基于电流信息的电机回转偏心检测方法
2014-11-25徐光华董家成
刘 飞 梁 霖,2 徐光华,3 董家成
(1.西安交通大学机械工程学院 710049 西安
2.西安交通大学现代设计及转子轴承系统教育部重点实验室 710049 西安3.西安交通大学机械制造系统工程国家重点实验室 710054 西安)
1 引言
电机回转精度是衡量驱动设备动态精度的一个重要指标。传统方法采用测量轴端端跳作为电机静态回转精度值,这种方法在一定程度上可以满足工业现场的需要。但是,在高速驱动、精密加工设备中,只检测驱动电机回转静态精度其适用范围存在着较大的局限性,必须对电机动态回转精度进行测量与控制。对于伺服电机来说,转子的运动直接影响到电机气隙磁场的分布,这就为利用电流信息检测电机的回转精度提供了可能。
高速切削状态下,伺服电机的回转精度直接影响到其加工质量,因此对电机动态回转精度的检测对提高加工性能具有重要意义。本文通过分析电机转子回转波动在定子电流中的表现机理,提出利用定子反馈电流信号检测电机回转偏心的方法。通过分析电机回转精度在定子反馈电流信息中的表现特征,利用电流信号幅频特征与转子偏心量的关系,建立起电机回转偏心的测量模型。这种方法较好的解决了外置传感器信号受电机磁场干扰的问题,可以提高对电机动态回转精度检测的可靠性与稳定性。
2 电机回转偏心模型
2.1 电机回转偏心的数学模型
在理想情况下,电机转子回转运动的中心应该与定子截面中心重合。但是由于运动误差和装配误差,会使回转中心偏离定子截面中心,在单截面上就表现为实际回转中心与理想回转中心的偏离,即回转偏差。
电机回转偏差有静偏心和动偏心两类。静偏心是由电机定子铁心的形状误差、加工装配误差引起的。在转轴刚度足够的情况下,静态偏心的大小不会变化。动态偏心是由于气隙磁场的最小位置在不断变化引起的。在实际回转过程中,两种偏心通常是同时存在[1]。
电机回转偏心建模如图1 所示,设R 与r 分别表示定、转子的半径,转子中心和定子中心(理想回转中心)有长度为d 的位移量,则气隙长度的大小取决于机械角度α。
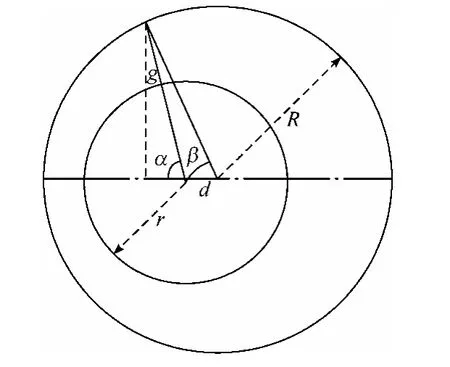
