舰船动力系统模块化建模方法
2014-12-07胡锦晖胡大斌何其伟
胡锦晖,胡大斌,何其伟
(海军工程大学,湖北 武汉430033)
0 引 言
在舰船动力系统仿真研究中,传统的建模方法常采用高级程序语言(例如Basic,Pascal,C ++)编写动力系统各设备的模型,模型结构固定,缺乏通用性,模型的适应性并不好。由于程序的可重用性差,导致代码资源不能很好地共享,与现代软件开发所遵循的理念不符。
模块化的思想逐渐融入到建模仿真过程中:即采用某种规则把被研究系统分为不同的子系统,以模型模块的形式表示每一个子系统,并按照子系统之间的构建关系将这些模块连接起来,从而组合为被研究系统的仿真模型。这种思想可称之为“模块化建模”。
现代舰船的动力系统尽管设备种类繁多、技术复杂、规模庞大,但从其设备的工作原理来讲存在着诸多类似的部件。例如,各种类型的推进电机在原理上基本一致,只是它们在特征参数等指标上有所不同。
在舰船动力系统的仿真研究过程中,可针对不同的子系统分别建立典型模块的数学模型,然后将这些模型组合起来,以建立整个系统的数学模型。本文通过对模块的分类、模块间关系处理等模块化建模方法的研究,实现了包含某型舰船动力系统主要模块的模型库设计,从而达到提高模型可重用性的目的。
1 动力系统模块化建模方法
1.1 模块化建模的准则
模块化建模的基本原则为:采用标准化的规则建立子系统或部件的数学模型,再将该模型转化为计算机子程序,作为基本的建模模块,然后按照模块之间的连接关系将它们组合成各种不同的系统仿真模型。模块化建模还需满足以下准则:
1)模型模块相互间独立,可单独用于对某种设备进行仿真,又可参与更大系统的仿真;
2)基本的模型模块构成系统的仿真模型,它们是组成整个系统的基本元素;
3)应保证各个模型模块之间连接关系、命名、输入输出变量等规范化;
4)以各物理设备进行模型模块的划分,如舰船动力划分为推进电机模块、发电机模块等。
1.2 模块的分类
根据舰船动力系统的特点,可将其划分为众多子系统,通过对子系统的分析可将模块分为设备模块、逻辑控制模块和功能模块3 部分。
1)设备模块。设备模块可描述动力系统中各个设备的物理特性,其数学方程反映了其动态特性。同时,需要在设备模块中考虑预留模拟故障的变量。
2)逻辑控制模块。由于动力系统的操作使用中存在着大量控制、自动保护、报警等逻辑过程,在模型中需要编制相应的逻辑控制模块。例如,在舰船动力系统中,推进电机的启停、反转等逻辑控制过程。
3)功能模块。完成某种独立功能的子系统或设备的模型可以将其定为功能模块。这类模块有较为实际的意义,例如柴油机调速系统、增压器系统等,可表征一个子系统的动稳态特性,完成某项功能。
1.3 模块的分解
舰船动力系统的模块化建模研究首先是对动力系统进行合理的模块化分解,分解过程中应保证模块间的物理、数学独立性。合理地进行模型分解有利于建模和后期的模型修改。
在对舰船动力系统进行模块化分解过程中,根据系统的物理边界,逐步分拆划分子系统,从系统到子系统,再到设备,最后分为部件,形成层次分明的层级结构,如图1所示。

图1 动力系统的建模层次Fig.1 Modeling hierarchy of power system
本文中,某型舰船动力系统的分层模块化模型可用图2 表示。第1 层次是整个系统的模型,由对应于各个子系统的子模型组成,如本文所研究的动力系统模型由原动机、发电机系统、推进电机系统等子模型组成;第2 层次是各个子系统由其对应于各个设备的模块组成,反映子系统的结构,如推进系统由推进电机、离合器、轴系等组成;第3 层次是部件模型,如柴油机由本体、增压器、调速器等组成。

