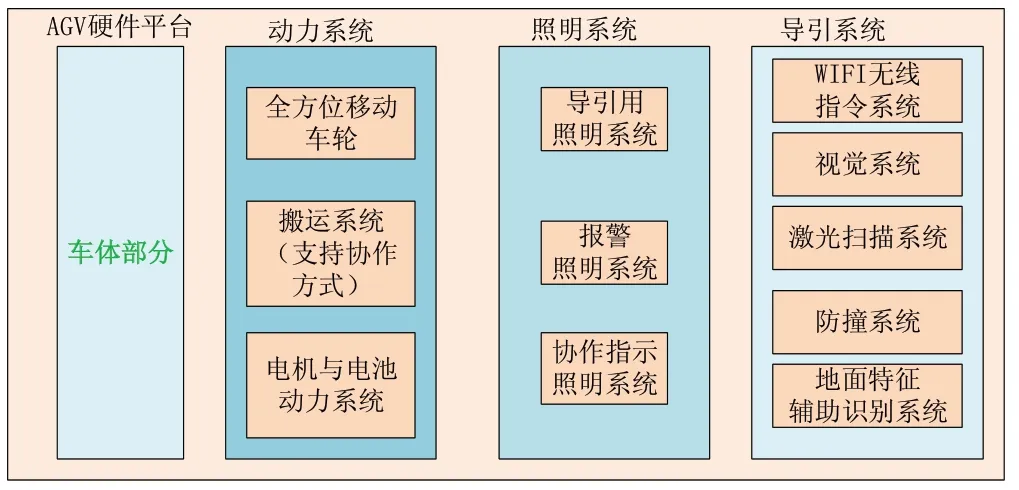
图1 AGV硬件平台
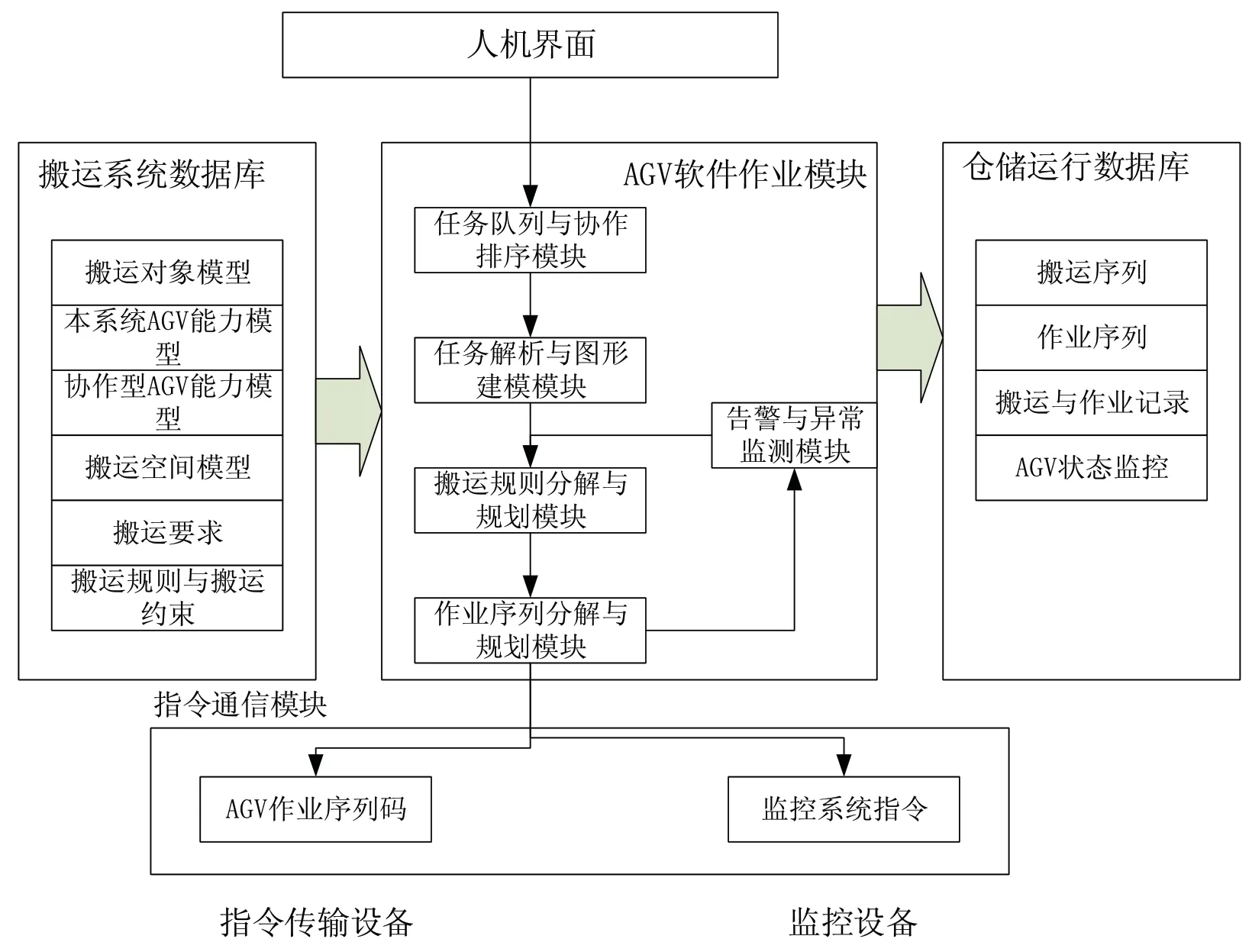
图2 AGV系统软件组成
在该硬件平台上,需和AGV软件平台配套实现满足协作装载、作业调度的功能,其结构如图2所示。
该AGV系统通过人机界面形成交互,并根据输入的指令以及搬运系统数据库,生成适合当前AGV工作状态的作业序列。同时根据根据现场情况进行动态规划,并根据事先指定的最优化目标(例如时间最优或能耗最优等),选择是否进行协作作业或单独作业,并生成当前各个AGV的作业序列码。
软件系统生产AGV作业序列码的同时,还将相关指令传输到监控设备,用于监测异常,保证统的正常运行。当前AGV指令序列如果执行异常或AGV小车发生异常,将通过监控系统反馈确认,并由软件作业模块重新规划AGV作业队列,同时产生报警等等信息。
2 全向式AGV实现的关键技术
全向式AGV系统的实现,重点在于其灵活性和协作装载,因此关键点在于:1)AGV 的全方位轮驱动技术。2)基于激光、视觉等多传感器融合的导引技术。3)多AGV的协作装载技术。
2.1 AGV全方位轮驱技术
采用重载型全方位轮的机构设计实现AGV的全方位自由移动,核心设备采用4个麦卡那姆轮组成。对于全方位轮由于采用自由滚轮导致越障能力减弱以及由于其结构特性带来的运动打滑的缺陷,通过优化滚轮的悬挂结构,建立转轮/动力驱动的运动优化模型,通过姿态控制环路与运动控制大环路结合的方法,优化轮动驱动,防止上述故障的发生。图3为轮向控制涉及的硬件配置图。