图1 电机回转偏心建模示意图Fig.1 Schematic model of motor rotational eccentricity
这里,以静偏心为例(动态偏心分析可类似得出),选择中心为转子中心,则静偏心g 为

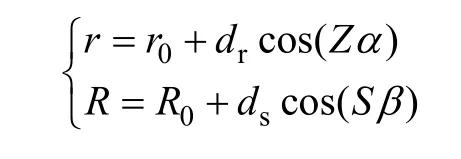
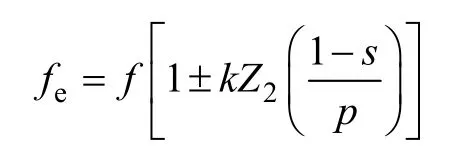
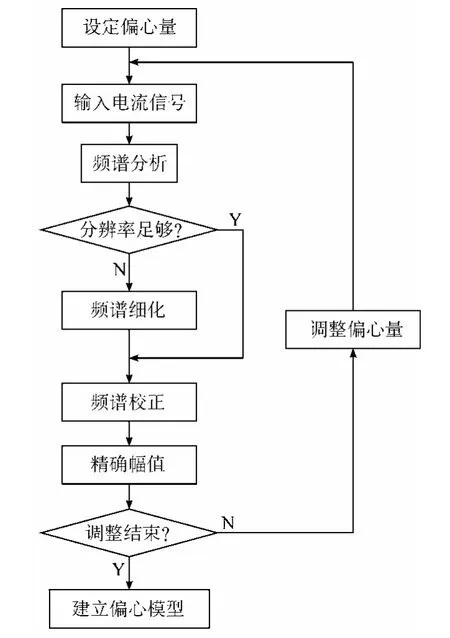
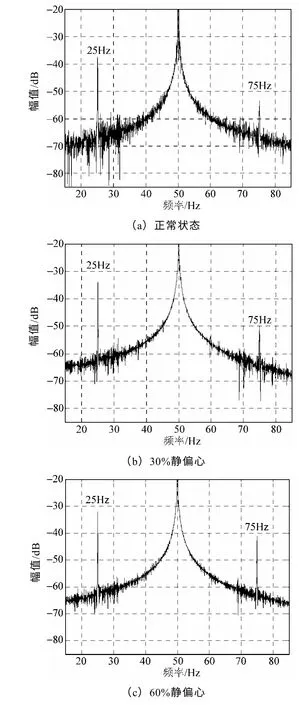
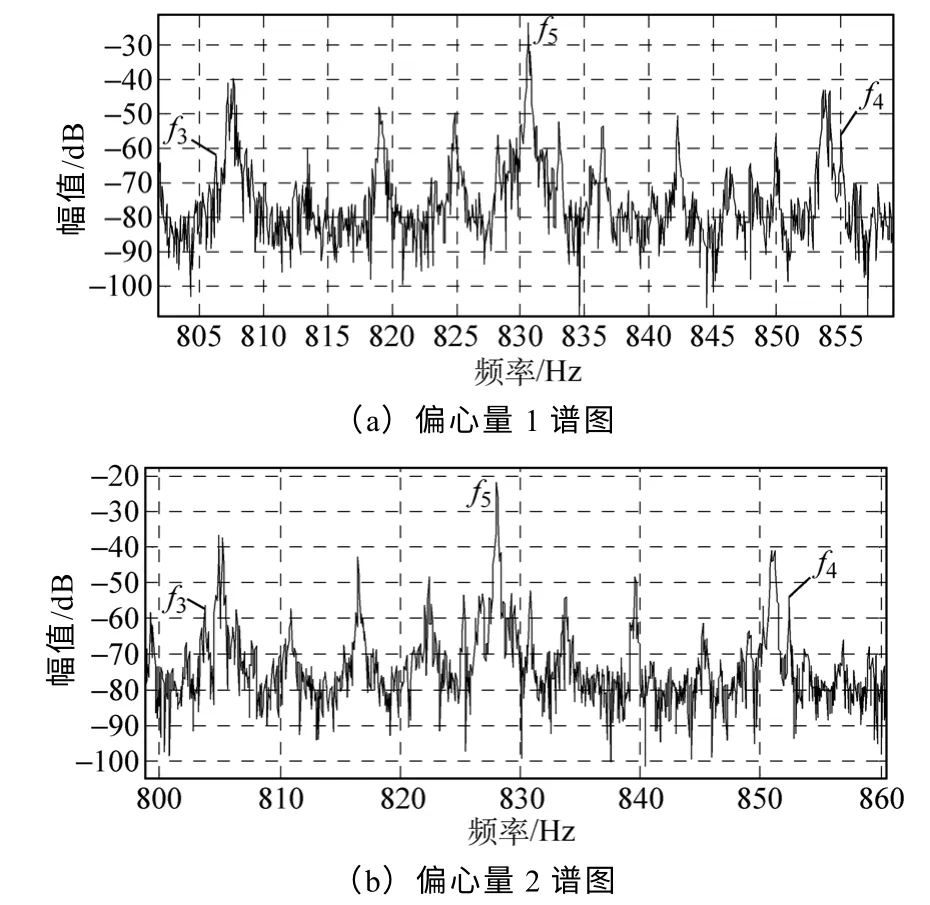
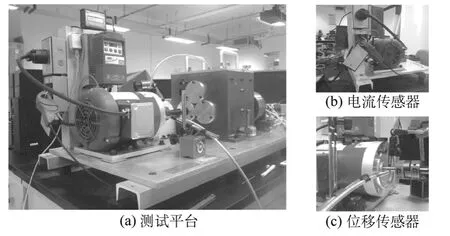
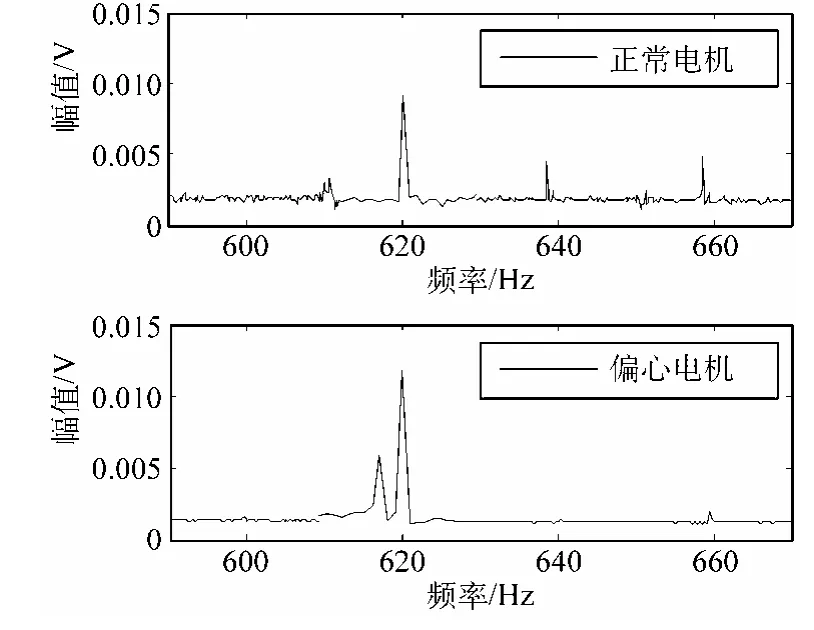
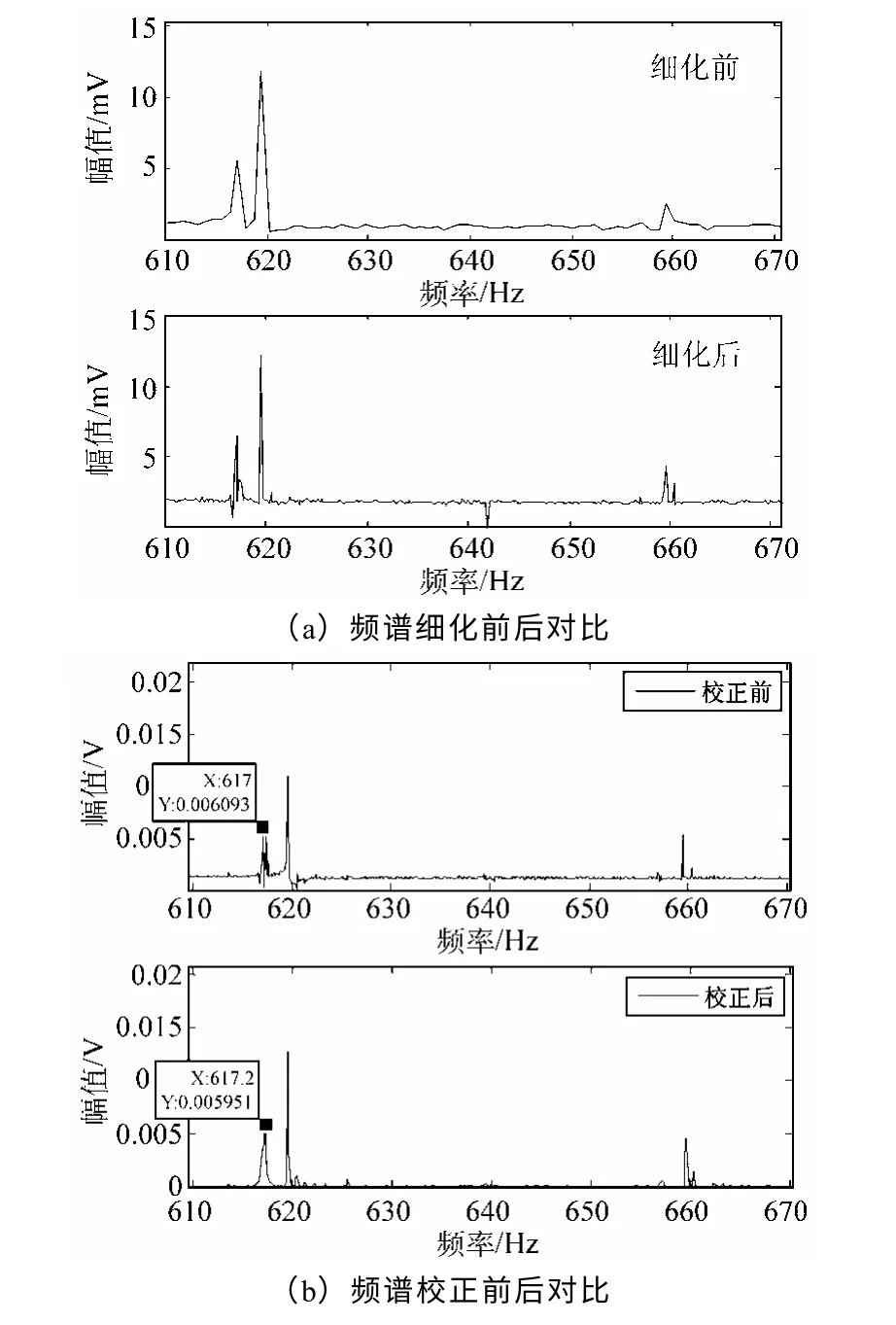
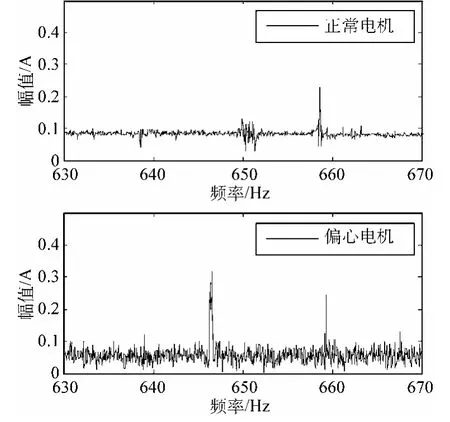
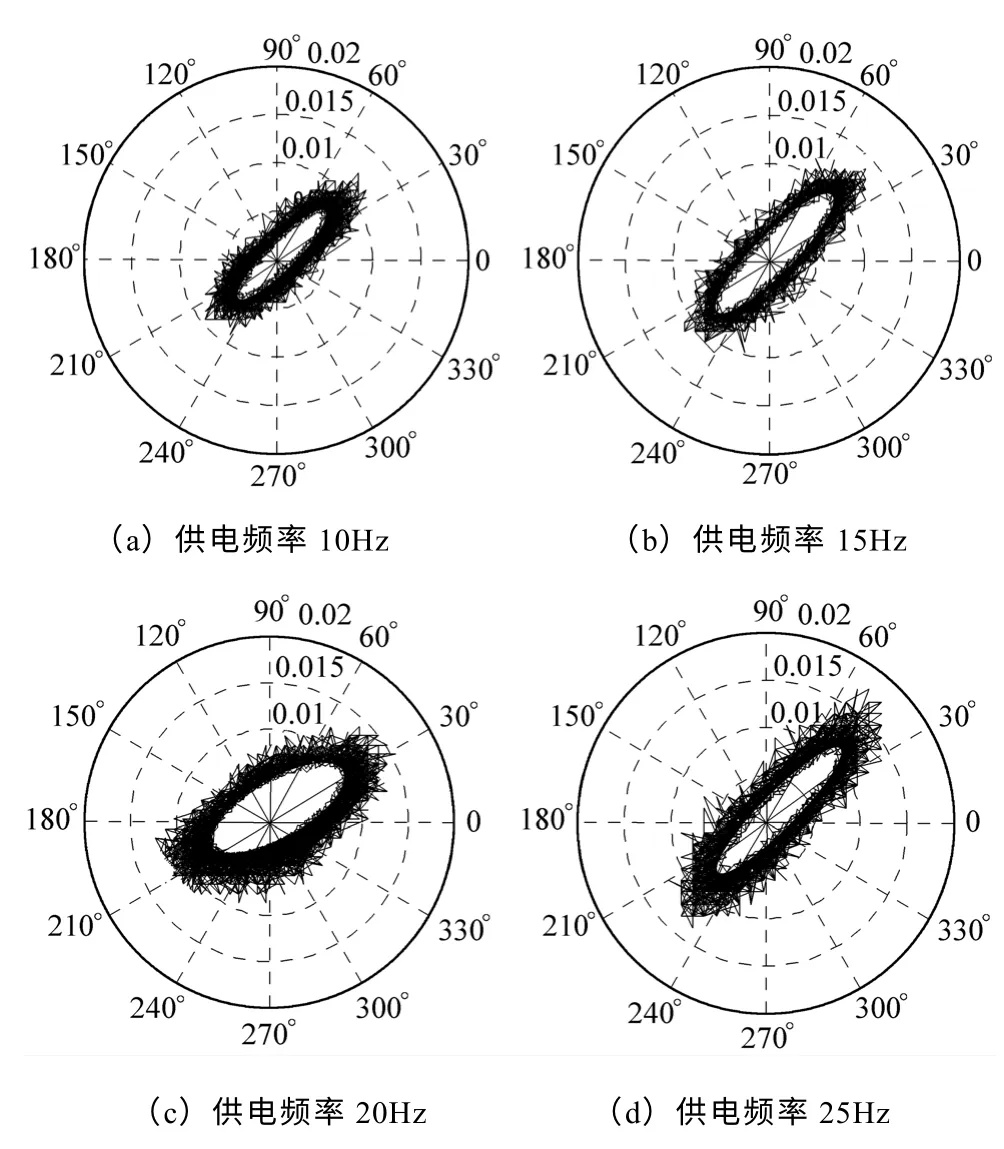
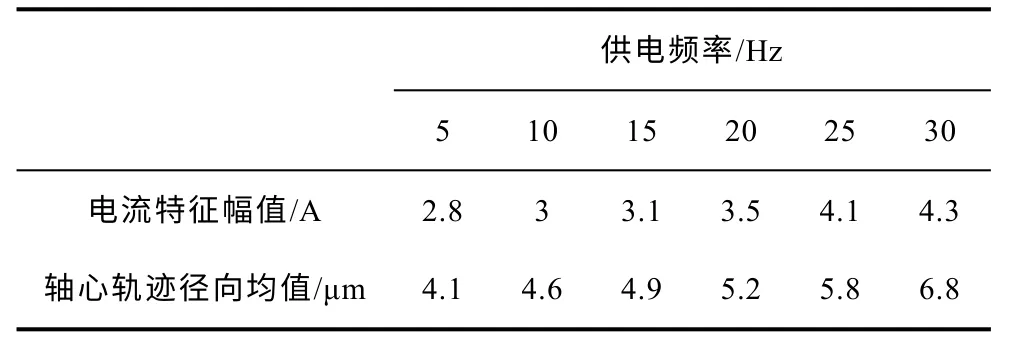
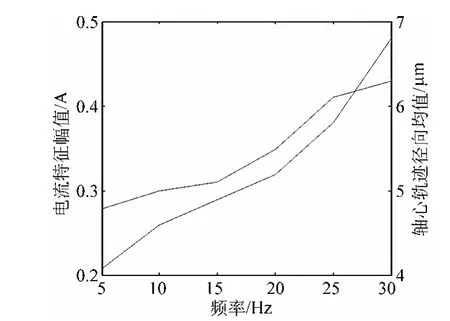
由于d< 由于定转子开槽的影响,R 与r 可以表示为 式中 S,Z——定子和转子的槽数; R0,r0——定子和转子去槽后的半径; dr,ds——去槽后中心偏置位移量。 由此得出气隙磁导Ps为 式中 ε——相对偏心率,ε=d/δ。 通过电机回转偏心的数学模型,分析转子偏心对气隙磁通的影响。气隙磁通等于磁动势与磁导的乘积。转子偏心后,使得磁导发生变化,进而影响电机的电感和气隙磁通密度,最终影响定子电流频谱中特定的频率。当转子偏心后,使气隙磁导发生变化,假设定转子表面平滑,则对于静态偏心,气隙磁导可表示为[2] 对于动态偏心,气隙磁导可表示为 式中 P0——气隙平均磁导; Pn——第n 次磁导的幅值; ωr——电机的角速度; θ——机械角度。 