基于五自由度操作臂的高压线作业的策略与实现
2014-12-18吴品弘苏满佳刘兴君
张 峰,郭 锐,吴品弘,苏满佳,刘兴君
(1.国网山东省电力公司电力科学研究院,济南 250101;2.山东鲁能智能技术有限公司,济南 250101;3.广东工业大学机电工程学院,广东 510000)
0 引言
随着科学技术的发展以及人们生活水平的不断提高,人们对用电量的需求也越来越高,随之而来的是对高压线的要求更加苛刻,高压线的铺设逐渐普及,总长度不断增加,高压线上检测和维护工作日益增加。这些工作繁琐、工作量大、单一、危险,使得人们迫切需要机器人作为人的替代来完成这些工作。而就高压线机器人本身来说,需要具有完成沿高压线移动和在高压线上完成巡检以及维护这两个功能,与这两项功能相对应的也就是一个巡检平台和安装在平台上的操作臂。
在过去的一段时间里,人们对高压线巡检以及日常维护作业做了广泛的研究,同时也设计出了一些具有代表意义的机器人来代替人类完成复杂危险的高压线作业。根据运动方式的不同,有些机器人缠绕在线缆上[1~4],而有些则通过几个臂悬挂在线缆上[5,6]。它们基本上都能够通过轮子在线缆上完成连续的直线运动,当然有小部分机器人能够检测出线缆上的障碍物和分离的线缆并通过臂完成跨越。不管机器人采用何种运动方式,越障都是其必不可少的一个功能,不少学者也对高压线越障功能做了研究[4,7]。然而,高压线机器人最主要的工作还应当是对操作臂的设计和研究。
高压线机器人除了实现巡检作业之外,更多的是完成线缆的日常维护作业。通常这些维护作业包含了除冰作业[8,9]、清除导线悬挂异物、修补导线、拆卸防震锤、拆卸弹簧销等。虽然上述五项作业是高压线日常维护时经常出现的,但目前除了除冰作业外还没有利用高压线机器人来实现任务的研究。
这几项任务的完成需要较为复杂的运动,则必须通过除了操作臂以外的特殊工具来实现,因此我们需要一个简易的巡线平台。为了简化操作系统、减小操作臂重量以及提高作业任务的完成效率,我们则需要一个较少自由度的操作臂。所以我们设计了一款悬挂式的高压线移动平台以及一个五自由度模块化操作臂[10]并通过主从控制来完成作业任务。本文首先对操作臂平台进行介绍,得到操作臂的可达工作空间,然后根据可达工作空间对上述四项作业完成策略进行分析,最后利用一系列实验验证作业策略的可行性。
1 操作臂以及高压线维护作业
1.1 操作臂平台
本文所涉及到的操作臂平台是一款基于模块化设计的五自由度操作臂平台,整个平台包含三种模块:I模块(回转模块)、T模块(摆转模块)以及G模块(末端执行器模块),根据直径尺寸大小的不同,I模块和T模块可分为I100、T85、I100、T85几种不同的类型,而操作臂平台则是由以上几种模块串联构成,操作臂构型为:

其中B表示基座,G85表示末端执行器,⊥和∥分别表示各相邻模块旋转轴之间的空间垂直和平行关系。其机器人构型如图1所示,I模块以及T模块所组成的模块化机器人平台整体设计以及控制方式参见文献[11],此处不做过多描述。

图1 操作臂构型示意图
操作臂末端的G模块是根据作业任务设计的,它的结构决定了四项任务的完成方式,本文所设计的末端执行器集四项作业于一身,具有一定的专用性,沿着G模块轴向上安装有一台摄像头以便于观测G模块末端运动情况,G模块的具体结构和功用将在第二节中详细阐述,具体结构如图2所示。