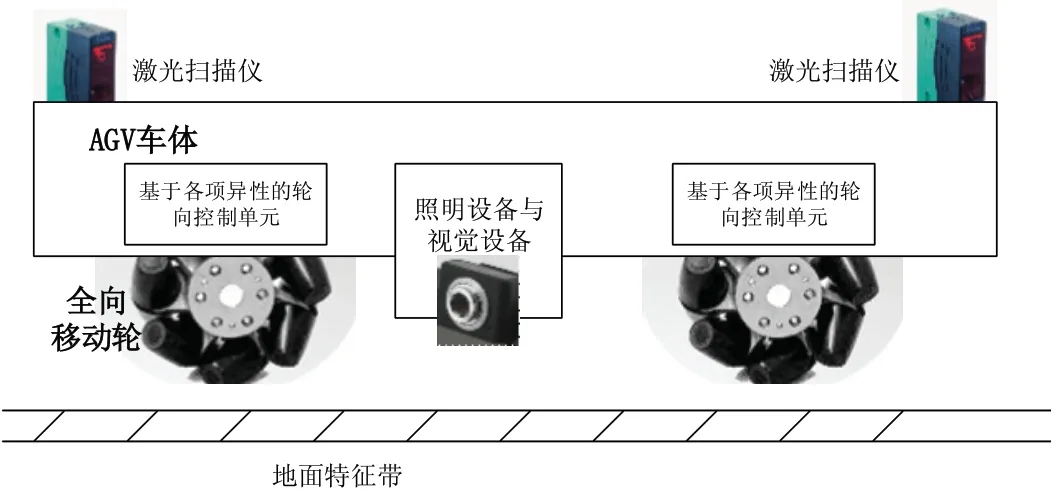
图3 轮向控制硬件配置图
全方位移动AGV的各向最大速度、运动稳定性、运动效率都存在着各向相异性,从而AGV沿各向运动的效果存在很大差异,传统的运动控制方法无法充分发挥全方位移动AGV的运动优越性。而现代的AGV应用,对运动稳定性、平滑性以及效率功耗方面提出了更高的要求。为满足以上运动要求,在控制全方位移动AGV时,本项目通过引入各向相异性,解决在高速下的多轴速度协调问题以及高速运动时的稳定性问题,实现姿态优先的全方位移动的精确协调控制,达到运动规划的高效性目的;同时获得对系统干扰及参数变化具有完全的自适应性与不变性的控制效果,优化AGV无碰撞路径,从而提出一套适用于要求高速、稳定且效率高的应用场合下全方位移动式AGV的运动控制方法。
基于各向相异性特性的轮驱技术,核心控制流程图如图4所示。

图4 AGV轮驱内环控制流程图
在求解AGV的路径规划与运动作业指令时,同样考虑了AGV的各项异性轮驱特性,并形成基于AGV轮驱的运动外环控制流程。外环流程中以传统的人工势场法作为初始规划方案,并引入路径障碍物模型,实时给出AGV的安全避障区间,到达目标点的短路径区间等关键结果。路障模型支持动态添加与自动识别添加。AGV的运动控制流程图如图5所示。
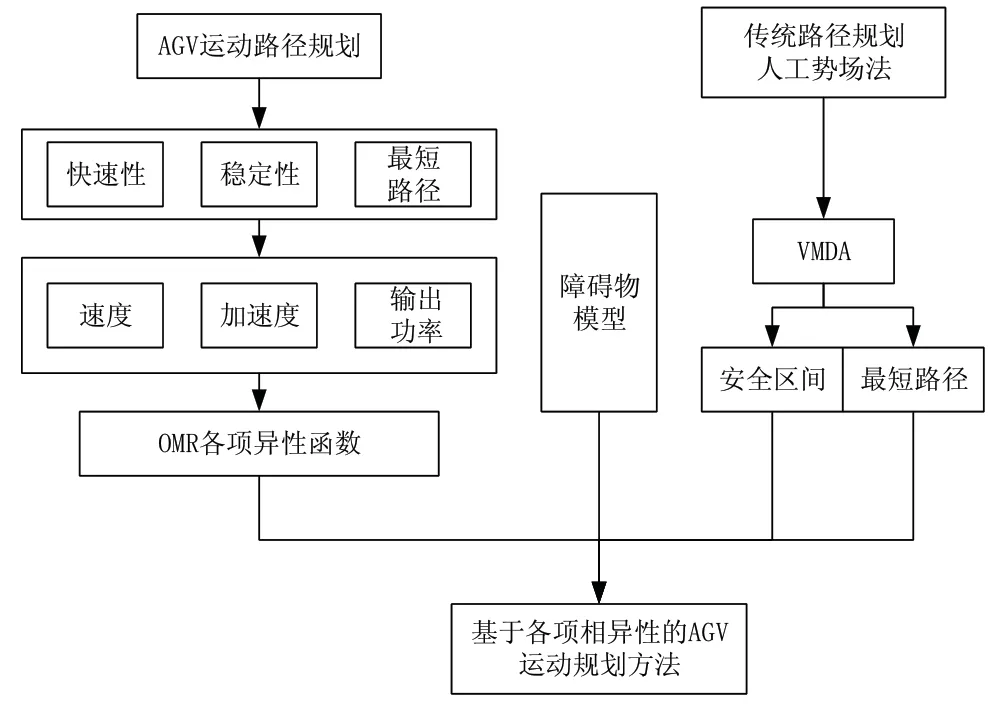
图5 基于各项异性的AGV运动规划流程
2.2 定位导引与防撞技术
1)定位技术
