自适应液压工程夹持器控制系统的设计
2014-12-18王恒冲王守城石晓慧
王恒冲,王守城,石晓慧
(青岛科技大学 机电学院,青岛 266061)
0 引言
液压挖掘机在施工过程中遇到大质量装卸、安装、转移等问题时多采用带吊钩的铲斗进行吊装。但这种方式对所吊装物体的形状和位置有一定的要求,为此设计了自适应液压工程夹持器。夹持器上滑移检测系统的安装使得夹持器自动调节夹紧力得以实现,最终以合适的力对物体快速精准夹持。自动化技术在液压方面正变得无处不在,两者的结合正逐步趋于完善。
自适应液压工程夹持器的控制系统负责采集系统数据,进行数据处理,并输出控制量以驱动各种元件动作,从而完成夹持器的不同功能。其中控制系统的主要控制对象是自适应夹紧力。控制系统通过比例调压阀进行压力控制,PLC将相应的控制指令发送给比例调压阀,通过电液比例控制技术将电信号转化成调压阀的调定压力,从而完成对夹持回路压力的实时控制。
1 液压系统设计
自适应液压工程夹持器通过其液压系统驱动机械结构运动,控制夹持力的大小,从而实现对不同物体的自适应夹持。液压马达可以方便地控制腕部转动机构转动的角度和快慢,且能够提供较大的转矩,转动平稳,能够方便地实现锁定,保证夹持的稳定。通过液压缸活塞杆的伸缩,带动弯杆绕销轴进行转动,实现对物体的夹紧。在供油压力一定的情况下,若需要调节夹持器的夹紧力,则需要相应的调节夹持机构液压回路的压力,采用的基本回路为减压回路。自适应液压工程夹持器要实现的设计功能是在工作过程中,自动根据物体的表面状况和质量,调节夹紧力。当夹持过程出现滑移时,夹持机构的液压回路能够自动增大系统压力,这个过程是连续的,采用电液比例减压阀作为主要控制阀,用它对夹持机构液压回路进行压力的无级调定。自适应液压工程夹持器腕部转动机构的执行元件为液压马达,通过具有O型中位机能的三位四通电磁换向阀控制其正反转动。机构的转动速度分为快慢速两种,通过二位二通电磁换向阀进行转换。利用挖掘机液压管路进行供油的液压系统原理图如图1所示。
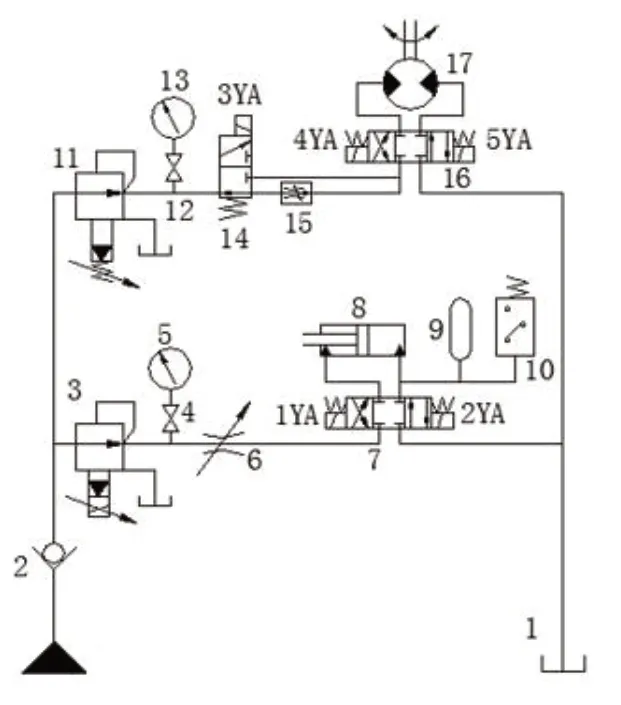
图1 夹持器液压系统原理
2 夹持机构控制过程