定子电流中感应出相应的特征频率表达式为 式中 fs——需要被监测的偏心特征频率; f——电源基波频率; k——任意整数(通常取1); Z——转子槽数; nd——偏心级数,nd=1,2,3,…; ns——定子电源中存在的时间谐波级数,ns=±1,±2,±3,…; p——电机极对数; s——转差率。 通过磁场分析,根据定转子开槽气隙磁导和偏心引起的磁导求出联合磁导分布,确定特征频率。 偏心的电流特征频率为 式中 f——电源基频; Z2——转子槽数; s——转差率; p——极对数; v——定子谐波的阶数,v=±1,±3,±5,…; nd=0时,得到静态偏心频率,nd=1,2,3…时得到动态偏心频率。 表征电机主轴回转偏心的特征频率如式(2)或式(3)所示。 当v=1,nd=0 时,式(3)可简化为 气隙磁通的谐波成分在定子电流中能感应出同频分量,通过检测特征频率分量的大小即可判断电机回转中心与理想中心的偏差的情况,这就是通过定子电流检测电机回转误差的依据。 同时,对于特征频率难以分辨,采用频谱细化的方法解决,通过细化提高频谱的分辨率,使得特征信号的提取更为明晰。本文对电机回转偏差特征的分析流程如图2 所示。 图2 电机回转偏心特征提取分析方法Fig.2 Feature extraction approach of motor rotational eccentricity 通过正常电机与偏心电机的对比,说明偏心电机的故障特征,主要是通过采集电机定子电流信号进行分析。 图3 分别为某交流伺服电机在不同的静偏心状态下的频谱图。其中,图3a 为正常状态,图3b 和图3c 分别为30%和60%的静偏心状态下的电流谱。电机运行在空载状态下,则电机转速接近同步转速,转差率s 非常小,静偏心频率分量fe为25Hz 和75Hz。 图3 交流伺服电机电流状态谱图Fig.3 Current signal spectrum of AC motor 从图3 中非常明显地看出,由于静偏心的增加,特征频率25Hz 和75Hz 处的频率分量增加非常明显。