螺旋轮式小型管道机器人及其驱动控制系统研究
2014-12-19刘彩霞龚德利
刘彩霞,龚德利
LIU Cai-xia,GONG De-li
(上海应用技术学院 机械工程学院,上海 201418)
0 引言
化工、制冷及核电站等相关领域,管道作为一种有效的物料输送手段应用极广。为了提高管道的寿命,防止泄漏,保证安全,管道机器人作为满足高效准确的故障诊断及定期检修的手段应运而生,其广泛地应用于管道的探伤、维修和焊接等诸多领域。
作业管径小于80mm的机器人一般称为小型管道机器人。在石油化工厂、热力交换站及核电设备厂等企业存在着大量微细管道,这些管道长期使用后可能存在腐蚀或机械损伤,会引起裂缝等,而裂缝对微细管道是致命的缺陷,可能造成严重事故。又微细管道所处的环境往往是人们不易直接到达或不允许人们直接进入的,且存在中毒、辐射等危险,检修难度大。因此,小型管道机器人在细小管道检测方面具有良好的应用前景[1],其能够在不破坏管道的基础上实现对管道的探测,并通过有线或无线的方式将探测结果输送出来。
近几年,国内外都对微小型管道机器人做了大量的研究工作,提出以仿生蠕动、惯性冲击、爬行、轮式驱动及螺旋推进等方式行动的微机器人,并在样机试制方面取得了重大突破。关于国内外的微小型管道机器人的典型研究,日本DENSO公司、日本东京大学、日本东芝公司和上海大学做了大量工作。日本DENSO公司等研制了无线双压电晶片执行器微机器人,上海大学开发研制了叠层压电执行器机器人、双压电晶片执行器机器人,日本东京工业大学研制了电机螺旋式推进机器人等[2~4]。
本文充分利用螺旋轮式驱动机构的优点,设计了Φ60mm螺旋轮式小型管道机器人。基于螺旋推进的轮式管道小型机器人具有一些独特的优点,如机器人本体结构紧凑、行走效率高、牵引力大以及控制较简单等,能以一定的速度平稳地运动,辅之以适当结构,可在弯管中行走。轮上的弹簧伸缩结构,使其能够有效地适应管道直径的微小变化。因其具有一定的带载能力,且易于与传感器集成,故在机器人本体上搭载了智能传感器检测装置。螺旋轮式小型管道机器人控制系统,结合单片机技术和计算机技术,实时监测和控制管道机器人的动作,可实现动作状态的存储或打印[5]。
1 螺旋轮式管道机器人的运动结构设计
管道机器人在能源供给设备的驱动下,作为检测装置的载体,欲在微小管道内平稳、可靠地行走、启停,必须满足三个基本条件:形封闭和力封闭,行走机构具有主动驱使机构。管道直径为60mm的螺旋轮式小型管道机器人,其运动机构由螺旋驱动机构、万向节、直流电机和保持机构组成,如图1所示。机器人的螺旋驱动机构上3对驱动轮对称轴线分布,每组由前后两个驱动轮组成,并与管壁呈一定的螺旋升角β,即与轴线不垂直。当直流电机通电时,通过万向节驱动三对驱动轮沿管壁做螺旋运动。驱动结构和保持机构产生沿管道切线方向的摩擦力,通过弹簧压紧管壁,防止保持机构转动,同时适应一定管径变化,通过万向节,将螺旋驱动轮的螺旋运动转化成保持机构的直线运动。保持机构不能转动,只能沿着轴线方向运动。改变直流电机的转动方向可以实现机器人行进方向改变[6]。
