基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法
2014-11-25张洪帅韩邦成程金绪
张洪帅 王 平 韩邦成 程金绪
(1.中国石油大学(华东)信息与控制工程学院 青岛 266580 2.北京航空航天大学惯性技术重点实验室 北京 100191 3.北京航空航天大学新型惯性仪表与导航系统技术国防重点学科实验室 北京 100191 4.胜利油田供应处 东营 257100)
1 引言
高速永磁同步电机(HSPMSM)具有体积小,效率高,功率密度大,转动惯量小,动态响应快,调速范围宽,与高速无刷直流电机相比具有转矩脉动小等优点,其转速可以达到每分钟几万至十几万转。随着HSPMSM 的发展和永磁材料价格的降低,它的应用也越来越广泛。如大功率压缩机、鼓风机,新能源飞轮储能等,可以省去机械提速装置,提高了系统的运行效率,达到了节能降耗的目的。矢量控制技术是传统的永磁同步电机的驱动方式,要实现电机的高精度高效率控制,必须对电机转子位置进行检测。传统的永磁同步电机的转子位置检测方法通常为转子位传感器,加大了系统的体积和转子的转动惯量,增加了系统成本,降低了系统可靠性。因此有必要对HSPMSM 无位置传感器矢量控制技术进行研究。
目前常用的无位置传感器转子位置检测方法主要有利用电机凸极效应的高频信号注入法[1],但此种方法对电机的结构有一定的要求,适用性差;第二类方法则利用反电动势或者磁链估算转子位置,常用的方法有模型参考自适应法[2],滑模观测器法,扩展卡尔曼滤波法[3]等。滑模观测器法(SMO)以其强鲁棒性,计算简单,便于工程应用和数字实现而备受青睐,但它也存在低速抖振问题[4-8]。根据李雅普诺夫稳定判据,永磁同步电机基于滑模观测器的位置检测模型的稳定条件为滑模增益K>Max(eα,eβ),其中eα,eβ为反电动势幅值。HSPMSM 的转速高,调速范围宽,因此其反电动势幅值波动范围大,要保证SMO 稳定性,必须使滑模增益大于其反电动势的最大值,而高滑模增益会加剧低速抖振,造成低速状态下位置检测精度低,甚至无法检测转子位置。