图3b 中的25Hz 和75Hz 频率分量的出现是由于电机的装配等原因引起的,只不过幅值较小,这也说明在一般的电机中由于各种原因,即使是装配良好的电机,静偏心是在所难免的。 式(3)中取nd=0,k=1,v=1,由于空载运行,则计算出电流高频分量(即主齿谐波)见表1。由表1 可见,随着偏心量的增加,主齿谐波分量幅值将增加。说明静偏心故障同时引起了高频特征频率分量的变化。 表1 三种状态频率幅值对比Tab.1 Comparison chart for three states frequency and amplitude 当电机存在动态偏心时,根据谐波分离理论可知偏心故障的谐波分量可以取主要分量来进行计算,但特征频率的减少会由于噪声的影响,产生误判断,这里需要注意选取谐波分量的原则:①要保留重要特征频率;②受噪声影响较小;③频率不能离基频太近,减少泄漏影响;④尽量取整数谐波;⑤高频部分少取。基于上述原则进行特征选取。 3.2.1 高频特征频率 在式(3)中取k=1,v=±1,nd=±1 时,特征频率为 3.2.2 低频特征频率 低频偏心故障引起的磁通变化,式(4)所示为频率分量的变化范围 式中 f——电源频率; fr——电机转频。 当n=1,k=3/p,特征频率为[1 ±1.5(1 -s)]f 。对于k=±1 的频率,由于计算出的特征频率与电源倍频十分接近,容易受到泄漏的影响。 表2 给出了在两种转速下产生的不同的偏心关系,其中偏心量2 对应着较大的偏心状态,偏心量1对应着较小的偏心状态(见图4)。式(3)和式(4)所示的特征频率可以较好的反映出动偏心,它们分别反映了高频和低频分量的变化,采用两式作为故障的特征频率是比较理想的。 表2 偏心量与转差率Tab.2 Eccentric amount and slip ratio 图4 电机动态偏心量谱图Fig.4 Spectrogram of motor rotational eccentricity 本文以电机故障模拟台作为验证对象,并以此说明基于电流信息的转子回转精度特征识别和定量诊断方法。