图2 末端执行器(G模块)
该操作臂利用主从控制进行驱动,主机器人与操作臂同构,也是采用模块化进行设计[12],构成主机器人的模块与操作臂模块一一对应,其构型与操作臂的相同。显然,利用主从控制有利于实现遥操作,而且操作简单形象,能够方便的实现作业,其具体的控制方式参见文献[13]。
1.2 高压线的四项维护作业
操作臂是在高压线环境下工作的,高压线日常维护作业环境如图3所示。高压线操作环境由四根高压线,间隔棒,防震锤,机器人平台,操作臂等组成,其日常维护作业主要是防止意外情况对高压线运行状况的影响,而造成其影响的主要原因则是其长期受到风、雨、雪等引起的动载荷[14],间隔棒和防震锤等则是减小这种危害的主要工具:间隔棒的主要用途是限制子导线之间的相对运动及在正常运行情况下保持分裂导线的几何形状,它共有四个端口,每个端口分别连接四分裂导线的一根导线;由于微风振动是导致输电线疲劳、最终形成断股的主要原因,严重影响电力系统的安全,利用防震锤锤头的惰性作用可以消耗风传给导线的振动能量,所以防震锤是固定在导线上用于消除线路自振以及消除风等引起的谐振[15]。机器人平台则安装在任意两根水平的导线上,可沿导线水平方向移动,操作臂固定在机器人平台上。

图3 高压线操作环境几何模型
作业内容主要包括清除导线悬挂异物、修补导线、拆卸防震锤、拆卸弹簧销,其中清除导线悬挂异物就是清除可能悬挂在导线上的风筝线以及塑料袋等;利用预绞丝在高压线断股导线处进行修补;拧下防震锤上的螺母实现防震锤的拆卸;拆除间隔棒上的弹簧销来拆卸间隔棒。其中预绞丝和防震锤如图4所示。

图4 预绞丝(左)和防震锤(右)
2 作业策略
2.1 工作空间的生成
分析操作臂完成四项作业的策略,首先需要分析的是其完成的可能性,也就是操作臂末端能否达到目标位置,这是最基本的可能性分析。换句话说也就是操作臂可达工作空间大小的确定,操作臂的可达工作空间就是操作臂至少能以一个方位到达的目标点的集合,即要求作业任务的工作点在操作臂的可达工作空间内。由于组成操作臂的几种模块具有一定的关节限位,于是操作臂的可达工作空间并不是一个完整的球体,具体的可达工作空间的求法有很多,为了得到比较精确的结果,我们利用解析法来求解,于是我们可以得到操作臂的可达工作空间[16],其剖视图如图5所示。

图5 高压线操作环境几何模型
从图5中可以看出,操作臂可达工作空间的上部是一个半径为883.5mm的球冠,其底部由于T模块关节位置限制的原因产生了几段圆弧且整个工作空间底部产生了些许空洞,由于在此类作业中操作臂末端不会到达空洞处,所以不会对作业造成影响。另一方面,由于操作臂固定在机器人平台上,而平台能够沿着导线方向移动,所以简单来说,本文所用的操作臂的工作范围已经完全覆盖了四根导线所存在的空间,通过一定的策略能够完成作业,也就是说,四项高压线作业可行。虽然操作臂的工作空间能够到达目标位置,但是末端姿态不一定能够符合要求,具体情况则需要在策略分析中考虑。
2.2 挂物的清除
清除导线悬挂异物的作业目标是清除导线上可能存在的风筝线,塑料袋等杂物,由于操作臂的工作空间很容易就能够达到作业点且该作业对操作臂末端姿态的要求不高,所以只要选取了较好的切割方式该作业就比较容易完成。
由于需要除去的是类似于风筝线,塑料袋等柔性物体,所以在切割过程中必需把异物拉直,否则它很容易缠绕在电机轴上导致切割失败。又由于末端夹持器尺寸大小的限制,我们不得不考虑一种类似于剪刀的切割方式,如图6所示,圆形锯片通过直流电机驱动,在圆形锯片平齐的地方有一个开有1.5mm厚的刀槽,当夹持器靠近异物时,夹子缓慢闭合并沿着导线方向移动,就像剪刀剪东西一样,由于异物在圆形铣刀和刀槽之间受到拉紧力,异物很容易就被切割下来。可以说,由于异物是柔性物体,所以对末端执行器的姿态要求不是很高,它只需在操作臂平面上运动即可。

图6 切割导线异物示意图(俯视)
2.3 电线的修补
高压输电线一般采用钢芯铝绞线,输电线路在巨大的交变张力作用下导致输电线产生裂纹、断股等缺陷,一旦离其他相线、地线或铁塔等的距离小于安全绝缘距离,会导致闪络等电力事故的发生。通常的修补方法是缠绕一根新的预绞丝到断裂的地方。显然,完成这项作业需要攻克两个难题,即如何固定预绞丝初始端以及如何较好的完成预绞丝缠绕动作。对于前者,由于操作臂是单手爪的,所以不能依靠手爪一直抓紧,于是我们在预绞丝的一端焊上了一个U型环(如图7所示),在操作过程中只需要将U型环扣死就可以固定住预绞丝的一端了;对于后者,由于缠绕动作要求操作臂在垂直于导线的方向上运动,且在这个方向上运动的障碍物太多(比如其余三根导线以及导线上的高压设备),且不同导线位置上的障碍物不同,运动规划相对比较复杂,因此在我们使用主从控制,它能够很好的实时监控从机器人(操作臂)的运动轨迹,并及时的做出调整,能够很好的解决此类问题。

