双工业机器人协同跟随运动研究
2014-12-18李勋
李 勋
(安徽埃夫特智能装备有限公司,芜湖 241007)
0 引言
近年来,中国制造业面临着向高端转变,工业机器人的应用越来越广泛,随着工业机器人技术的发展,机器人的能力不断提高,机器人的应用领域和范围也在不断扩展,但是对于一些复杂的任务,单个机器人已不能很好的满足任务的要求,而由两个或多个机器人组成的系统变成了理想的选择。
本文研究的是两个六自由度工业机器人的协同跟随,不仅对协同跟随原理进行了详细的分析,还通过对机器人D-H参数、工具坐标系以及两机器人的相对位置进行了标定,从而实现了双机器人的协同跟随运动。机器人的D-H参数标定是另外一个课题,本文未做深入讨论。本文所应用的机器人是由安徽埃夫特智能装备有限公司生产的ER3-C10六自由度工业机器人。
1 坐标系转换分析
工业机器人的坐标系一般有四种,关节坐标系,世界坐标系,工具坐标系,用户坐标系。用户坐标系也叫工件坐标系,其意义是用户可以设置自定义原点和方向的坐标系,来满足应用的需求,用户坐标系的方向定义同世界坐标系一样满足右手法则。用户坐标系设置完成并激活后,机器人示教时记录的点的数值就是在用户坐标系下的值。如果可以做到实时改变用户坐标系原点的值,那么在用户坐标系基础上示教的所有程序就会随着原点位置的改变而相应改变,同时保持与用户坐标系原点的对应关系。
对于两台机器人来说,只要将第一台机器人的TCP点作为第二台机器人的用户坐标系原点,就可以实现第二台机器人相对于第一台机器人的TCP进行跟随运动。这就需要计算出第一台机器人TCP点的物理位置在第二台机器人世界坐标系下的值。这就需要对两台机器人的坐标系转换关系进行标定。
设定M、N两个机器人,实现N机器人跟随M机器人运动,或者相对于M机器人的TCP点保持相对运动。M机器人的基坐标原点为OM,N机器人的基坐标原点为ON。

图1 两台机器人的位置关系
假设两台机器人的TCP点都为P点,位置和姿态相同,则有:


因此:

2 相对位置标定方法
根据上述理论分析,首先要做的就是将两台机器人TCP点同时对准空间一个P点,两台机器人在P点时的物理位置和物理姿态要完全相同。通过手动机器人来完成这项任务是很困难的一件事,实际上根本无法操作,本文采用将两台机器人在零点位置时,通过FARO激光跟踪仪标定出一些参数,再手动分别设置两台机器人工具参数来实现对准空间虚拟一点。
本文采用的是两台ER3-C10型机器人,并安装在同一平面上进行标定测试。
设定M机器人的工具参数为(TXM,TYM,TZM,TAM,TBM,TCM),N机器人的工具参数为(TXN,TYN,TZN,TAN,TBN,TCN)。
步骤:
1)将两台机器人都运动至零点位置,记录两台机器人的世界坐标系值,分别为(XM,YM,ZM,AM,BM,CM)和(XN,YN,ZN,AN,BN,CN);
2)仅运动2轴,利用激光跟踪仪分别采集出围绕2轴转动的圆,分别命名为:圆2轴_M,圆2轴_N;
3)仅运动1轴,利用激光跟踪仪分别采集出围绕1轴转动的圆,分别命名为:圆1轴_M,圆1轴_N;
4)构造平面平行于圆2轴_M,且经过圆1轴_M的圆心点,命名为:平面1;
5)构造平面平行于圆2轴_N,且经过圆1轴_N的圆心点,命名为:平面2;
6)测量平面1与平面2之间的夹角,命名为:角度1;
7)若角度1 接近于0,说明两平面平行,机器人为相对安装,测量圆1轴_M的中心点法线与圆1轴_N的中心点法线的距离,命名为L;

8)若角度1>0,构造直线为平面1与平面2的交线,命名为:直线1;
9)测量圆1轴_M的圆心点到直线1的距离,圆1轴_N的圆心点到直线1的距离,分别命名为:L1,L2;