实验平台(见图5)采用Spectra Quest 公司设计的故障仿真器,其提供多种故障电机以供测试。 图5 电机转子偏心实验测试Fig.5 Experimental test of motor rotational eccentricity 本实验通过变频器调速,变频器设置的输出工频为20Hz,此时通过转速传感器测量的电机输出转速供电频率为18.74Hz。当nd=0,v=1 时,将以上参数代入式(3)可得电机的静偏心特征频率为617.2Hz。首先,将采集到的定子电流信号进行频谱分析得到如图6 所示,从图中可以看出,静偏心特征频率与工频的高次谐波很接近;然后,通过频谱细化提高信号频谱的分辨率,以利于特征频率的识别,结果如图7a 所示;再通过频谱校正进一步提高分析精度,结果如图7b 所示。 图6 电流信号频谱Fig.6 Spectrogram of current signal 图7 电机转子静偏心频谱分析结果Fig.7 Spectrum analysis of static eccentricity 由以上分析结果可知,通过频谱细化和频谱校正,电机电流的频谱分析结果得到了明显改善,频率分辨率及频谱分析的精度均得到了增强。当转子静偏心程度达到0.1mm 时,静偏心特征频率的幅值为0.006。同时,对不同转速下的电机静偏心量进行检测,实验表明,转速递增静偏心程度也将递增。 电机动偏心量测试比较复杂,仅仅通过电流传感器无法准确获得结果。针对这个问题,本文利用电流传感器检测动态偏心的特征频率与外置位移传感器检测转子轴心轨迹,通过轴心轨迹来判断转子动偏心的程度。对于一般工作状态下,电机的负载是恒定的,且负载波动也是很小,所以利用电机的空载状态对电机的动偏心进行测试。 设定电机空载运行,电机由变频器供电,供电频率为20Hz,测量得到的实际转频为19.6Hz。实验一方面通过电流传感器测量定子电流信号;另一方面,通过电涡流位移传感器测量转子输出轴的位移信号。 首先按式(3)计算转子动偏心故障在定子电流中的特征频率,根据电机参数可以计算出转子的动偏心特征频率为646.5Hz。其次,对采集得到的定子电流信号进行频谱分析,得到图8 所示结果,从图中可以明显看出转子动偏心的故障特征频率。 