磁浮直线感应电机的PI 自适应电流可变转差频率鲁棒控制
2014-11-25陈特放邓江明唐建湘陈春阳
陈特放 邓江明 唐建湘 成 庶 陈春阳
(1.中南大学信息科学与工程学院 长沙 410075 2.中南大学交通运输与工程学院 长沙 410075)
1 引言
单边直线感应电机(Single-sided Linear Induction Motor,SLIM)作为一种不经过中间传动装置,直接产生直线运动推力的具有优良控制性能的驱动设备,已经广泛应用于磁悬浮、地铁、工业机床、电动车门等领域[1]。同时,因为SLIM 结构的特殊性,它初、次级是开断的,分别为:①短初级长次级结构应用于中低速控制领域,如日本的HSST—100L 磁浮系统,我国国防科大的CMS—04 试验线、唐山试验线、西南交通大学试车线[2]等;②长初级短次级结构应用于高速控制领域,如德国的TRANSRAPID 磁浮系统。SLIM 无轮轴和动力的机械转换装置,结构简单、重量轻、体积小、运行可靠,使用起来安静、无摩擦、污染小、散热条件好、爬坡能力强[3]。正因为SLIM 的特有优势和广泛的工程应用价值,加上其结构及场量不平衡的特殊性,其运行的动态控制问题也是一直以来国内外学者的研究热点。
目前国内外针对SLIM 运行控制的研究主要分为两类:
(1)以文献[4-6]为例的相关研究,以SLIM 的d-q 轴等效电路模型为基础,由初级电流与磁链的坐标分解值计算电机的动态电磁推力,进而控制电机的运行速度。此类方法对直线电机的初次级电阻、电感参数要求已知且非时变。由于直线电机定转子开断导致特有的边端效应,使得各类参数存在时变特性[7],尤其是互感参数受入端行波影响较大,在高速时最为严重,增加了跟踪及补偿控制的复杂度。
(2)以文献[8]为例的相关研究,采用了麦克斯韦(Maxwell)电磁场理论分析的方法证明了若控制SLIM 的定子电流与转差频率,就能有效地控制气隙磁场与涡流场,也就能有效控制电机的推力与法向力[9]。这种控制方式因其不依赖直线电机的动态等效参数,如磁链、电阻等,控制方法简单可靠,只需通过检测电机电流与速度量,形成闭环矢量控制,被国内外学者广泛用来控制磁悬浮列车,也即变流转差(Variant-Current Constant Slip-Frequency,VCCSF)控制[10]。
鉴于VCCSF 方式带来最大的问题是在某一恒定转差下只能实现推力和法向力二者中的一个量最优(例如在磁悬浮应用中主要以实现法向力最优),这样,不能充分利用直线电机的额定容量以输出更大推力,从而实现磁浮列车的快速起制动。为解决推力和法向力的电流转差频率协同最优控制问题,本文先分析了最大推力输出的转差频率与过零法向力的转差频率配置,针对两个转差频率点不重合,提出了一种分段变转差频率变电流(Variant Current and Variable Slip-Frequency,VCVSF)控制方法。通过控制转差频率和电流的自适应调整,既能够获得较大的起动制动推力,同时在稳态运行工况下也可以实现法向力最小。此外,为了确保SLIM 在稳态运行时法向力振动的自收敛,以对抗电机内在干扰(各类横向边端效应)和外在干扰(轨道不平顺),本文还建立了以稳态转差频率点波动为其中一个阻尼控制变量的Popov 超稳定模型,通过在线性环节增加前馈补偿器的方式确保等价反馈系统严格正实,从而实现法向力输出对悬浮系统的干扰最小。实验不仅验证了所提控制算法的有效性,还能细化研究SLIM 推力-法向力特性,为磁悬浮的高效动态优化控制提供参考。
2 分段变转差频率控制策略
2.1 推力最优点转差频率配置
因SLIM 开断不对称的结构特点,其在运行控制中存在两类效应:横向边端效应和纵向边端效应。因为中低速磁浮直线电机采用的是多极(单台8 个),五台换位级联拓扑编组的方式运行,而且次级铝导板的宽度大于初级铁心磁场作用的有效宽度,在这种情况下,横向端部效应对级联电机组的影响已很小,国内外学者一般考虑的是与速度相关的动态边端效应对电机力输出特性的影响,并基于场路复量功率相等的原则,提出考虑动态边端效应影响的SLIM 的T 形一相等效电路[4,5,11],如图1所示。
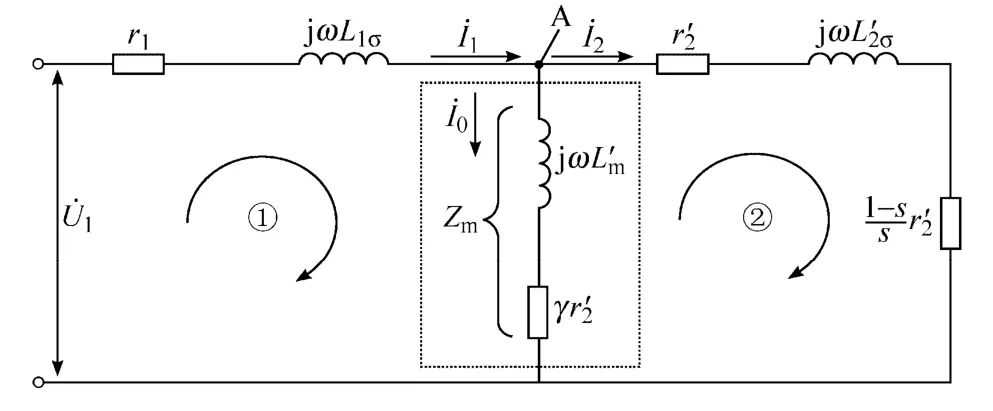
图1 SLIM 的T 形等效电路(Duncan 模型)Fig.1 Duncan equivalent circuit model (ECM) of SLIM
图1 中,电压有效值为U1;r1、Llσ分别为初级电阻、漏感;Lm为互感;ω 为同步角速度,r′2/s 为折算后次级等效电阻;s 为转差;L′2σ为折算后次级等效漏感。因动态纵向边端效应引起的涡流和气隙磁密在电机入端缓慢变化而在出端迅速衰减,故可只考虑入端行波的影响,对其补偿通过修正励磁电抗和在互感回路中串入附加电阻修正能量损耗。其中L′m=Lm(1-γ),γ ˙为Duncan 修正系数[12],计算如下:

式中 l——初级长度;
vm——SLIM 的瞬时速度。
图1 中与速度变量有关的阻抗描述为

其中阻抗模值为

通常r2很小,同时γ<1,故忽略式(3)右边第一项,得

式中,ω=2πf1;f1为同步频率,可得

由图1,根据KVL 电压定律,列写电压回路方程为
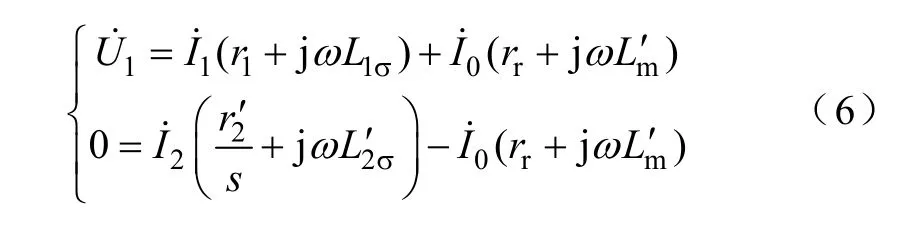
由基尔霍夫电流定理,A 点的相电流满足

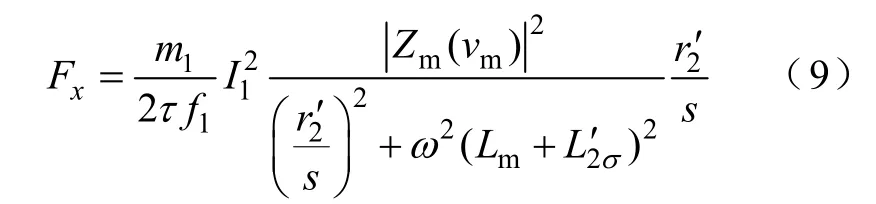
SLIM 同步电磁推力计算如下:

式中 Vs——同步速度,且Vs=2τf1;
τ——极距;
m1——初级绕组相数。
结合式(6)~式(8)可以得出
直线电机转差频率fs计算如下

故式(9)可化为


经验证,由式(10)求得的fs,即为电机输出推力最大时的转差频率,将式(12)代入到式(11)得到相应的最大推力为
式(11)表明,当控制fs为式(12)的值恒定不变时,电机输出最大电磁推力,并且最大推力只与输入电流有关,是输入电流有效值的二次函数。
2.2 法向力最优点转差频率配置
SLIM 在运行过程中,电机初级与次级导电板及铁轭涡流场的斥力、与次级铁轭的吸力形成了电机在运行过程中所受的动态法向力。国内外学者给出了诸多不同法向力的推导与计算式[13-15]。本文引入基于二维多层通用行波理论[7,17]计算的法向力公式如下:
式中 k=π/τ;
D——电机有效宽度;
μ0——真空磁导率,取4π×10-7;
J1——初级行波电流层幅值,且
其中 Nph——每相串联匝数;
kw1——电机绕组系数;
np——单个电机极对数;
G——直线电机的“品质因数”,且
其中eδ'——电机等效气隙;
d——次级导体厚度;
σs——次级导体表面电导率。
由式(10)、式(16),进一步得
由式(14)、式(15)、式(17)可以看出,在其他参数恒定的情况下,若控制SLIM 的初级电流有效值I1和动态转差fs,就可有效控制法向力。
由式(14),令Fy=0,可以得到法向力为零时,转差频率的最优控制点如下:

式中 ρs——次级体积电阻率,ρs=d/σs。
由式(12)、式(18)可知,因SLIM 按照设计方案成型后,推力最优点转差fs,t与法向力最优点转差fs,a通常不相等,有时相差较大。为了证明这一点,通过对一台中低速(时速≤120km/h)磁悬浮用单边短初级直线感应电机的额定设计参数(见表1、表2)进行相应计算。
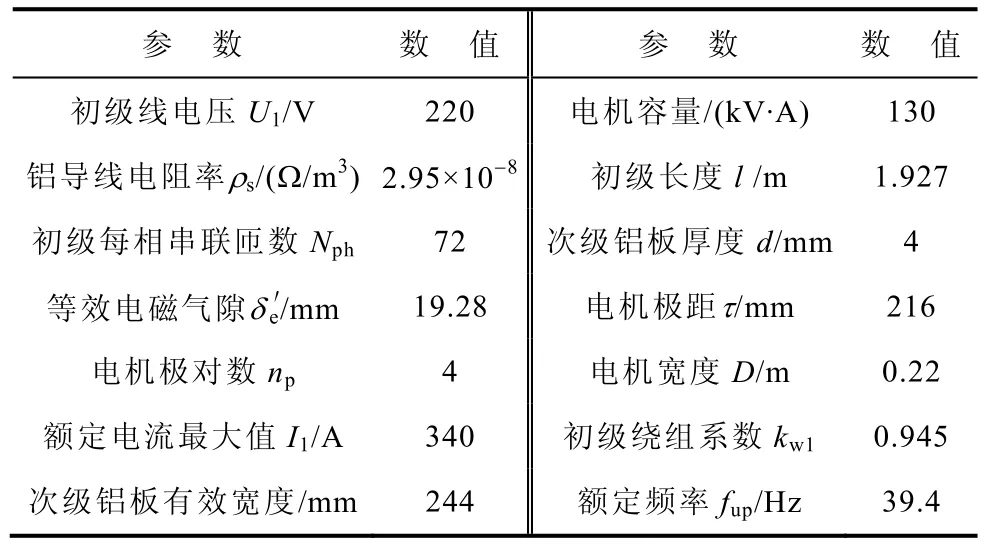
表1 直线感应电机额定设计参数Tab.1 Design parameters of SLIM