图7 焊有U型环的预绞丝
2.4 防震锤的调整
从图4中可以看出,防震锤是通过一个螺栓固定在导线上,所以拆卸防震锤的作业其实就是拧下用于固定的螺母,由于螺栓的一头是正方形且与防震锤的被固定面配合,相当于一个扳手限制住了螺栓的运动,所以只需要在一头扭下螺母即可。和前一个作业一样,此项作业同样需要解决两个问题,即操作臂所能提供力矩的大小和五自由度操作臂末端执行器位姿问题。经过测量,拧下螺母所需提供的瞬时最大扭矩为40N·m,如果单单利用操作臂末端的I关节进行作业,虽然作业过程比较简单且容易操作,但是I关节无法提供足够大的力;另外,由于五自由度操作臂只能在操作臂平面上运动,且不像清除导线悬挂物作业一样,这项作业的对象是刚体,拧螺母的动作只能够在螺母平面上,所以说操作臂的工作平面与我们预期的作业平面之间存在一个夹角,显然,单单靠操作臂是无法完成此项作业。为了解决这两个问题,我们设计了一款扳手(如图8所示),扳手一端开有六角槽,而在另一端的把手顶部有一个半球,扳手两端中心长250mm,扳手上的半球可以与夹子上的圆柱槽配合形成一个类似于球铰的机构,也就是说扳手能够利用“球铰”关节在夹持器上端运动,且能够弥补作业平面与预期平面之间的夹角,使得操作臂能够在预期的平面上运动。于是,特制扳手不仅解决了操作臂提供力不足的问题,还解决了五自由度机器人末端执行器姿态问题。

图8 特制扳手三维图
2.5 开口销的拔除
弹簧销的作用是将间隔棒固定安装在导线上的,可以说拆卸弹簧销的目的就是为了拆卸间隔棒,由于弹簧销位于操作臂的工作空间内且拆卸过程运动方式简单,所以我们只需在末端执行器的顶部和端部开若干个圆柱销孔,当弹簧销圆环端头的法向与夹子开合方向垂直时,利用夹子顶端的作业销插入圆柱销圆环端,将之挑出即可(如图9所示)。
3 实验与分析
3.1 实验环境的搭建
实验的目的在于利用设计好的末端执行器检验能否根据上述内容所描述解决策略完成四项高压线作业,实验过程中通过主从控制来操控操作臂。在实验中利用与现实高压线同样粗细的不锈钢管代替导线,并将其固定在桁架上,由于导线两侧对称,我们只考虑其中一边,操作臂安放在与机器人平台等高的桌面上。
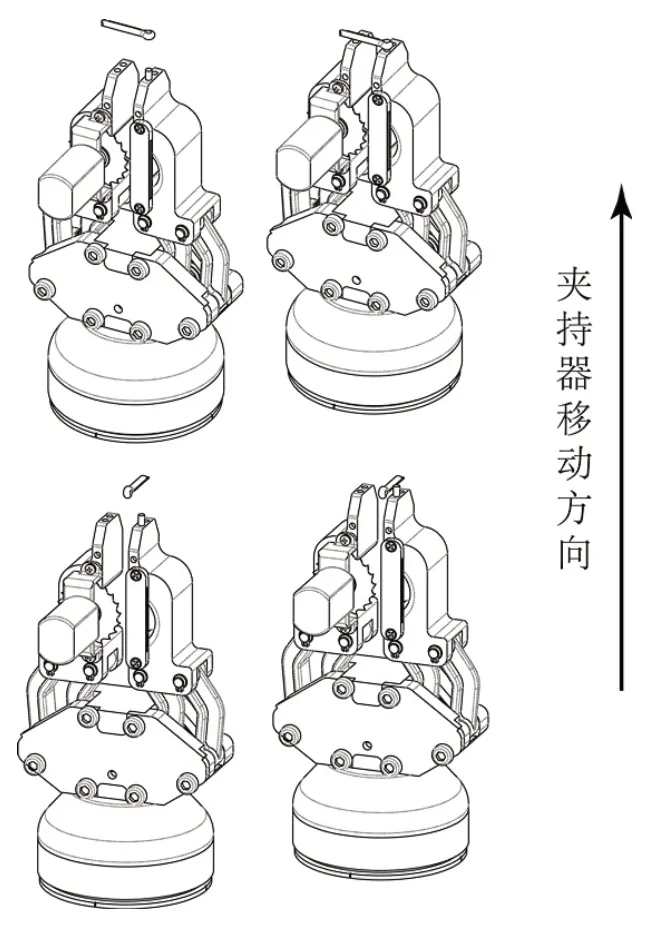
图9 拆卸弹簧销示意图
3.2 高压线作业实验
3.2.1 清除导线悬挂异物作业实验与分析
实验利用布来代替悬挂在导线上的异物,该作业完成需要经历以下三个步骤:1)将末端执行器移至异物附近,并将其调整至预期姿态;2)给驱动电机通电,使圆形铣刀高速旋转,并将末端执行器缓慢移近异物;3)末端执行器保持姿态沿直线方向移动切割异物。在整个切割过程中,夹持器张开一定距离,以圆形铣刀进入刀槽1/4为准。作业具体的操作过程如图10所示。