图8 动偏心电流信号频谱Fig.8 Spectrum analysis of dynamic eccentricity 对于转子的实际偏心状况,通过电涡流位移传感器进行测量,测量截面轴心的位移量得出转子的轴心轨迹,通过对轴心轨迹的评估来判断转子的动偏心状况。 转子轴心轨迹的测量与定子电流的测量是同步进行的,转子在10Hz、15Hz、20Hz、25Hz 的供电频率下运行,测量得到转子的轴心轨迹如图9 所示。从图中可以看出,转子轴心轨迹带有明显的方向性,说明转子存在不平衡或者转子弯曲引起的动偏心。 图9 不同转速下轴心轨迹图谱Fig.9 Spectrogram of axis center orbit at different speed 以极坐标下轴心轨迹的径向幅值的平均值为转子动偏心的衡量标准,对应不同转速下定子电流中的特征频率的幅值,得到表3 所示的模型。 表3 不同转速下转子动偏心的电流特征幅值与偏心状况Tab.3 Comparison chart for amplitude of current signal and state of rotational eccentricity at different speed 表3 说明不同转速下转子动偏心状况与电流特征幅值的对比情况。图10 描述同一个存在动偏心的转子,随着转速的提高,轴心轨迹的径向均值有一定增长,同时,定子电流中的特征频率处的幅值也随之增长,并且趋势基本一致。由此说明,在负载恒定的状态下,随着转速的增加会引起转子偏心的增大。 图10 不同转速下偏心状况与电流特征幅值关系图Fig.10 Correlation diagram for eccentric status and amplitude of current characteristics at different speeds 本文在研究了电机回转偏心在定子电流信号表现规律的基础上,针对实际偏心检测中存在难检测难识别的问题提出了具体的解决方法。通过对电机进行偏心测试实验,对方法进行了验证和应用。