为此,本文提出了一种模糊滑模观测器[9]的转子位置检测方法,将模糊控制系统与滑模观测器结合起来[10],通过模糊控制确定增益K 的大小,此方法与基于饱和函数的SMO 相比低速抖振抑制效果更好,且提高了SMO 的动静态性能,适用于调速范围宽,反电动势系数小的高速永磁同步电机。通过仿真分析和实验证明,该方法提高了 HSPMSM的位置检测精度,便于工程应用和数字实现,适用于磁悬浮高速永磁同步电机位置检测。
2 模糊滑模观测器数学模型
2.1 隐极式永磁同步电机数学模型
隐极式高速永磁同步电机在α-β 坐标系下的定子电压方程可表示为

式中 uα,uβ——α、β 轴上的定子电压;
iα,iβ——α、β 轴上的定子电流;
Rs,Ls——定子电阻和电感;
p——微分算子,p=d/dt;
ω ——转子电角速度;
ψf——转子磁链。
2.2 模糊滑模观测器数学模型
由式(1)可得
因此滑模观测器的数学模型可以写为

由于Ksw是由模糊控制系统确定的,其值是连续的,因此模糊滑模观测器可以省去低通滤波器。
滑模观测器的切换函数可以定义为

从而可得转子位置为
对反电动势进行积分可得定子两相坐标系下的转子磁链ψα,ψβ。
则可得估计转速
此种方法可以消除电机使用或运行过程中磁链的变化对转速估计的影响,但需要注意的是,由于积分容易产生偏置分量,因此需要对所估计的磁链进行高通滤波,以滤除偏置分量,高通滤波器的加入导致在低速时所估计的转速偏大。为弥补低速时此种方法的不足,本文在低速时采用如式(9)的方法对转速进行估计,而在高速时对磁链常量ψf进行修正,这样就能提高低速时的转子速度估计精度。
2.3 模糊控制滑模增益系统设计


图1 系统输入偏差E 及其隶属函数Fig.1 Input E and its membership function
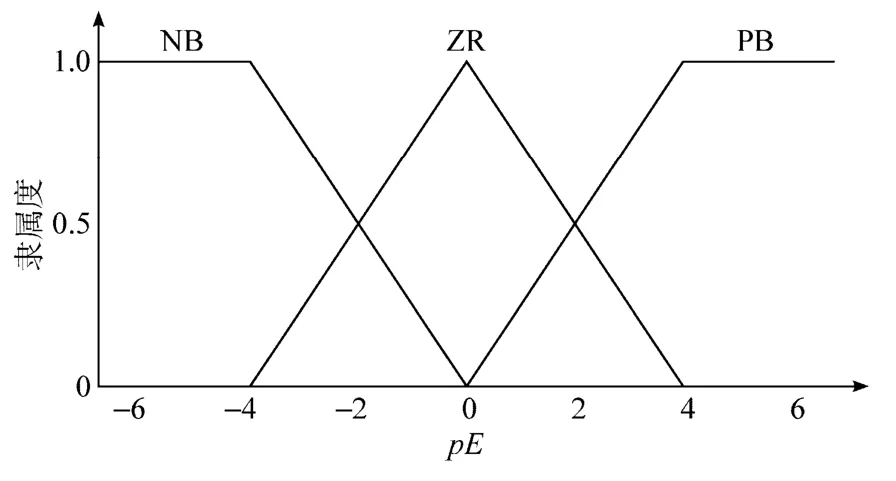
图2 系统偏差变化率pE 及其隶属函数Fig.2 Input pE and its membership function

图3 输出变量Ksw及其隶属函数Fig.3 Output Kswand its membership function
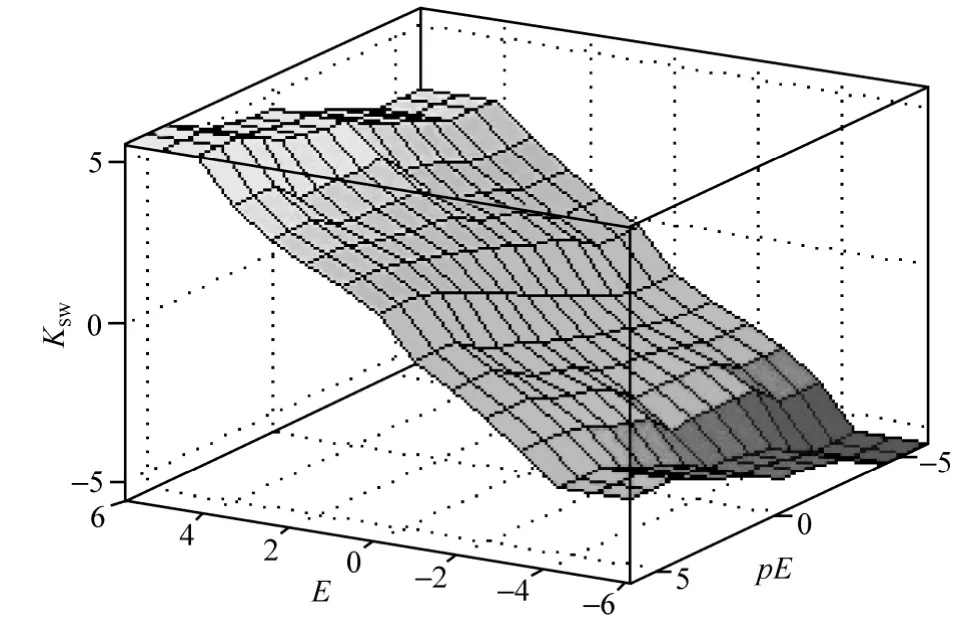