要实现自适应液压工程夹持器的自适应控制,需要确定自适应机制,选择合理的反馈信号,并进行自适应判断,同时能够根据判断信号,按照一定的规则进行自适应调整。其中夹持机构控制系统的主要功能就是自适应调整。该控制系统的类型属于压力控制,通过电液比例控制技术调节液压回路的压力,在自适应液压工程夹持器的夹持阶段,控制系统根据反馈信号,以一定的分辨率调整夹持回路压力的大小,保证所夹持的物体不滑落,夹持机构自适应控制流程图如图3所示,其控制过程为:
1)快速阶段,液压回路的压力较低,此时减压阀阀口处于完全打开状态,油液全部流入液压缸,夹持平板快速运动。
2)预加载阶段,夹持平板接触被夹持物体,回路压力开始升高,当回路压力达到设定的预加载压力时,减压阀的阀芯处于关闭状态,油液不进入液压缸。
3)自适应阶段,控制系统根据设定的分辨率,在夹持过程出现滑移时,增加夹持机构液压回路的调定压力。PLC对电液比例调压阀进行控制,调整其输出压力。其压力增加的幅度需要根据系统的响应速度和材料的抗压程度来定,既要保证自适应调整次数相对较少,又要避免夹持力过大超出所需值,造成被夹持物体的损坏,压力上限由操作人员根据夹持作业的具体情况,进行人工设置。
4)夹持阶段,执行液压缸处于静止状态,减压阀的阀口完全关闭,卸荷阀打开,液压泵处于空载状态。此时换向阀的阀口封闭,执行液压缸的工作压力维持在设定压力附近,当回路压力因为泄露或因被加持物体姿态改变而下降时,蓄能器释放储存的压力能,以维持回路压力。当压力持续下降,压差达到设定值时,换向阀打开,卸荷阀关闭,调压阀重新给调压回路进行补油,其压力变化过程如图2所示。
5)卸载阶段,PLC发出数字控制指令,操作换向阀进行换向,液压缸反向运动,松开被夹持物体。张开到合适角度后,操作人员控制PLC发出指令,使得换向阀进入中位工作,液压缸被锁定。同时,卸荷阀打开,液压泵处于卸荷待命状态。
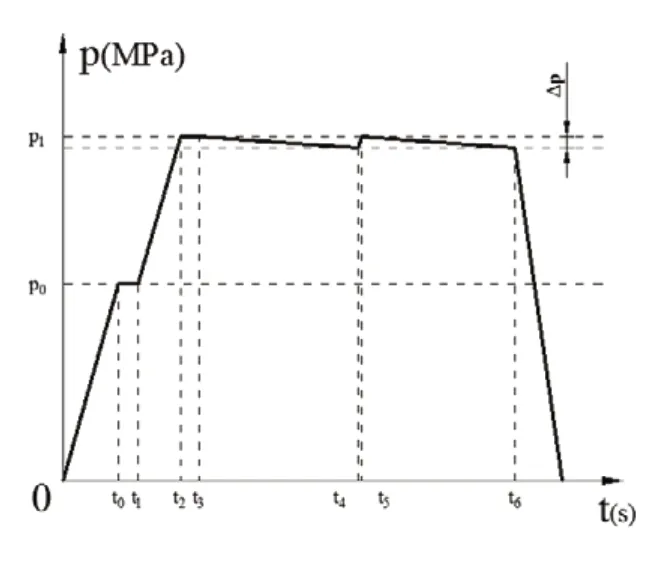
图2 夹持阶段压力变化
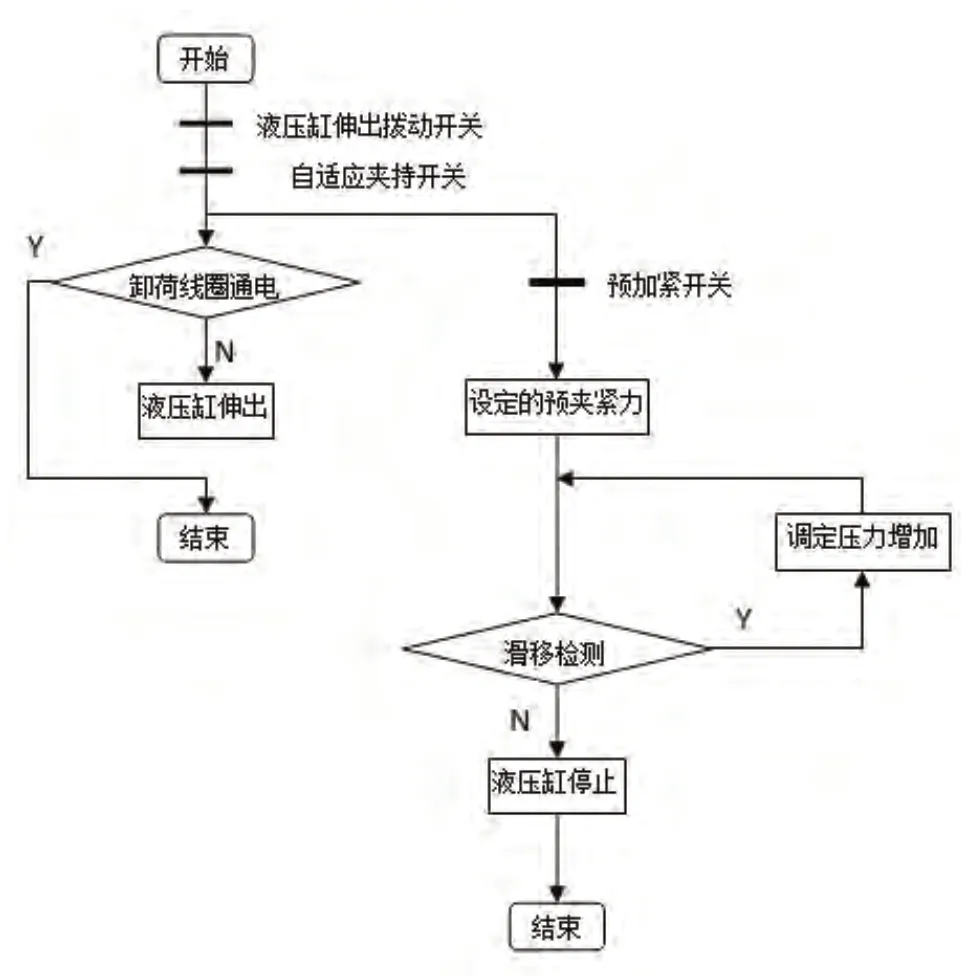
图3 夹持机构自适应控制流程图
3 滑移检测系统
液压工程夹持器的自适应控制是以被加持物体是否发生滑移为判断依据的,是建立在滑移量检测的基础之上。滑移检测系统的功能是检测夹持器在夹持过程中,被加持物体是否发生滑移,并将检测信号经上位机传递到PLC里,作为PLC进行自适应控制的依据。根据夹持器在工作过程中与被夹持物体接触力大、磨损严重,作业环境恶劣的特点,提出了利用光电位移传感器的非接触式滑移检测方法。这种滑移检测系统利用光电传感器作为测量元件,工作时传感器发出光电信号,经被加持物体表面的反射,返回到传感器的接收窗口,接收窗口通过解码,从而判断夹持平板和被加持物体是否有相对滑动。