图2 舰船动力系统的分层模块Fig.2 Hierarchical modules of the warship's power system
2 基于模块化的动力系统模型库的建立
某型舰船动力系统的基本工作原理是:柴油机作为原动机带动发电机工作,在不同工况下工作,直接给推进电机和其他设备供电,或给蓄电池充电;推进电机产生扭矩,并通过轴系带动螺旋桨旋转;同时螺旋桨产生推力,通过推力轴承推动舰船向前运动。螺旋桨产生的推力与艇体阻力的不平衡,导致舰船航速的变化。推进电机产生的扭矩与推进轴系的损失扭矩、螺旋桨扭矩的不平衡,导致轴系转速的变化。
2.1 柴油机系统模块
根据柴油机的构成及工作原理,将其分解为如图3所示的模块化分解图。

图3 柴油机模块化分解图Fig.3 Block diagram of diesel engine modules
在柴油机系统模块中,可将其分为调速器模块、喷油泵模块、柴油机本体模块、涡轮增压器模块、进气管和排气管模块等子模块。由于以上模块运行机理均较为明确,且设计参数已知或测量较为便利,各种模块的数学模型均可采用机理建模法。可通过模块的过程机理、物理规律、参数方程直接列出其动态数学方程。例如,机械液压式调速器可采用简化的模型:

其中k和τ0为和调速器特性相关的常数。
喷油泵每循环有效喷油量g与循环供油量gc的传递函数模型为:

其中,τ为喷油泵的时间常数。
2.2 发电机模块
该型舰船发电机为单电枢、单换向器、直流发电机,通过控制面板上的励磁转换开关可以选择采用他励或自励的方式进行励磁,采用改变励磁电流的方式进行输出电压的调节。发电机的建模与励磁方式有关,模型由于励磁方式的不同而略有差别。
当励磁系统工作在他励方式时,其数学模型可用下式表示:

式中:J′为发电机轴系转动惯量;ω′为发电机轴系角速度;M′e为发电机电磁扭矩;M′f为柴油发电机组轴系上的扭矩损失。
当励磁系统工作在自励方式时,励磁回路不需要蓄电池的供电。由于发电机存在剩磁,电枢端电压将逐渐升高,最终建立电枢端电压。
2.3 推进电机模块
本文研究的动力系统中所有推进电机均为直流电机,其基本工作原理一致,只是电机的特征参数不同,采用双电枢、他励直流电机,通过改变电枢连接方式(串联或并联)以及调节励磁电流的方法进行调速,推进电机还可工作于两组蓄电池串联的工况下,但电机的持续工作时间受到限制;考虑到仿真的有效性和实时性,对推进电机进行建模时可以考虑进行一些简化。直流推进电机仿真框图如图4所示。

图4 直流推进电机仿真框图Fig.4 Simulation block diagram of the DC propulsion moto
忽略电枢回路的自感电势、电枢反应、互感等因素,直接传动的单电枢直流推进电机运行时满足以下方程:

式中:J为电机轴系转动惯量;ω为轴系角速度;Me为电枢电磁扭矩;Mp为螺旋桨的阻力矩;Mf为推进系统总的扭矩损失。
2.4 螺旋桨、船体模块
舰船推进系统模型中的船体、推进电机和螺旋桨3个部分共同组成船机桨系统,在这个系统中,仅考虑推进装置的回转部分运动和舰船的直线运动2 种运动,它们相应的动力学方程为:

式中:m为船体的总质量,kg;kw为附水系数;vs为舰船航速,m/s;Z为同时工作的螺旋桨数;Pe为螺旋桨的有效推力;RT为船体阻力。
螺旋桨与船体模块分解图如图5 示。
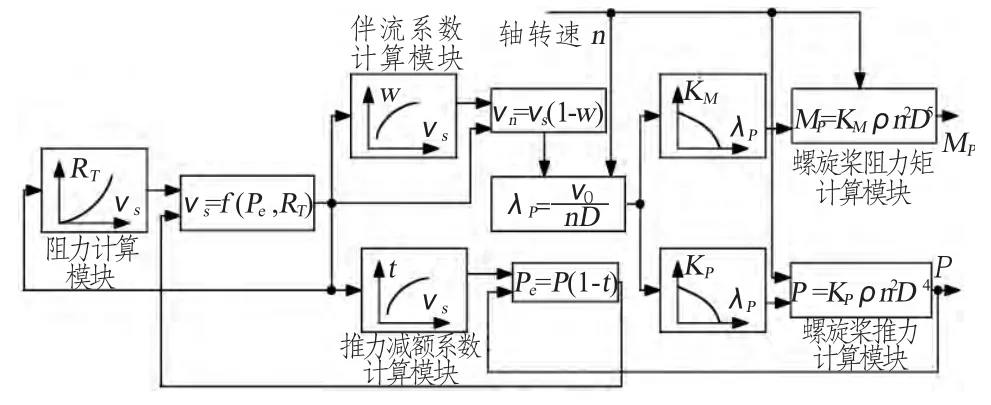
图5 螺旋桨与船体模块分解图Fig.5 Block diagram of the propeller and hull modules
2.5 蓄电池组模块
由于蓄电池的端电压、充放电电流受各种因素的影响很大,蓄电池建模是舰船动力系统建模仿真的难点。随着蓄电池容量的不断减少,其输出电压、电流及电解液密度逐步变化。由于舰船蓄电池的试验经费和使用寿命受到限制,不能在实艇上进行充分实验,但可利用其充放电曲线来建模。
本文所研究的舰船蓄电池采用四级恒电流充电方法充电,当达到第四级过渡电压时,用略高于过渡电压的恒定电压进行充电,并根据过渡电压的变化逐渐降低充电电流,充电结束时对最大充电电流进行限制。充电电量Qc可按照如下公式计算:

式中:I1,I2,I3为一、二、三级充电电流值;t1,t2,t3为一、二、三级充电时间;I4,I5,…,Ik-1为第四级充电过程中的充电电流值;Ik为第四级充电结束时电流值。
蓄电池的放电模型可利用其放电特性曲线并结合电化学经验公式,进行放电过程的仿真。
2.6 辅助机械模块
辅助机械包括一些水泵、油泵、离心泵、辅助电机等设备。辅机的功率一般均可从设计资料或铭牌上获取,在电网电压一定的情况下,可根据当前使用状况来确定辅机耗电电流,将其并入全系统的仿真模型参与仿真计算。
2.7 逻辑和控制系统模块
所有动力系统设备均有相应的控制机构对其实施复杂的逻辑控制,例如推进电机控制系统实现对推进电机的控制。在仿真软件中,设计的人机交互界面与实装控制装置具有对应的关系,当控制系统中的某个开关、指示灯、仪表的状态发生改变时,人机交互界面上的对应部分也发生同样改变。人机交互界面以逻辑控制模型为基础。整个控制系统模型模块化结构图如图6所示。
为了实现对各控制系统的仿真,在仿真系统开发过程中,可建立描述逻辑和控制过程的数学模型,用来模拟系统的操作、控制、安全保护和故障报警等功能。通过描述系统操作和逻辑控制的数学关系式,可以建立逻辑和控制系统的数学模型。

图6 控制系统模型模块化结构图Fig.6 Modular structrue diagram of control system models
在实际控制系统中,通常还具有对被控设备的自动保护功能,这种保护功能的仿真同样可以用逻辑关系式来进行描述,例如当某舰船处于通气管航行工况时,如果柴油机转速大于一定值且排气外舌阀处于关闭状态,逻辑控制系统可以在给定时间后对柴油机发出外部停车信号,使其逐渐减速停车,从而实现安全保护功能。这一逻辑关系可用下式表示(逻辑符号之间的圆点表示逻辑“与”):

各逻辑符号的意义为:“P1 =1”为发出外部停车信号, “P2 = 1”为舰船处于通气管航行状态,“P3 = 1”为柴油机转速大于450 rpm,“P4 = 1”为排气外舌阀关闭,“P5 = 1”为延时过程结束。
3 应用实例及模型验证
以上述方法建立的模型为基础,对某型舰船动力系统主要模块进行模块划分,得到其主要模块结构图如图7 示。