图4 模糊控制的输入输出关系Fig.4 The relationship of the output and input for fuzzy control

为了更有效的抑制 PMSM 转子位置滑模观测器的抖振,本文根据高速永磁同步电机的转速来调整模糊控制输出增益Ksw的边界厚度K,在保证滑模观测器动静态性能的同时进一步降低其抖振。Ksw的边界K 取值为

式中,Ke为HPMSM 的反电动势系数;η 为经验系数,一般取1.1~1.3,以使Ksw满足滑模观测器的稳定条件。
当转速不高于ω0时,K 取常值K0,当转速高于ω0时,Ksw的边界值K 随转速的增大而增大。综上所述,可得模糊滑模观测器的系统原理图如图5 所示。

图5 模糊滑模观测器的系统原理图Fig.5 The system principle diagram of the fuzzy SMO
2.4 模糊滑模观测器稳定性分析
为了证明模糊滑模观测器的稳定性,构造李亚普诺夫函数为

式(12)中第三项恒小于等于0,因此Ksw需满足条件

因此只要满足模糊控制器输出的Ksw的边界值K 大于反电动势幅值的最大值即可保证模糊滑模观测器的稳定性。
2.5 转子位置误差分析及补偿
模糊滑模观测器转子位置的误差来源主要有:①系统响应时间导致的相位延迟误差θes;②硬件电路的低通滤波器产生的相位延迟误差θef。系统输出的估计转子位置角度为

则真实转子位置角度为

低通滤波器的相位延迟误差为
式中 ω——转子电角速度;
ωc——低通滤波器的截止角频率。
系统响应时间导致的相位延迟误差为

式中 ΔT——系统响应时间常数;
Tω——转子旋转一个电角度周期所用的时间。
3 仿真分析
本文选取4kW 纯电磁磁轴承表贴式高速永磁同步电机来验证模糊滑模观测器法的可行性,通过搭建系统Simulink 仿真模型并进行仿真研究。电机的参数在20℃时为:相电阻R=40mΩ,交直轴电感Ld=Lq=0.17mH,反电动势系数Ke=4.15/V/(kr/min),相磁链峰值ψf=0.04Wb,极对数p=1,额定转速n=30 000r/min。仿真参数设为固定步长,取0.000 01,算法为ode3,图6 为系统的矢量控制原理图。
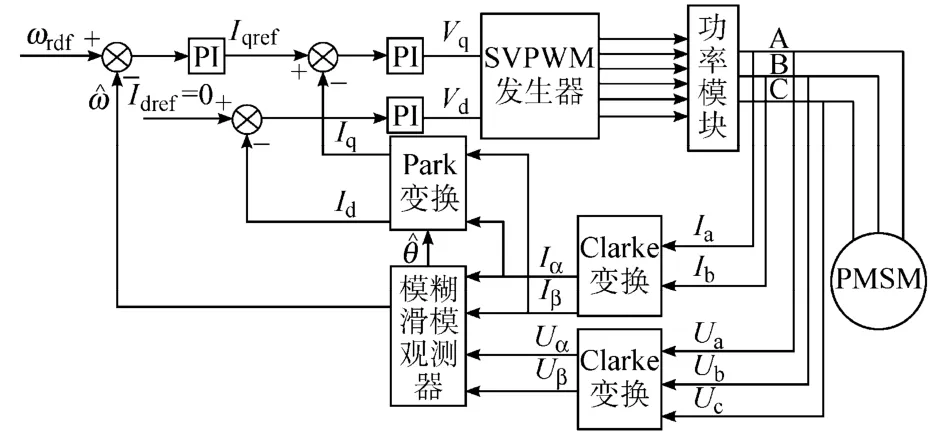