表2 SLIM 等效电路参数列表Tab.2 ECM parameter list of SLIM
将表1、2 的各参数代入式(12)、式(18)中可得:fs,t=3.36Hz,fs,a=13.59Hz,显然fs,t≠ fs,a。因此在恒电流变转差频率控制下无法在一个转差控制点实现推力、法向力同步最优,故需研究分段转差频率控制策略,以解决电机推力和法向力协同优化控制问题。
2.3 分段可变转差控制策略
结合式(12)、式(14)的表达式特性,可知SLIM 推力、法向力最优配置特性如图2 所示。
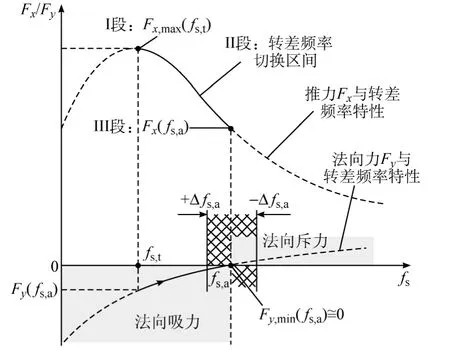
图2 不同转差频率下SLIM 推力/法向力变化特性Tab.2 Analysis of thrust and normal force under the control of variable slip-frequency
若将转差控制分为I、II、III 段,则可控制SLIM在加/减速段运行时,电机工作在某一转差频率点,使得推力输出最优,电机以最短时间加减速;而在恒速段运行时,电机工作在另一转差频率点,使得法向力输出最优,电机在法向不输出对悬浮系统干扰的力矩。具体调节策略如下:
I 段-加速:维持推力最优点的转差频率运行,即控制fs=fs,t<fs,a,SLIM 获得较大的推力和加速度值,在最短时间内加速到指令速度,此段电机的法向力表现为吸力,在中低速磁悬浮方案中,此转差频率下产生的法向力数值相比于该点约30kN 悬浮力还是较小且逐渐削弱,可几乎忽略其瞬态影响。
II 段-转差频率自适应切换:随着速度接近给定速度值时,需控制转差频率以自适应方式切换到电机法向力最优点fs,a,即fs=fs,t→fs=fs,a,以便电机法向力对恒速运行的悬浮系统的冲击扰动最小。
III 段-恒速运行:随着转差频率过渡到fs=fs,a,法向力逐渐降低到零值点(介于法向吸力与法向排斥力之间)附近时,此时维持转差频率在fs,a,法向力在零值点附近波动fs∈{fs-Δfs,fs+Δfs},推力亦下降到一定值后稳定。
3 基于Popov 稳定的PI 自适应控制
当SLIM 应用于中低速磁悬浮列车运行时,在转差频率的自适应调整策略上,要考虑以下两方面:
(1)在垂直方向存在悬浮车体上下自由惯性冲击,因F 轨道曲线特性,即使悬浮系统能在各种振动冲击和电机法向力的影响下保持悬浮稳定,也会引起SLIM 气隙的非线性波动[16]。从式(17)也可看出,sG(fs)是与电机气隙有关的,这样即使控制转差率恒定在法向力最优点,法向力也会随着气隙的变化在零点处非线性波动,从而给悬浮系统带来扰动冲击,尤其当法向力与车体惯性基波发生共振时,严重时会导致悬浮失败。
(2)气隙和加速度类传感器引入的反馈状态控制信息,存在至少一个采样周期的延时[17],加上控制算法计算时间,故自适应鲁棒控制系统的开环至少设计为二阶。
综上考虑,为保证在稳态最优点转差处的法向力非线性振动自收敛,以实现法向力输出对悬浮系统的干扰最小。先建立法向力控制电流ip(t) 与悬浮气隙eδ'(t) 为状态变量的二维状态空间模型,然后取稳态转差频率fs(t) 为其中一个阻尼控制量的Popov自适应模型,则整个控制系统的等价非线性反馈部分分解如下:
(1)线性环节
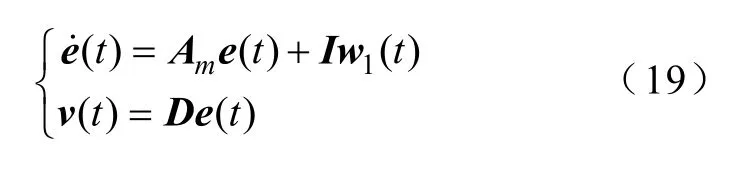
(2)非线性环节
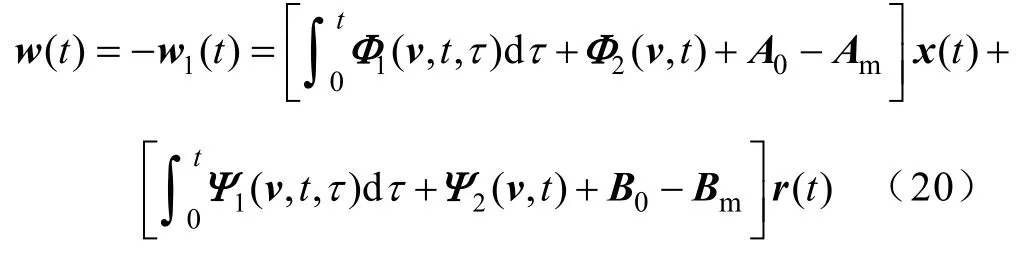
式中,A0、B0为时变参数矩阵的初始值,使式(20)满足Popov 积分不等式的解为
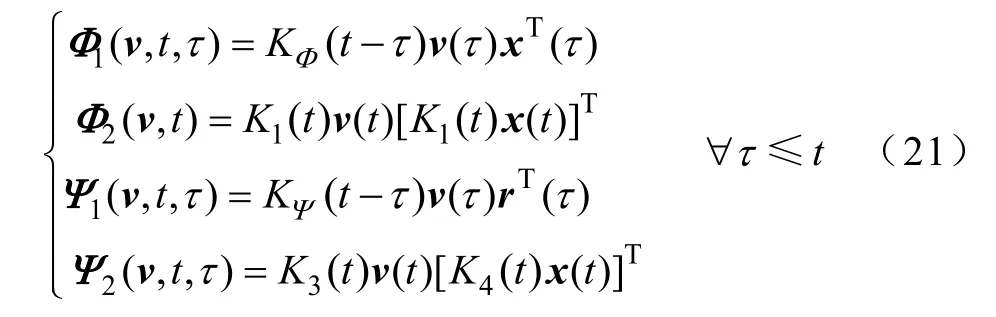
取PI 型正定积分核:KΦ(t-τ)=KΦ>0,KΨ(t-τ)=KΨ>0,Ki(t)=Ki>0,以实现状态矢量x(t)平滑控制。根据超稳定理论,在非线性环节满足Popov 不等式下,要求线性环节严格正实[18],而线性环节状态特性依赖给定的Am,而一般情况下要求Am严格正实是不太现实的,为此在前向通道中设置了线性补偿控制器D,这样即使已知的Am非正实,亦可通过调节D 来保证。整个自适应补偿控制系统结构如图3 所示。
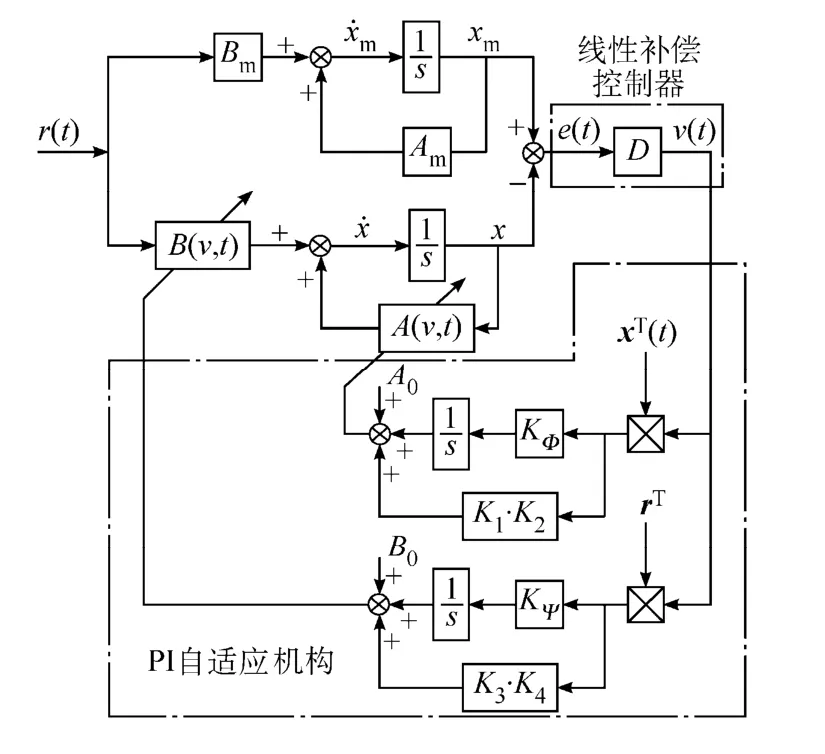
图3 基于状态描述方程的Popov 稳定PI 自适应控制Fig.3 PI adaptive controller based on state space function
式(19)的等价反馈环节的前向矩阵表达式为