结果表明,利用电流信息与动态轴心轨迹可以有效地测量与估计电机的回转偏心状况。同时,也证明了通过电机定子电流信号对电机回转偏心进行监测与诊断的有效性。 [1]梁霖.基于电流法的鼠笼异步电机故障特征提取及自动诊断[D].西安:西安交通大学,2001. [2]赵向阳,葛文韬.基于定子电流法监测无刷直流电动机转子动态偏心的故障模型仿真研究[J].中国电机工程学报,2011,31(36):124-130.Zhao Xiangyang,Ge Wentao.Simulation research of fault model of detecting rotor dynamic eccentricity in brushless DC motor based on motor current signature analysis[J].Proceedings of the CSEE,2011,31(36):124-130. [3]宁玉泉.大型三相异步电机气隙偏心的在线监测和故障诊断[J].大电机技术,1999(6):20-24.Ning Yuquan.On-line monitoring and fault diagnosing for eccentric gap of large 3-phase asynchronous machines[J].Large Electric Machine &Hydraulic Turbine,1999(6):20-24. [4]Liu Yukun,Guo Liwei,Wang Qixiang.Application to induction motor faults diagnosis of the amplitude recovery method combined with FFT[J].Mechanical Systems and Signal Processing,2010(24):2961-2971. [5]Jee Hoon Jung,Jong Jae Lee,Bong Hwan Kwon.Online diagnosis of induction motors using