图6 系统的矢量控制原理图Fig.6 The schematic of the vector control
图7 为模糊滑模观测器以及普通滑模观测器对HSPMSM 低速区域500r/min 仿真波形。从仿真结果来看,模糊滑模观测器对低速抖振有很好的抑制作用。图8 为HSPMSM 运行在中低速状态时两种位置检测方法的对比。可以看出当电机转速升高后,普通的滑模观测器由于滑模增益过小,会出现失稳的状态,而模糊滑模观测器仍能很好地跟踪电机的转子位置。
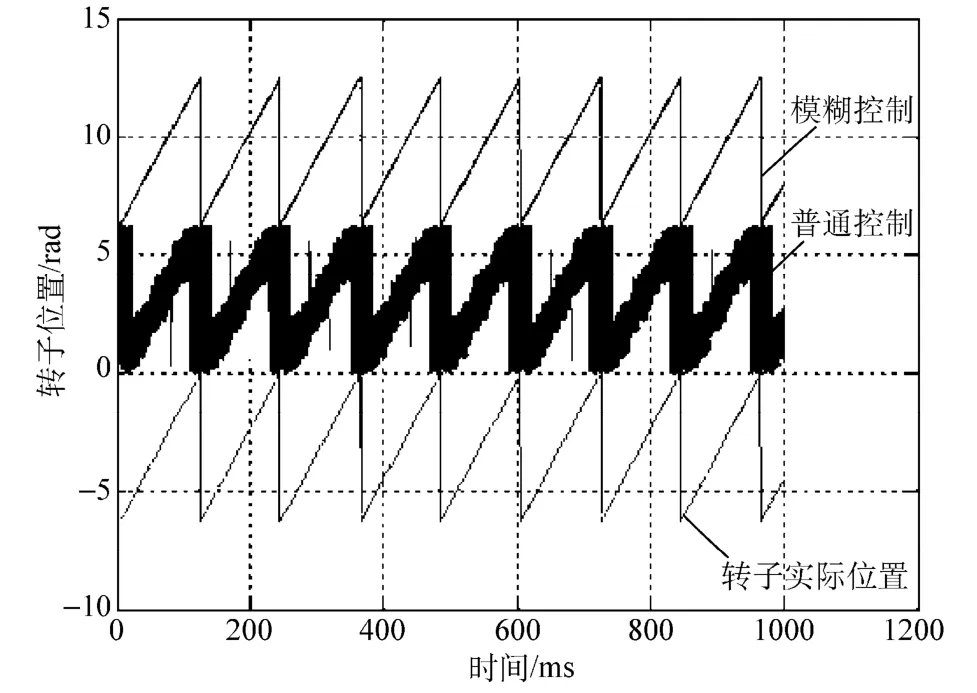
图7 低速区域(500r/min)HSPMSM转子位置检测仿真波形Fig.7 The simulation curve of the HSPMSM rotor’s position in low speed region(500r/min)
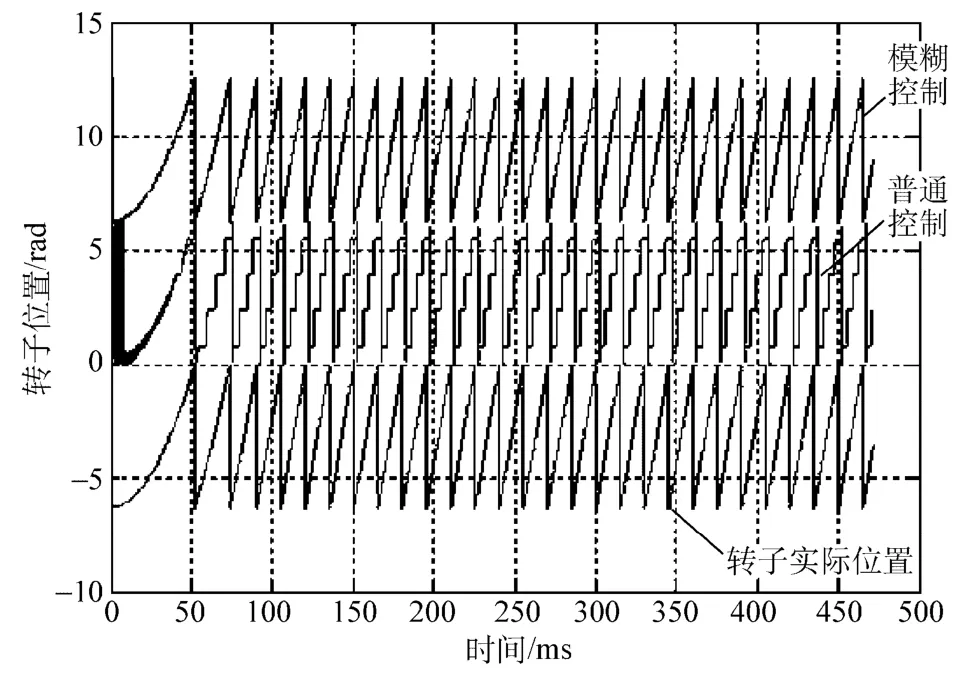
图8 低速区域(4 000r/min)HSPMSM转子位置检测仿真波形Fig.8 The simulation curve of the HSPMSM rotor’s position in low speed region(4 000r/min)
4 实验结果分析
为验证此种方法的实用性,本文选取与仿真参数相同的电机进行实验,搭建HSPMSM 控制系统实验平台,控制策略为Id=0 的矢量控制,电机所带负载为风机负载,功放模块采用三菱 IPM(PM25RLA120),设定开关频率为10kHz,所估计的转子位置通过外接的D-A 芯片输出到示波器。图9 为系统实物图,图10 为控制系统的硬件结构框图。
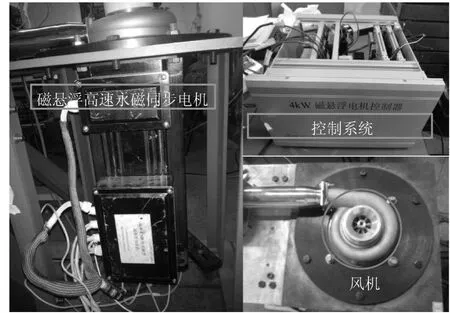
图9 系统实物图Fig.9 The photo of the system
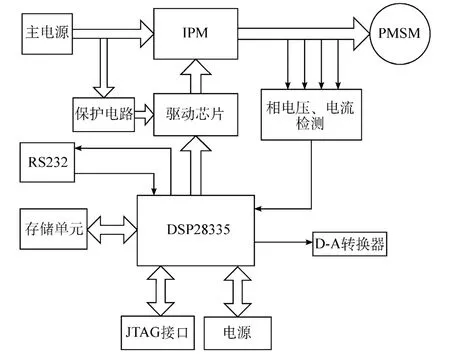
图10 控制系统硬件结构框图Fig.10 The schematic of the hardware structure
图11 为模糊滑模观测器估计的两相定子坐标系下的反电动势以及转子位置波形。