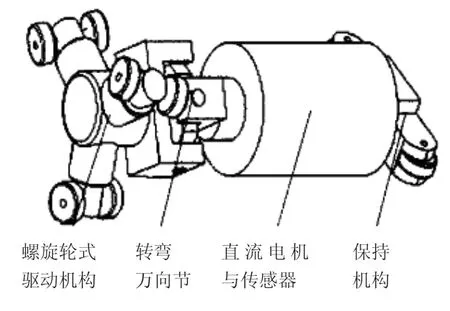
图1 螺旋轮式小型管道机器人模型结构图
2 螺旋轮式管道机器人系统的硬件设计
2.1 螺旋轮式管道机器人系统的总体结构
一个完整的管道机器人检测系统,可分为:移动载体、管道内部参数识别检测系统、信号传递和动力传输系统以及控制系统。控制系统又分为上位机控制系统和下位机(移动载体)控制系统。运算量主要集中在上位机,故本控制系统采用PC-ARM的方式。上位机负责图像处理和发送指令控制,下位机主要负责底层的控制和机器人行走速度信号的反馈,包括对行走电机的控制,反馈机器人的速度信息。
螺旋轮式小型管道机器人采用模块化的体系结构,每个模块独立运行,协调工作。系统总体结构如图2所示。
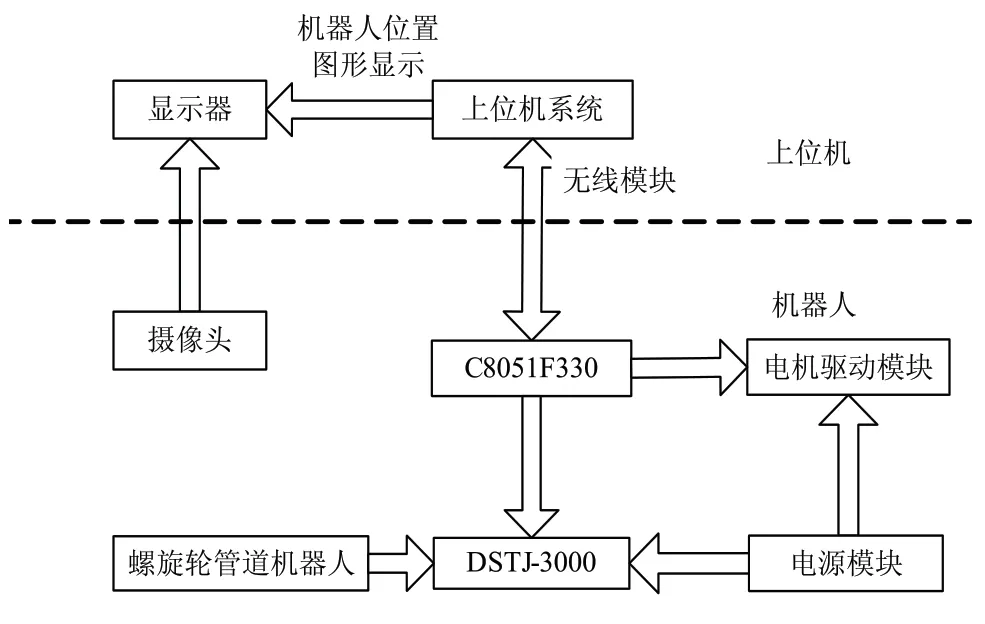
图2 螺旋轮式小型管道机器人系统的总体结构
螺旋轮式小型管道机器人系统由微型机器人、DSTJ-3000传感器、基于C8051F330的数据采集系统、蓝牙模块以及PC上位机的数据处理系统组成。智能差压压力传感器DSTJ-3000搭载在螺旋轮结构上。C8051F330单片机为系统的设计核心,负责完成传感器的数据采集、自动控制,以及与上位机的通讯,无线蓝牙模块实现数据的采集与无线传输。运算放大器将来自DSTJ-3000的微压力小信号放大,放大之后的大信号再进行滤波。单片机C8051F330直接接收该电压信号,经内部的ADC0模块放大滤波和A/D转变为数字量,经RS232串行口与蓝牙模块连接,完成管道内信号的检测,再通过蓝牙模块将信号作FSK(频移键控)调制后发送出去。电源模块为电机和传感器提供能源,单片机作为下位机组成前端测量单元,负责微型管道机器人对象参数的检测、融合等。PC机作为上位机,负责数据集中处理、控制等。蓝牙模块通过与上位PC的COM口相连来完成数据的无线接收。当接收到来自发送方的数据信号后,在单片机的控制下,把接收到的数字信号经内置的RS-232电平转换电路转换为计算机串口所需电平,再通过计算机对接收到的信号做进一步处理,实现对微型管道机器人的控制。
2.2 螺旋轮式管道机器人系统的硬件设计
小型机器人控制系统数据的采集和传输是关键,要求精度足够,数据处理量大,合适的单片机和传感器的选择尤为重要。单片机在后台工作,一方面考虑满足工作要求,另外考虑功能扩展,选择C8051F330作为控制芯片接收数据。智能传感器DSTJ-3000差压压力变送器,进行数据的测量和传输,其收发数据电路如图3所示,通过对控制芯片编写程序,实现各参数的控制。
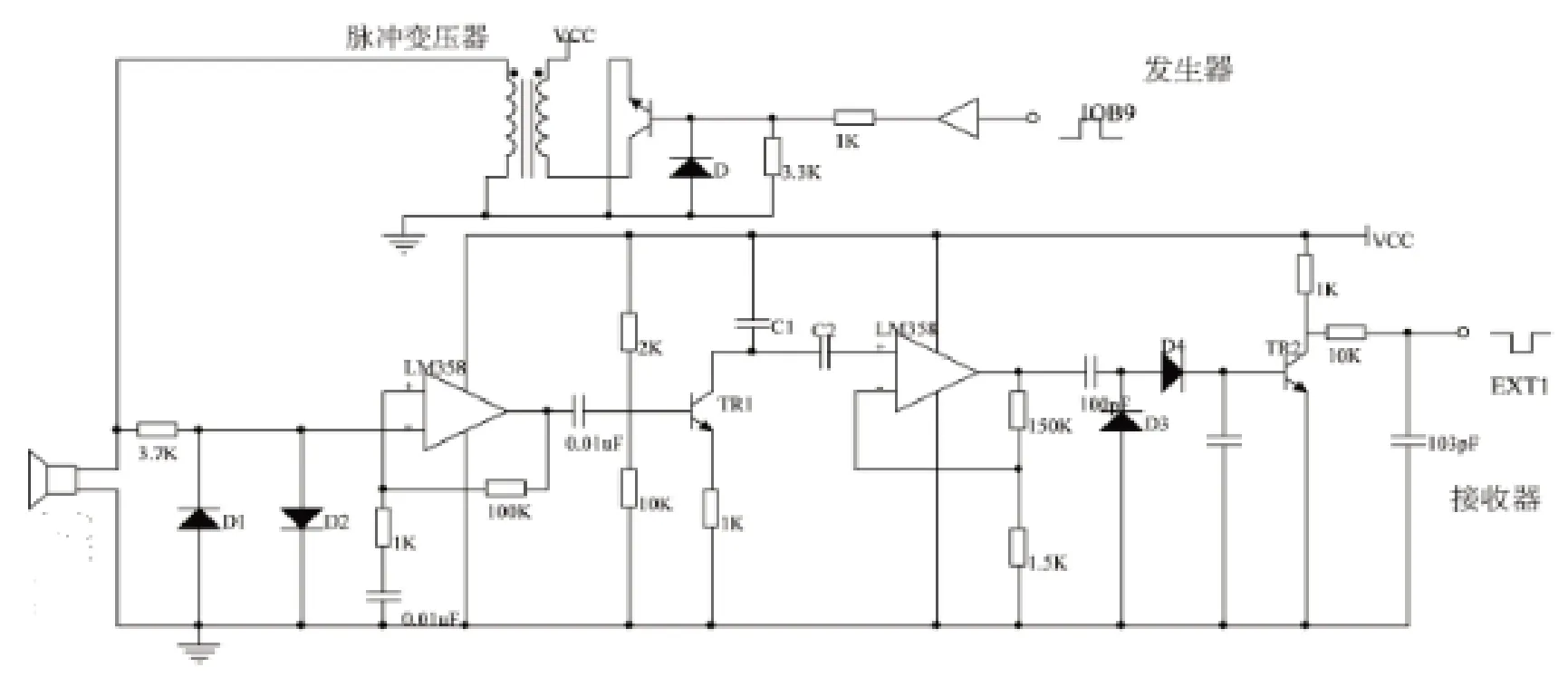
图3 DSTJ-3000智能传感器收发电路图