3.1 信号的传递过程
滑移检测系统由光学传感器芯片、上位机程序和OPC服务器三部分组成。如图4所示,光学传感器芯片检测被夹持物体的滑移量,然后对信号进行处理。处理之后的信号按照一定的通信格式,将数据包传递给上位机。上位机程序对检测信号进行处理,利用相应的编程语句,将传感器的位移数据转化为布尔数字开关量,并通过通用接口,将布尔型数据赋值到OPC服务器中的相应变量上。最终通过OPC技术,OPC服务器将变量值传递到PLC上相应的存储器中,完成滑移检测信号的传递。

图4 滑移信号的传递
3.2 滑移检测系统的硬件连接
根据滑移信号的传递过程,绘制如图5所示的硬件连接示意图,其中光学传感器通过RS-232C串口与上位机进行连接,上位机则通过RS-485接口利用PPI协议进行通信。

图5 滑移系统硬件连接
3.3 OPC服务器设置
利用KEPServerEX软件可以建立OPC服务器与PLC之间的通信连接,在软件中添加通道和新设备,选择通信驱动为S7-200。之后在新添加的设备中定义滑移信号的传递变量,并设置其在PLC中的存储地址为M0.0,数据类型为布尔逻辑型,其值对应于中间继电器的通断。变量设置完成之后,可以用KEPware中的Quick Client程序进行通信的检测和连接。
3.4 滑移检测程序设计
滑移检测程序是上位机程序的一部分,其功能是按照设定的语句,对位置传感器传入的数据进行响应,使得当滑移量产生时,触发程序事件,从而改变相应变量的布尔逻辑值。自适应液压工程夹持器的上位机程序采用Visual Basic进行编程。要想利用上位机程序改变OPC服务器中变量的值,首先必须建立二者之间的通信连接。利用OPC技术所提供的数据接口,VB程序能够通过代码建立与OPC服务器软件的连接,进而完成数据的读写和写入。利用Visual Basic的事件驱动编程机制,对MouseMove事件进行编程,就可以方便的实现滑移检测的这一功能。当位移传感器检测到滑移信号后,触发MouseMove事件,程序执行该事件中的代码。同时为了防止鼠标点移动到窗口外影响事件触发,需要设置代码在MouseMove事件触发后,将鼠标点移回原位。滑移检测程序的编制如图6所示,首先要在通用段定义Function过程,以及鼠标点的坐标变量X和Y。之后在窗口的MouseMove事件中编写代码,使得事件触发后,对布尔变量m进行赋值,之后将鼠标点移回(300,500)点上。