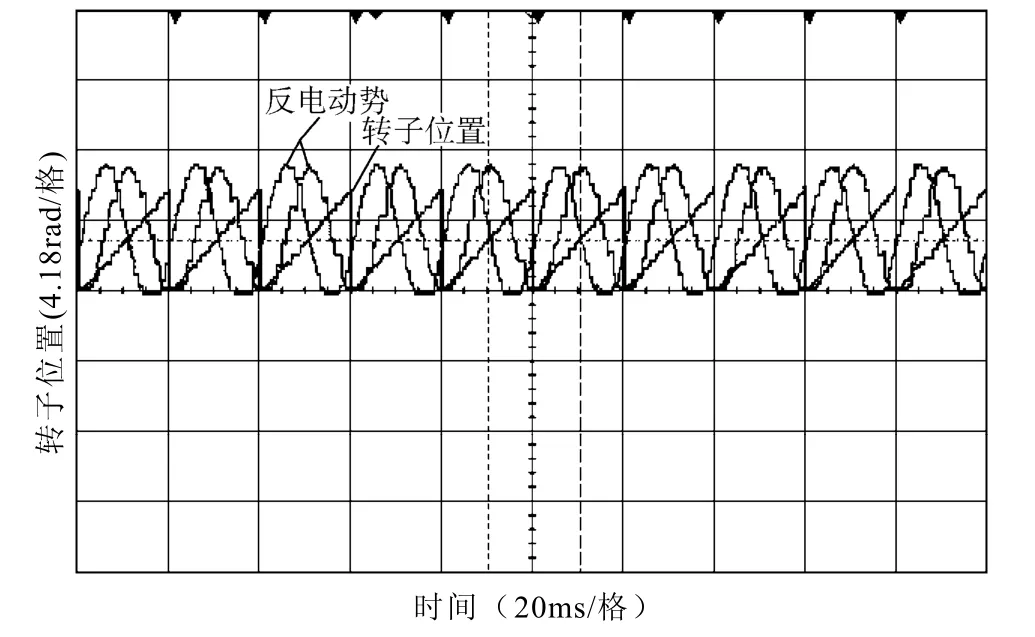
图11 模糊滑模观测器估计的两相定子坐标系下的反电动势以及转子位置波形Fig.11 The experimental curve of the EMF and rotor’s position for the fuzzy SMO
图12 为低速(500r/min)时模糊滑模观测器以及普通滑模观测器的实验波形图(图中的矩形波为电机安装的离散霍尔传感器的信号,其上升沿延迟于电机A 相反电动势30°电角度)。从图12 可以看出,在低速时,模糊滑模观测器对低速抖振有明显的抑制作用。
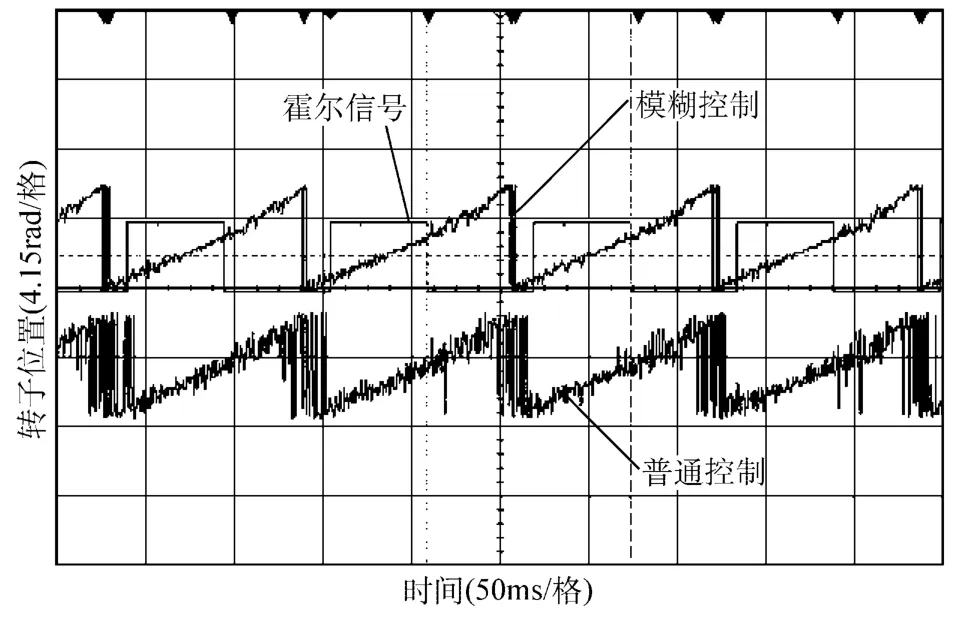
图12 低速(500r/min)时模糊滑模观测器以及普通滑模观测器的转子位置波形Fig.12 The experimental curve of the HSPMSM rotor’s position in low speed region(500r/min)for fuzzy SMO and traditional SMO
图13 为转速4 000r/min 时模糊滑模观测器以及普通滑模观测器的实验波形图。从图中可以看出,当转速升高时,由于反电动势增大,普通的滑模观测器的滑模增益开始小于反电动势的最大值,不再满足李雅普诺夫稳定性判据,导致普通滑模观测器运动点不能再快速收敛到滑模超平面,而模糊滑模观测器由于滑模增益可以通过模糊控制器调节,依然可以很好地估计出转子的角度。
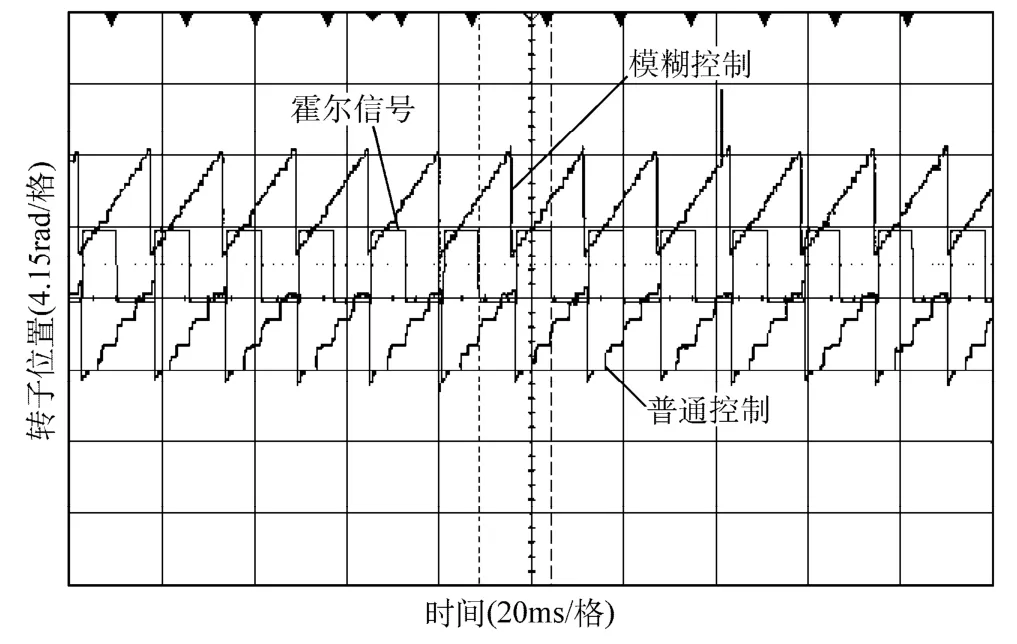
图13 4 000r/min 时模糊滑模观测器及普通滑模观测器的转子位置波形图Fig.13 The experimental curve of the HSPMSM rotor’s position in low speed region(4 000r/min) for fuzzy SMO and traditional SMO
图14 为补偿前后的转子位置波形,从图中可以看出,经过补偿后,转子位置的延迟减小并接近转子实际位置。图15 为转速22 000r/min 时模糊滑模观测器估计的角度以及A 相定子电流波形图,可以看出,在高速区域,经过补偿以后,模糊滑模观测器依然可以很好地估计转子位置角度。