首先在AGV需要经过的路线上铺设特征带,在AGV车体底部架设视觉传感设备,当AGV车体在特征带上经过时,通过视觉系统对特征带上图案的识别,实现AGV的精确定位。基于普通特征模板匹配直观易懂,但在实际应用中面临许多困难,主要表现在当存在光照、视角等变换时,无法得到正确的匹配结果。项目组经过多次测试,发现图像模板借鉴传统二维码方式时,鉴别率最高。因此采用二维码框架,作为模板基础。具体示意图如图6所示。
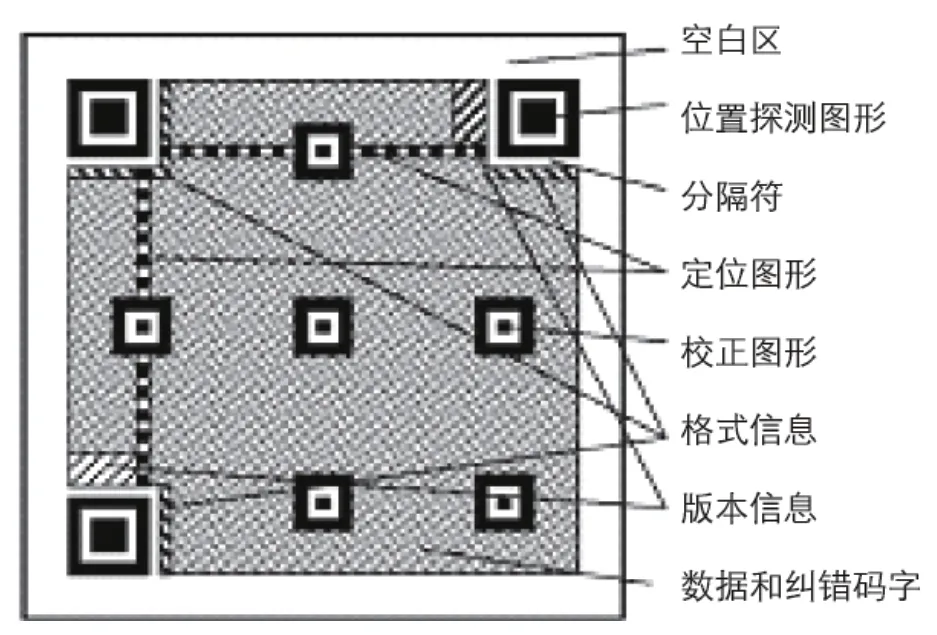
图6 二维码定位模板
这种模板由正方形黑色边框构成,内部在规定位置上印有不同图案。经阈值分割后,可以比较容易的提取黑色边框的四条边缘,利用四条边缘的图像坐标与已知的模板信息,可以计算出该模板的投影变换。经过投影反变换,即可将图像转为类似模板库中的图像,从而可以方便的利用模板匹配法识别出该图形的种类,解决了模板匹配法无法应对投影变换的问题。
如果实际物流系统中定位点数量不超过65536处,携带的信息量较少,可以将二维码图案进行简化或者直接采用二维码版本(即21×21大小)。本项目的内部图案设计成如图7所示,方便提高识别率。
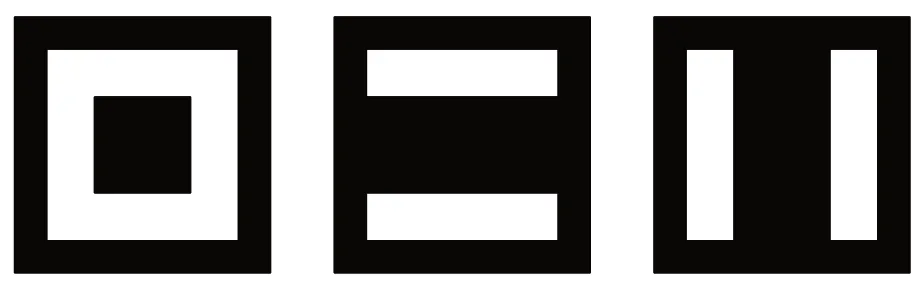
图7 定位用的内部简化码型图
定位、导引方法研究将所有跟踪识别到的特征点形成空间位置地图,并针对其出现与消失进行有效管理,帮助实现位姿估计。在新的特征点出现并识别后,记录并纳入到地图结构中。在特征点稳定出现并成功跟踪后,在地图构建中记录连续几帧的位置;特征点消失或不再能观察识别后,从地图中删除特征点的信息。为成功实现位姿估计,在地图中需保持足够数目的特征点数量。图8为定位示意图。
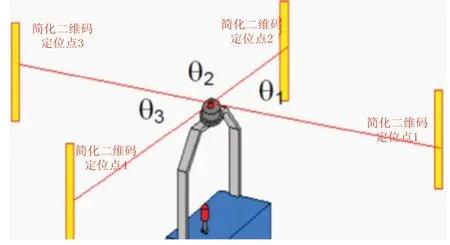