C8051F330使用Silicon Labs的专利CIP-51微控制器内核。CIP-51与MCS-51指令集完全兼容,可以使用标准803x/805x的汇编器和编译器进行软件开发。CIP-51内核具有标准8052的所有外设部件,包括4个16位计数器/定时器、一个具有增强波特率配置的全双工UART、一个增强型SPI端口、768字节内部RAM、128字节特殊功能寄存器(SFR)地址空间及17个I/O端口。C8051F330的硬件接口电路包括输入/输出模块、D/A转换模块、信号读取模块等。通过硬件接口电路,初始化串口、产生定时中断、读取机器人动作信号、急停信号,接收上位机指令并通过D/A转换信号实现对机器人的控制。
选择合适的敏感元件,从数据的采集速度和控制精度来考虑。智能传感器利用微处理机技术使传感器智能化,传感器不仅具有了视、嗅、味和听觉的功能,还具有存储、思维和逻辑判断、数据处理、自适应能力等功能,从而使传感器技术提高到一个新水平。美国Honeywell公司研制的DSTJ-3000型号的差压压力变送器,是最为成功的智能传感器。选择DSTJ-3000变送器,它在同一块半导体基片上用离子注射法扩散配置了差压、静压和温度三种传感元件,实现了功能的多选。其结构主要由变送器、现场通信器和传感器脉冲调制器组成。
无线网通信模块实现机器人与PC机的远程通讯。用户可以在远程PC上查看机器人的当前运动信息,对机器人的运行状况进行监控。为了降低成本,采用串行方式实现PC机与移动机器人的远程通信。原有Windows应用软件无需做任何修改,与使用本地串口一样,但又具有网络远程监控的功能。内建Web服务器,用于配置、诊断和监控串口设备。蓝牙技术是一种新型的短距离无线扩频通信技术,具有体积小、功耗低、全球开放性和良好的互操作性等特点。与传统的以电缆方式传输信息相比,应用在信号监测上,蓝牙技术的优点主要有:抗干扰能力强;现场连线少,信号检测方便等。蓝牙技术在检测系统的无线信号测量和自动化控制系统等方面有着很强的应用能力[7~10]。
3 螺旋轮式小型管道机器人软件设计
系统软件在单片机C8051F330的控制下完成来自智能传感器DSTJ-3000的微动作信号的采集、转换和传输以及与上位机的通讯功能。包括A/D采样、进制转换、单片机与蓝牙无线数传模块之间的数据交换,以及经蓝牙无线数传模块与PC机之间的数据互传。利用上位机软件系统,实时监测和控制管道机器人的动作,实现动作状态的存储或打印。
螺旋轮式微型管道机器人控制系统的软件采用C语言与Visual Basic混合编程技术,下层控制程序用C语言编制,上层界面用Visual Basic编制。整个软件主要包括:初始化模块、动作扫描模块和定时中断模块。初始化模块完成输出端口、D/A转换器等的初始化;动作扫描模块扫描上位机指令,并执行相应操作;定时中断模块接收报警和急停等信息。其程序框图如图4所示。
螺旋轮式管道机器人管内检测水平的高低是管道作业的关键。螺旋轮式管道机器人控制系统,是上位机和下位机及管道机器人交互的关键。控制系统开发过程中,注重从可靠性、工程性以及推广应用性的角度出发,具有较高的可靠性和较大的推广应用价值。
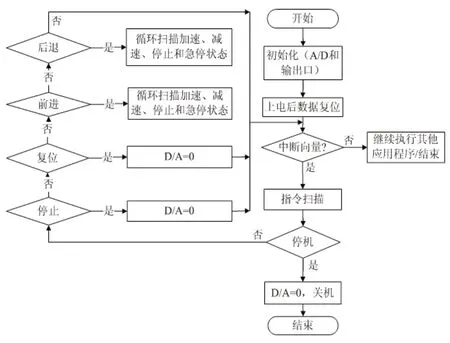
图4 螺旋轮式小型管道机器人驱动控制系统流程图
4 结论