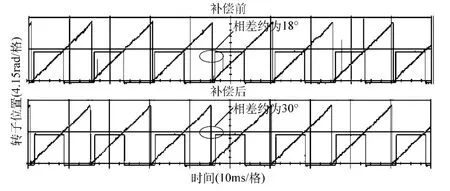
图14 补偿前后估计的转子位置Fig.14 The rotor position before and after compensation
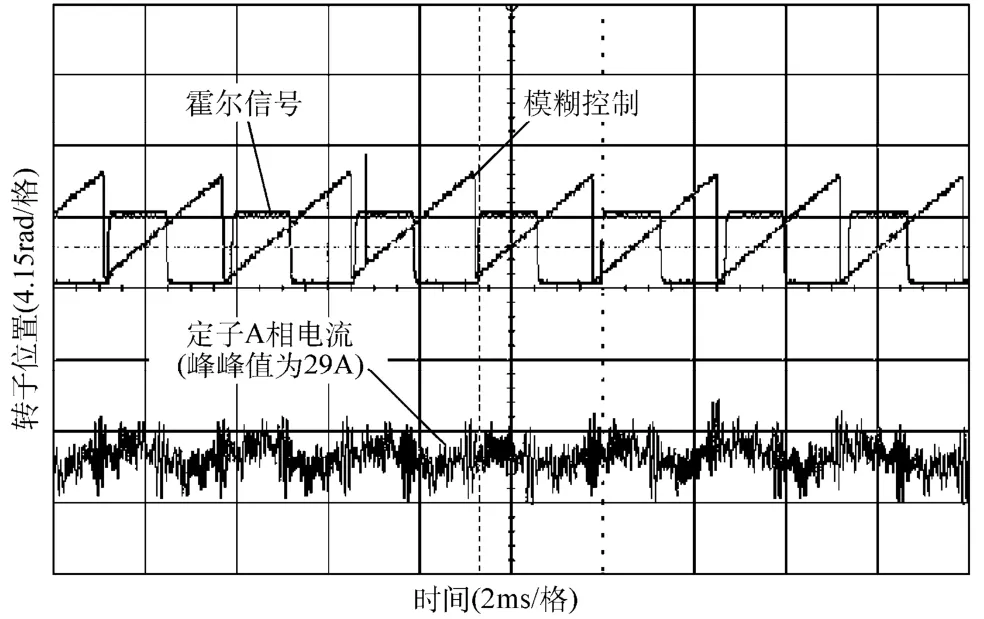
图15 22 000r/min 时模糊滑模观测器估计的转子位置以及A 相定子电流波形图Fig.15 The experimental curve of the HSPMSM rotor’s position for improved SMO and the current of phase A
5 结论
通过仿真分析和实验结果可以看出,传统的滑模观测器对电机转子的位置检测在低速时抖振现象严重,而模糊滑模观测器在提高观测器的动态性能的同时能有效的抑制低速抖振,从而在永磁同步电机异步拖动起动时,在较低的转速就能有较高的转子位置检测精度,提高了电机起动的成功率和可靠性。理论和实验证明,这种方法能够满足调速范围宽、反电动势系数小的高速永磁同步电机的矢量控制要求。但这种方法也有一定的缺点,由于滑模增益通过模糊控制器的调节作用变成连续增益,因此系统的鲁棒性不能得到很好的保证,因此在抑制转子位置滑模观测器低速抖振的同时如何保证其鲁棒性仍然需要探索。
[1]Sorin Cristian Agarlita.High frequency injection assisted“active-flux”-based sensorless vector controlof reluctance synchronous motors,with experiments from zero speed[J].IEEE Transactions on Industry Applications,2012,48(6):1931-1939.