图8 AGV的定位示意图
2)防撞技术
考虑使用ZDM/SL激光扫描测距仪进行周边环境的检测,支持360°扫描。当小车到达危险区域或有障碍物阻挡时,AGV小车通过自身定位以及AGV上位系统指示,确定是否进行避让或者减速,当确定障碍物为非法闯入或非预设障碍物时,将快速停止运动。
考虑到激光扫描测距的成本较高,也可尝试通过配备视觉导引和红外反射式光电开关的方法进行防撞设计。视觉导引系统将根据行进路线上的物理进行较远距离识别(1m以上),确认不会阻挡前进或后退。当发现远端具备阻挡可能性后,将启动红外线光电开关进行精确探测,并做好防撞减速准备。当靠近障碍对象后,将通过红外最终确认,并采取对应措施。
2.3 多系统融合与多协作AGV技术
1)协作搬运技术
在多个AGV协作搬运过程中,AGV将作为一个整体进行协调,因此单个AGV的装载角度与姿态必须保持一致。因此AGV必须利用多维感知传感器感知部件相对位移,调整部件位置,同时防止多AGV协同搬运过程中对部件的损坏。对单个AGV小车而言,相对搬运整体的前进速度以及侧向位移均需要控制在一定范围内,必须稳定的控制算法实现运动过程中的精确同步协调控制。
另外,在协作搬移过程中,由于存在AGV之间的定位遮挡问题,因此需要设计辅助照明系统以及辅助定位系统,用于保证协作AGV之间位置信息的传递,实现精确行进路线和精确定位。
整体AGV的搬运协作流程图如图9所示。
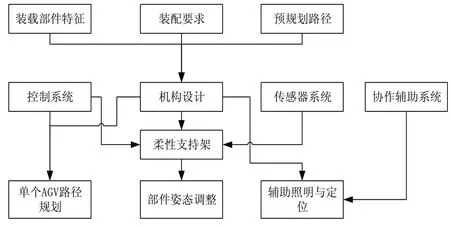
图9 AGV协作决策流程图