图7 某舰船动力系统主要模块结构图Fig.7 Structure of main modules of the warship's power system
本文的仿真对象主要分为柴油发电机系统、电力推进系统及辅助系统等,主要考虑动力系统的2种典型工况:航行工况(包括水面航行、通气管航行以及水下航行工况)和充电工况。航行工况仿真需综合艇体、螺旋桨、推进电机、蓄电池放电和辅机耗电等几部分模型,各种不同航行工况下需设定不同的参数,例如艇体附水系数、阻力系数等。而充电工况的仿真则还需柴油发电机系统的模型参与运算。
为了验证仿真模型的正确性和精确度,通过试验对该动力系统主要设备模块的运行数据进行了实际测量,同时,对舰船航行过程中螺旋桨转速、航速等参数进行记录,将仿真研究结果与之进行对比。例如,图8和图9 分别是电机转速和电枢电流随时间的变化曲线。图中的参数值均已作无量纲化处理。仿真结果经与实测值比较,能较好地吻合,其动态仿真过程与实测值较为相符,转速、电枢电流、转矩等参数的稳态值与实测值的误差在5%之内。结果表明,以此方法建立的动力系统模型很好地满足了精度需求,比较精确地反映了系统的动稳态特性。

图8 电机转速随时间的变化Fig.8 Curves of motor speed versus time
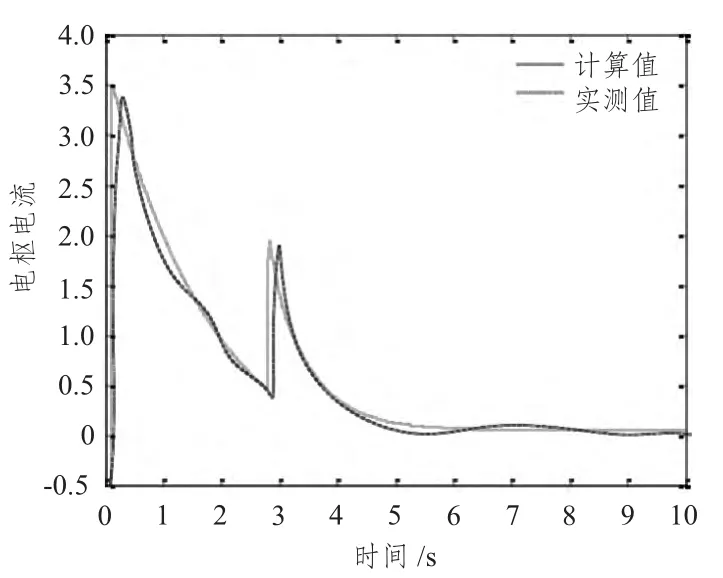
图9 电机电枢电流随时间的变化Fig.9 Curves of motor armature current versus time
4 结 语
本文首先对模块化建模方法进行了研究,针对某型舰船动力系统的特殊性,研究了模块的分类、模块的分解处理等动力系统模块化建模方法;在此基础上,完成了舰船动力系统的模块库的建立,包括柴油机系统模块、发电机模块、推进电机模块、螺旋桨艇体模块、蓄电池模块、辅助机械模块、逻辑和控制系统模块等,克服了传统建模方法得到的模型可移植性与独立性较差的缺点,提高了模型的可重用性。
[1]蒋德松,谢春玲,孙聿峰.一种基于联合动力装置的船舶电力推进原动机模块[J].热能动力工程,2003,18(3):248-251.JIANG De-song,XIE Chun-ling,SUN Yu-feng.A combined power plant-based prime-mover module for marine electric propulsion[J].Journal of Engineering for Thermal Energy,2003,18(3):248-251.
[2]Alf 10re adnanes ABB AS marine.Maritime electrical installations and diesel electric propulsion[M].ABB AS Marine,2003.
[3]刘永文,张会生,苏明.舰船柴油机的模块化建模与仿真[J].船舶工程,2002(1):14-17.LIU Yong-wen,ZHANG Hui-sheng,SU Ming.Modular modeling and simulation of marine diesel engine[J].Ship Engieering,2002(1):14-17.
[4]姚寿广,肖民.舰船动力装置[M].国防工业出版社,2006.YAO Shou-guang,XIAO Min.Ship power plant[M].Defense Industry Press,2006.
[5]张维竞.舰船动力装置系统仿真[M].上海:上海交通大学出版社,2006.ZHANG Wei-jing.Simulation of ship power plant system[M].Shanghai:Shanghai Jiao Tong University Press,2006.
[6]刘兴堂,吴晓燕.现代系统建模与仿真技术[M].西安:西北工业大学出版社,2001.LIU Xing-tang,WU Xiao-yan.Modeling and simulation technology of modern system[M].Xi'an:Press of Northwest Industrial University,2001.