[2]尹忠刚,刘静,钟彦儒,等.基于双参数模型参考自适应的感应电机无速度传感器矢量控制低速性能[J].电工技术学报,2012,27(7):124-130.Yin Zhonggang,Liu Jing,Zhong Yanru,et al.Lowspeed performance for induction motor sensorless vector control based on two-parameter model reference adaptation[J].Transactions of China Eletrotechnical Society,2012,27(7):124-130.
[3]尹忠刚,张瑞峰,钟彦儒,等.基于抗差扩展卡尔曼滤波器的永磁同步电机转速估计策略[J].控制理论与应用,2012,29(7):921-927.Yin Zhonggang,Zhang Ruifeng,Zhong Yanru,et al.Speed estimation for permanent magnet synchronous motor based on robust extended Kalman filter[J].Control Theory &Applications,2012,29(7):921-927.
[4]Qiao Zhaowei,Shi Tingna,Wang Yindong.New sliding-mode observer for position senseless control of permanent-magnet synchronous motor[J].IEEE Transactions on Industry Electronics,2013,60(2):710-719.
[5]丁文,梁得亮,罗战强.两级滤波滑模观测器的永磁同步电机无位置传感器控制[J].电机与控制学报,2012,16(11):1-10.Ding Wen,Liang Deliang,Luo Zhanqiang.Position sensorless control of PMSM using sliding mode observer with two-stage filter[J].Electric Machines and Control,2012,16(11):1-10.