对于协作搬运中的单个AGV姿态调整则主要通过交叉耦合控制方法,通过姿态优先的调整策略,实现对AGV的全方位移动方式的准确控制。具体实现示意图如图10所示。
2)多技术智能体协同导引
多台AGV进行协同运动,主要采取主从控制方法。当前AGV小车将通过系统下发指令获知协作指令消息以及主从特性,并得到本次协作设备组的信息,包括主设备名称、从设备名称,集合地点等。
主从AGV设备到达集合地点后,主AGV将对从AGV设备启动协调控制指令。从设备间将通过定位信息以及算法获得主AGV的具体位置,并根据辅助信息完成多台AGV的协作运动控制。
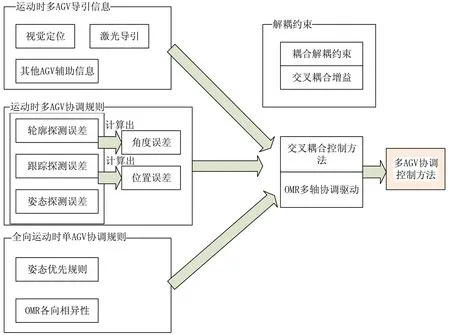
图10 协作AGV运动控制方法
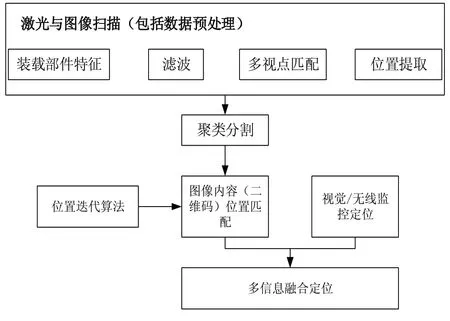
图11 多AGV协作处理定位方法
3 结束语
通过建立各向异性全方位轮模型,实现AGV的全方位自由移动,通过激光与视觉识别定位等多导引技术结合,实现准确定位,通过基于交叉耦合的多AGV同步协调运动控制方法,实现多AGV移载装备的合作搬运功能,在多智能体协同导引方面取得成功,可极大提高数字化装配操作的准确度和快速性,提升大型物件装运的整体效率。
[1]S.Takakuwa,Nagoya University.Efficient module-based modeling for a large-scale as/rs-agv systemISBN:0-7803-3383-7.
[2]叶菁.磁导式AGV控制系统设计与研究[J].武汉:武汉理工大学,2006.
[3]张智勇,等.AGV整体集成系统结构设计[J].物流技术,2004(4).