而式(21)描述的自适应系统,要求Gv(s) 必须是严格正实。由K-Y 引理[21],必然存在一个对称正定矩阵P 和一个对称正定矩阵Q,使得下式成立

不失一般性,当Q 具有一般对称正定矩阵表达形式,可采用Cholesky 分解,则P=M·M*,其中M 为主对角线上元素全为正的下三角阵,M*为其共轭转置阵,则线性补偿控制器D 求解为
式中,a11>0,a22>0,为M 矩阵主对角元素;Γ为实对称部分。
可知反馈增益ξi影响D 矩阵的值,而D 矩阵的不同值决定了补偿前向通道的比例增益,即决定非线性自收敛速率。
进一步讨论所采用的PI 自适应控制律与传统恒转差频率下的PI 电流控制在系统的时间响应特性上的表现。在理想的恒电流转差频率控制系统中,其二阶离散型输入输出差分表达形式为

而PI 自适应控制律差分表达式为

式中,{yk}表示输出时间序列,{uk}表示控制量采样值序列,k 为当前时刻,k-1 表示上一时刻。ai、bi均为相应的二阶和PI 控制系数,为常量。
对比式(25)、式(26),一旦采样周期T 取值很小时(本文中数据采集周期500μs 远小于控制采样周期100μs),在此时间段内可认为输入量保持着与前一个采样时刻一样的值

则在输出时间序列上,采用本文的控制算法就可少计算了一步反馈状态值ayk-2。即使忽略ayk-2的作用时间,也可通过合理选择积分核参数KΦ、KΨ的值,使得PI 自适应算法在控制时间响应特性上不比传统恒转差PI 电流算法表现差。