[6]Hongryel Kim,Jubum Son,Jangmyung Lee.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[7]Su Jianyong,Li Tiecai,Yang Guijie.PMSM sensorless control based on four-order hybrid sliding mode observer [J].Proceedings of the CSEE,2009,29(24):98-103.
[8]李冉,赵光宙,徐绍娟.基于扩展滑模观测器的永磁同步电动机无传感器控制[J].电工技术学报,2012,27(3):79-84.Li Ran,Zhao Guangzhou,Xu Shaojuan.Sensorless control of permanent magnet synchronous motor based on extended sliding mode observer[J].Transactions of China Eletrotechnical Society,2012,27(3):79-84.
[9]申忠宇,赵瑾,顾幸生,等.基于T-S 模型的鲁棒模糊滑模观测器LMI 设计方法[J].中南大学学报 (自然科学版),2009,40(1):43-47.Shen Zhongyu,Zhao Jin,Gu Xingsheng,et al.Design of robust fuzzy sliding-mode observer based on T-S model by LMI approach[J].Journal of Central South University (Science and Technology),2009,40(1):43-47.
[10]王巍,汪玉凤,郭凤仪.基于滑模观测器的 PMSM模糊滑模控制[J].微特电机,2010(8):44-47.Wang Wei,Wang Yufeng,Guo Fengyi.Fuzzy sliding mode control strategy of pmsm based on sliding mode observer[J].Small &Special Electrical Machines,2010(8):44-47.