螺旋轮式管道机器人控制系统实现了机器人和上位计算机之间的数据采集和无线传输。螺旋轮式微型管道机器人可以自如地实现前进、后退、调速等功能。并可以自动适应管径的微小变化,速度快、稳定性高。其位移信号,通过搭载在机器人本体上的智能传感器DSTJ-3000,经信号处理模块,传输到单片机,单片机C8051F330分析并处理接收到的信号,通过蓝牙模块与上位计算机进行通讯。上位机可以检测、控制、打印、显示动作信号。主界面上的控制信号,再通过蓝牙模块写入C8051F330,简单控制管道机器人的动作。在实验室进行了一次螺旋轮式管道机器人的爬行实验,管径范围为58mm~62mm。实验结果均达到且部分超过了所要求的技术指标,系统运行稳定。
[1]孙立宁,刘品宽,吴善强,等.管内移动微型机器人研究与发展现状[J].光学精密工程,2003,11(4):326-332.
[2]徐从启,解旭辉,戴一帆.新型微小管道机器人驱动特性分析[J].国防科技大学学报,2010,32(1),152-158.
[3]李鹏,马书根,李斌,等.具有自适应能力管道机器人的设计与运动分析[J].机械工程学报,2009,45(1):154-161.
[4]罗自荣,尚建忠,郭瑜,等.螺旋推进管道机器人的驱动头与保持架调节机构设计[J].机械设计,2009,26(8):41-43.
[5]何孟珂,周浩敏,郝欣.基于FPGA的硅谐振压力微传感器数字闭环系统设计[J].现代电子技术,2008,31(13):150-153.
[6]余德忠.微细管道机器人工作原理分析及参数优化[J].机床与液压,2011,39(7):77-81.
[7]Wang Y.X.,Su J.B.Movability of the tracked pipelinerobot based on hierarchical fuzzy control.High Technology Letters.2001,17(2):166-172
[8]Li Y.,Yang X.D.,Chen H.Dynamics model and feedback control of tracked robots[J].Journal of Tsinghua University(Science and Technology),2006,46(8):1377-1380.
[9]Zhang Y.S.,Ning L.W.New kind of wireless micro robot actuated and controlled through outside magnetic field[J].Chinese Journal of Mechanical Engineering,,2004,17(2):215-218.
[10]Yang Z.X.,Sun B.Y..Research on an inertial piezoelectric actuator for a micro in-pipe robot[J].Journal of Harbin Institute of Technology(New Series),2006,13(4):473-476.