图4 实验平台和DSP 控制器内部算法设计Fig.4 Laboratory platform and DSP controller design block diagram
4 实验研究
算法的实用性在一个转向架含两台牵引直线电机的磁浮小车上予以验证,实验平台及控制器结构原理如图4 所示,采用C 语言编程在微处理器DSP–TMS320F2812 上实现所提控制算法;小车支撑轨道结构为F 型轨,表面为厚4mm 的铝板,铁轭为厚28mm 的Q—235 导磁钢材质,牵引用直线感应电机采用双层叠绕的方式,符合JB/T 7823—2007 标准,初级相数为三;最大设计时速不大于120km/h,初级额定电流340A,电机的U、V、W 端连接到IPM逆变器模块输出端,IGBT 开关频率10kHz,悬浮控制采用直流斩波控制器输出可变直流,稳定悬浮间隙在8mm 左右,其中电机的各个参数见表1,实验供电电源±DC750V,考虑到γ 随速度的变化曲线,如图5 所示,电机速度vm升高,SLIM 受动态边端效应的影响,气隙磁场逐渐削弱,式(13)中动态边端效应因子γ 值变大,此时在恒定初级电流340A下,推力则逐步下降。为动态反映式(11)表现的推力受γ 的影响,在控制上既可以通过补偿控制初级注入电流实现,也可以通过补偿转差频率实现,因本文考虑的是变转差频率控制,故采用对转差频率的补偿代替对电流的补偿控制,这样可以维持控制电流在额定值340A 以下运行。综上分析,寻优计算的推力最大转差频率fs,t=3.65Hz(低速区补偿γ-0.29Hz)和法向力过零点转差频率 fs,a=15.65Hz(高速区补偿γ-1.96Hz),逆变器输出最大同步频率fup=39.4Hz,因为测试轨道长小于30m,且小车惯性较大,加速时间和距离较长,从测试安全的角度出发,将小车的速度和加速距离统一折算到一个单位时间(约8.66s),它反映了电机在安全距离内将单位质量加速到给定速度所需的时间。整个测试分为三步:①测试电机在VCCSF 策略下的性能;②测试电机在VCVSF 策略下的性能;③测试电机在法向力为零处电机的受线性补偿矩阵变量 Di的影响法向力振动自收敛特性表现。本文研究的前两步控制分加速段,取控制指令速度v*(3m/s→8m/s)和减速度段,取控制指令速度v*(8m/s→3m/s)予以分析;而最后一步在稳定速度下,控制转差频率恒定在15.65Hz 时加以验证法向力的自收敛特性。