MCSA[J].IEEE Transactions on Industrial Electronics,2006,53(6):1842-1852. [6]Martins J F,Pires V F,Pires A J.Unsupervised neural-network-based algorithm for an on-line diagnosis of three-phase induction motor stator fault[J].IEEE Transactions on Industrial Electronics,2007,54(1):259-264. [7]Yacamini R,Smith K S,Ran L.Monitoring torsional vibrations of electro-mechanical systems using stator currents[J].Journal of Vibration and Acoustics,1998,120 (1):72-79. [8]Kia S H,Henao H,Capolino G A.Mechanical trans-mission and torsional vibration effects on induction machine stator current and torque in railway traction systems[C].IEEE Energy Conversion Congress and Exposition,2009:3182-3187. [9]沈标正.电机故障诊断技术[M].北京:机械工业出版社,1998. [10]屈梁生.故障诊断学[M].北京:机械工业出版社,1985.

2.2 电机回转偏心的电流特征频率




2.3 电机回转偏心特征提取分析方法
3 电机回转偏心电流频率特征分析
3.1 电机回转静偏心电流频率分析

3.2 电机回转动偏心电流频率分析


4 电机回转偏心量化分析
4.1 电机回转静偏心量化分析
4.2 电机回转动偏心量化分析
5 结论