图10 清除导线悬挂异物实验操作过程
这项作业的完成是利用了异物在刀槽中受到圆形铣刀的拉扯以及切割来实现的,在整个过程中,只需保证末端执行器姿态保持水平即可,对精度速度等没有太大的要求,可以说是比较容易完成的一个项目。
3.2.2 修补导线作业实验与分析
修补导线作业主要是通过一个焊有U形环的预绞丝完成的,其需要经历以下三个步骤:1)用夹持器夹住U形环,使U形环的开口方向与末端执行器开合方向垂直;2)U形环开口向上套进导线,夹紧夹持器,使预绞丝一端固定在导线上;3)用夹持器夹住预绞丝另一头,在垂直于导线平面上做类似圆弧运动,使预绞丝逐步缠绕在导线上。在第1步中,U形环在夹持器上不掉下即可,尽量减小U形环的形变。作业具体的操作步骤如图11所示。

图11 修补导线实验操作过程
这项作业的难点在与在预绞丝一端固定后如何缠绕将其缠绕在导线上。
3.2.3 拆卸防震锤作业实验与分析
根据上一节所提到的,拆卸防震锤时需要用到特制扳手,利用特制扳手我们只需要在预期工作平面(即螺母所在平面)上运动若干个圆周即可,作业需要经历以下三个步骤:1)夹持器夹住扳手,将其六角孔对准螺母并套上;2)夹紧夹持器,使其圆柱孔与扳手末端半球形成球铰机构;3)控制操作臂运动,使扳手在预期工作平面上做圆周运动,逐步将螺母拧下。作业具体操作步骤如图12所示。
这项作业的难点主要在将扳手套在螺母上,由于利用的是主从控制,且主机器人这边的位置变化会按照一定比例在从机器人即操作臂上重现,所以在精确定位上会比较耗时,使得整个工作效率降低,这是该系统存在的一个误差问题,在每个实验过程中都有相应的体现[17]。
3.2.4 拆卸弹簧销作业实验与分析
拆卸弹簧销这项作业可以说是几项作业中运动方式、完成策略最简单的,只需将置于夹持器末端的圆柱销伸入弹簧销孔内挑出即可。作业具体操作步骤如图13所示。
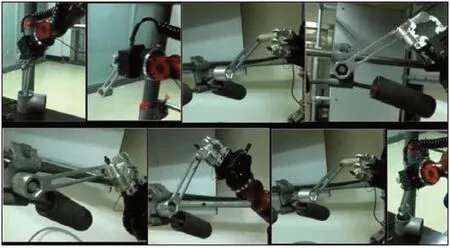
图12 拆卸防震锤实验操作过程[13]