图5 边端效应因子γ 随电机速度变化曲线Fig.5 Eddy-effect factor γ˙ versus motor speed
图6、图7 分别为电机在VCCSF 策略下的电机加速、减速状态下的速度vm、三相电流iabc、转差频率fs、推力Fx和法向力Fy动态波形。从图中可知,在0.2s 时,上位机发出加、减速控制指令,电机随即加、减速。控制在法向力最优点的恒定转差频率15.65Hz 下,电机维持法向力在零值点附近,此时推力最大输出只有约±2 300N,而在PI 电流调节器作用下,电流被限幅输出340A,因为速度上升慢,电流外环调节时间较长,电机的跟踪时间也较长,在一个单位时间里,电机无法以足够的精度跟踪到给定值。
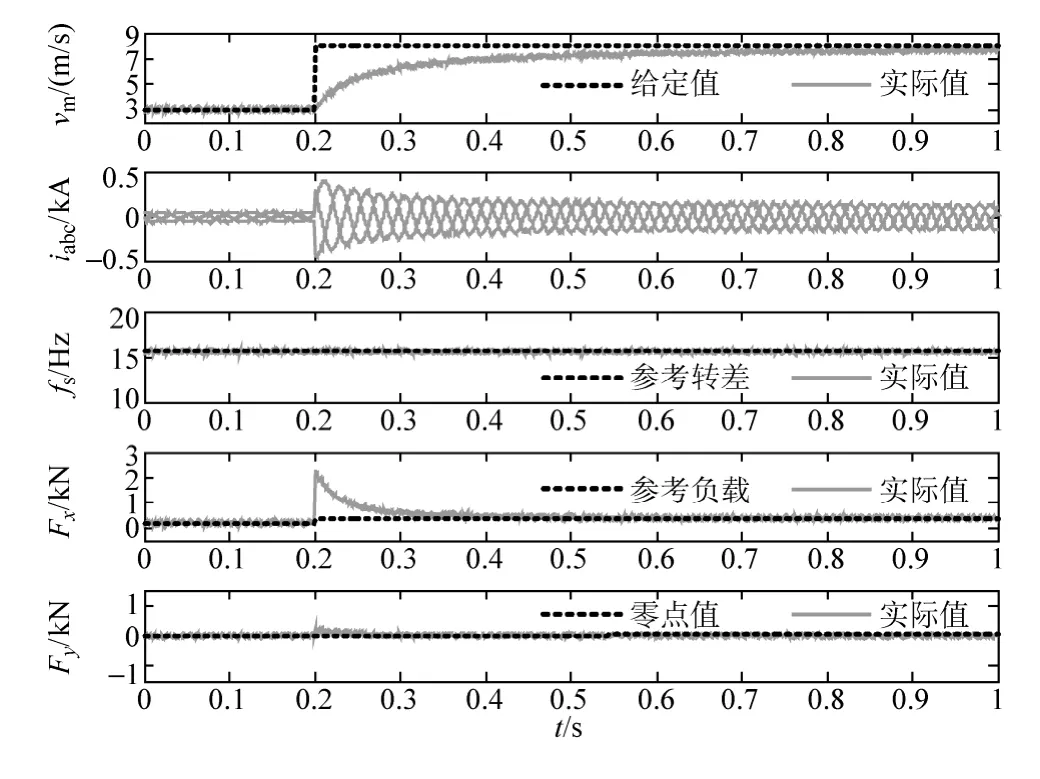
图6 恒转差频率PI 电流调节下各加速动态波形Fig.6 Acceleration waveforms under VCCSF control
图7 恒转差频率PI 电流调节下各减速动态波形Fig.7 Deceleration waveforms under VCCSF control
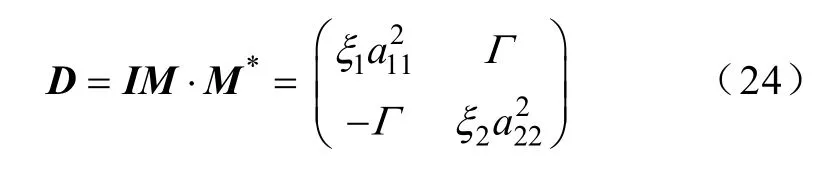
图8、图9 分别为电机在VCVSF 策略下的电机加速、减速状态下的速度vm、三相电流iabc、转差频率fs、推力Fx和法向力Fy动态波形。从图中可知,在0.2s 时,上位机发出加、减速控制指令,电机随即加、减速。在小于0.5 个单位时间里,电机快速跟踪到给定值。因为采用先变转差频率的原则,电机转差频率从15.65Hz 下将至3.65Hz,且先维持电流在最大幅值 340A 处运行,则此时电机产生约4100N 大推力(比VCCSF 策略大了近78%),极大缩短了电机加速时间,而法向力体现为吸力作用,约为1600N,然后随着转差频率上升,逐步下降。当电机速度接近指令值,转差频率以PI 平滑跟踪形式升至15.65Hz,从而继续维持法向力在零值点附近,而推力输出此后在PI 自适应电流调节下,由340A 下降到与负载力矩平衡,完成整个加速/制动过程。