图6 滑移检测程序段
4 结束语
控制系统是自适应液压工程夹持器的大脑,通过电液比例控制技术完成对系统的压力控制,通过PLC技术实现顺序动作、逻辑和计算。经调试表明,该控制系统实现了自适应液压工程夹持器的控制功能,最终使夹持器的执行部件有序地完成相应的功能。滑移检测系统克服了机器人技术中膜片压电传感器易磨损、信号处理复杂的缺点。滑移信号是通过光电位移传感器直接检测到的,并通过VB程序的事件响应机制进行响应。滑移检测系统与PLC之间通过OPC服务器进行连接,这种方式大大简化了设备与上位机程序之间的连接过程,提高了设计效率。另外,采用OPC技术进行连接,使得滑移检测系统相对独立,可以与不同PLC系统进行连接,提高了程序的兼容性。
[1]王守城,容一鸣.液压与气压传动[M].北京:北京大学出版社,2008.4.
[2]刘炳文.Visual Basic程序设计教程[M].北京:清华大学出版,2004.3.
[3]王牛,田强,丘柳东,等.基于力反馈的夹持器系统模型[J].机器人,2011,33(4):475-481.
[4]L.Plonecki,W.Trampczynski,J.Cendrowicz,A Concept of Digital Control System to Assist the Operator of Hydraulic excavators.Automation in Construction,1998,7:401-411.
[5]刘恒大,忽满利,单鹏.基于labVIEW的鼠标位移测量技术研究[J].计算机测量与控制,2010,18(12):2724-2726.
[6]蒋健.基于OPC数据通讯技术的实时监控系统研究与应用[D].东南大学,2006.
[7]D.Osswald,H.Worn.Mechanical System and Control System of a Dexterous Robot Hand[A].Proceedings of the IEEE-RAS International Conference on Humanoid Robots[C].Tokyo,Japan.2001:407-414.