图13 拆卸弹簧销实验操作过程[13]
和上一项作业一样,这项作业的难度在于对弹簧销孔的精确定位,这是我们这个系统存在的普遍问题。
4 结束语
本文提到的高压线四项作业(清除导线悬挂异物、修补导线、拆卸防震锤以及拆卸弹簧销)是高压线日常维护中经常出现的,对高压线的日常维护工作十分重要。本文提出的一款基于操作臂的多功能夹持器,夹持器实现了功能的集成,能够很好的完成这四项作业,而不是单一的完成其中某项。操作臂通过主从控制,实现遥操作,并且具有一定的实时性,进行作业时比较直观。
本文首先对作业完成的可能性进行了分析,然后重点提出了实现四项作业的解决策略,构建了完成作业的理论体系,最后通过实验进行验证,实验结果表明,操作臂能够较好的完成作业,达到作业所需的要求。但在实验中出现了主从控制精度与速度不能同时保证的矛盾,以及五自由度操作臂末端执行器位姿很难达到理想状态实现理想轨迹的问题。下一步工作将以此为基础,优化控制系统结构,并通过机器人运动学解决末端执行器位姿问题。
[1]H.Nakamura,T.Shimada,and H.Kobayashi.An inspection robot for feeder cables -basic structure and control[J].In Proc.of the International Conference on Industrial Electronics,Control and Instrumentation,1992:849-852.
[2]H.Kobayashi,H.Nakamura,and T.Shimada.An inspection robot for feeder cables -snake like motion control.In Proc[J].of the International Conference on Industrial Electronics,Control and Instrumentation,1991:882-992.
[3]S.Peungsungwal,B.Pungsiri,K.Chamnongthai K,and et al.Autonomous robot for a power transmission line inspection[J].In Proc.of 2001 IEEE International Symposium on Circuits and Systems,2001:121-124.
[4]J.Sawada,K.Kusumoto,and T.Munakata.A mobile robot for inspection of power transmission lines[J].IEEE Transactions on Power Delivery,1991,6(1):309-315.
[5]王鲁单,王洪光,房立金,等.一种输电线路巡检机器人,控制系统的设计与实现[J].机器人,2007,29(1):7-11.
[6]Fengyu Zhou,Aiguo Wu,and Yibin Li.Development of a mobile for inspection of high voltage overhead power transmission lines[J].Automation of Electric Power Systems (in Chinese),2004,28(23):89-91.
[7]L.Wang and F.Liu et al.Development of a novel power transmission line inspection robot[J].In Proc.of 2010 International Conference on Applied Robotics for the Power Industry,2010.
[8]S.Montambault,J.Cote,and M.St.Louis.Preliminary results on the development of a tele-operated compact trolley for live-line working.In Proc.of 2000 IEEE International Conference on Transmission and Distribution Construction,Operation and Live-line Maintenance,2000,21-27.
[9]S.Montambault and N.Pouliot.The hq linerover: Contributing to innovation in transmission line maintenance.In Proc.of 2003 IEEE International Conference on Transmission and Distribution Construction,Operation and Live-line Maintenance,2003:33-40.
[10]Y.Guan,L.Jiang,X.Zhang,H.Zhang,and X.Zhou.Development of novel robots with modular methodology.In Proc.of IEEE/RSJ Int.Conf.on Intelligent Robots and Systems,2009:2385-2390.
[11]周雪峰,江励,朱海飞,等.一个模块化机器人平台的设计[J].华南理工大学学报(自然科学版),2011,39(4):50-55.
[12]郑志芳.模块化主机器人的研制[D].广州:华南理工大学机械与汽车工程学院,2013:12-25.
[13]Z.Zheng,Y.Guan,M.Su,et al.Development of Isomor-phic Master-Slave Robots with Modular Method[A].P-roceeding of the IEEE International Conference on In-formation and Automation.Yinchuan,China[C].2013:1290-1295.
[14]王煦.钢芯铝绞(ACSR)架空导线微动疲劳及其运动状态评估[D].安徽:合肥工业大学,2012.
[15]金立军,闫书佳,刘源.基于类Haar特征与级联AdaBoost算法的防震锤识别[J].系统仿真学报,2012,24(9):1-4.
[16]范守文,徐礼钜.机器人工作空间分析的解析法[A].第十四届全国机构学学术研讨会暨第二届海峡两岸机构学术交流会[C].2004:194-199.
[17]M.Su,Y.Guan,J.Hu.et al.Development and Analysis of A Bilateral Control System for Modular Master-Save Robots with P-P Tracking Capability[A].Proceedings of 2013 IEEE International Conference on Mechatronics and Automation.Takamatsu,Japan[C].2013:336-341.