11)设定TAM,TBM,TCM为0,根据姿态欧拉角的旋转方式,将M机器人的姿态绕相应的轴旋转角度为180°或者角度1,计算TAN,TBN,TCN的值;
12)工具参数测量完成,分别填入M、N机器人。
若机器人不是安装在同一平面,或者机器人型号不同,可通过测量各平面之间的距离,来设定TXM,TYM,TXN,TYN。
3 实验验证
根据上述理论分析,将两台ER3-C10机器人相对安装,并根据上述标定方法进行标定,标定结果为:

将两个工具坐标系分别填入M、N机器人,并加载。添加原理分析的代码至控制器底层代码中后,编写示教程序。
M机器人的程序为:


N机器人的程序为:
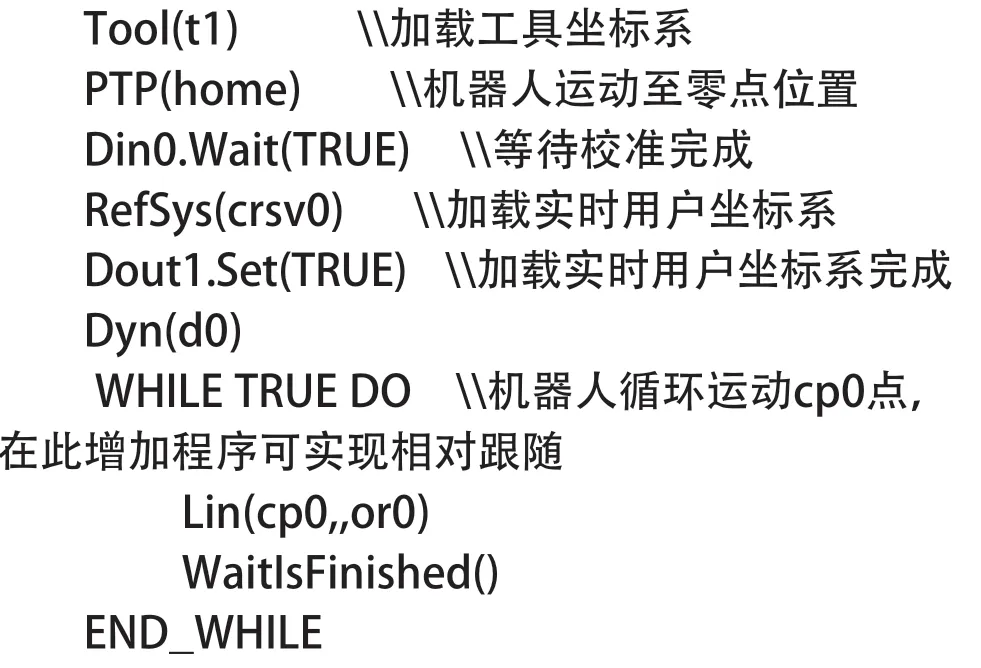
上述程序先运行N机器人程序,再运行M机器人程序,结果实现两机器人的协同跟随运动。
4 结束语
本文通过公示推导、理论分析到实验验证,实现了两机器人的协同跟随运动。值得一提的是,这种方法不仅仅适用于两台机器人,还可以实现多个机器人之间的协同跟随。原理是相同的,关键解决多机器人之间的相对位置标定问题。同时要注意,机器人控制器的CPU运算能力问题,因为实时用户坐标系的运算必须在单个插补周期内完成,否则控制器会报出跟随误差超限的警告,因此需要选择主频较高的控制器。
[1]焦国太,冯永和,王锋,等.多因素影响下的机器人综合位姿误差分析方法[J].应用基础与工程科学学报,2004,12(4):435-442.
[2]宋月娥,吴林,田劲松,等.用于机器人离线编程的工件标定算法研究[J].哈尔滨工业大学学报,2002,34(6):735-738.
[3]叶声华,王一,任永杰,等.基于激光跟踪仪的机器人运动学参数标定方法[J].天津大学学报,2007,40(2):203-205.
[4]Xiaolin Zhong,John M.Lewis,Francis L.N.Nagy.Autonomous robot calibrationusing a trigger probe[J].Robotics and Autonomous systems,1996,18:395-410.
[5]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,1996.
[6]M.Abderrahim,A.R.Whittaker.Kinematic model.Identification of industrial manipulator[J].Robotics and computer integrated manufacturing,2000,16:1-8.