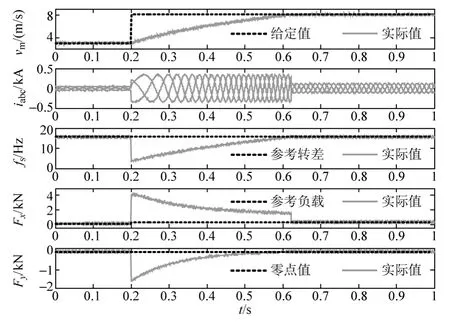
图8 变转差频率PI 电流调节下各加速动态波形Fig.8 Acceleration waveforms under VCVSF control
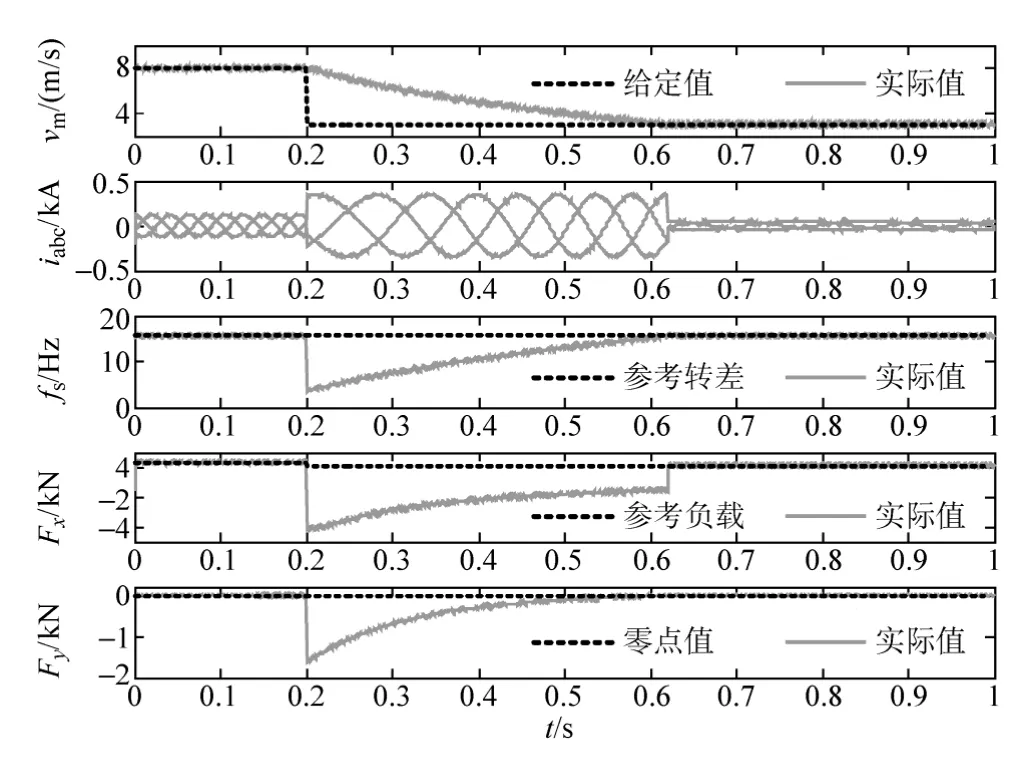
图9 变转差频率PI 电流调节下各减速动态波形Fig.9 Deceleration waveforms under VCVSF control
表3 给出的是两种控制策略下的速度跟踪性能统计,其中阈值点ε=|v*-vm|/v*×100%,本文取ε=10%,ε=5%,ε=1%三个点予以分析,对比表3的数据可以看出,VCVSF 策略在速度跟踪的动态响应上要比VCCSF 策略表现好,是因为变转差频率输出推力比恒转差频率输出的推力大的缘故。
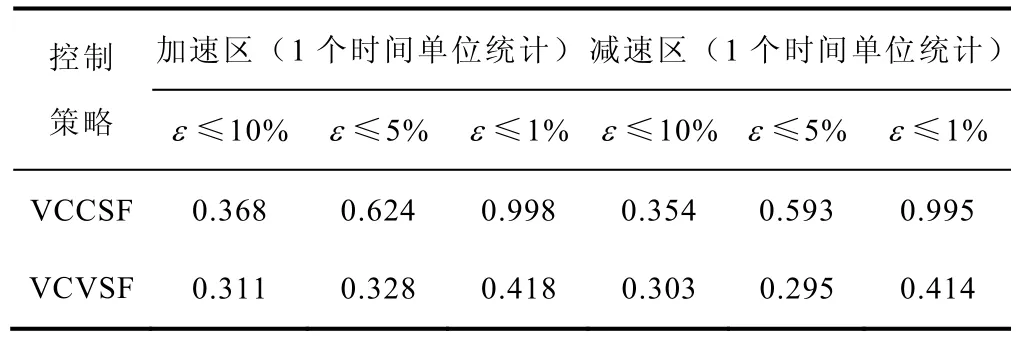
表3 两种控制策略跟踪快速性能统计Tab.3 Tracing performance statistics of studied two algorithms
为了简化PI 积分核参数的整定,根据转差频率和初级电流各自的额定值限制,先取K1=K3=0.075,然后经多次试凑,在相对最好的输出动态特性下,整定得到K2=1.26,K4=16.3。其中,控制采样周期T=100μs,各参数矩阵求解如下:

图10 给出的是电机分别在不同线性矩阵Di控制下,法向力过零转差15.65Hz 处振动自收敛特性。表4 为不同Di下相应的状态量统计,从表中可知,虽然线性补偿矩阵列二范数||D2||2>||D1||2>||D0||2,自适应系统前向通道环节比例增益值越大,转差频率切换阻尼作用大,法向力自收敛速度也越快,但增加了占空比调节宽度,使得转差频率输出波动范围较大,而逆变器的实时频率 f1(t)=fs(t)±|Δfs(t)|+vm/2τ,也加大了IGBT 的切换次数和损耗。故需综合考虑,选取合适的D 参数,既实现快速的法向力自收敛速度,又可保证IGBT 切换次数不至过多,延长其使用寿命。
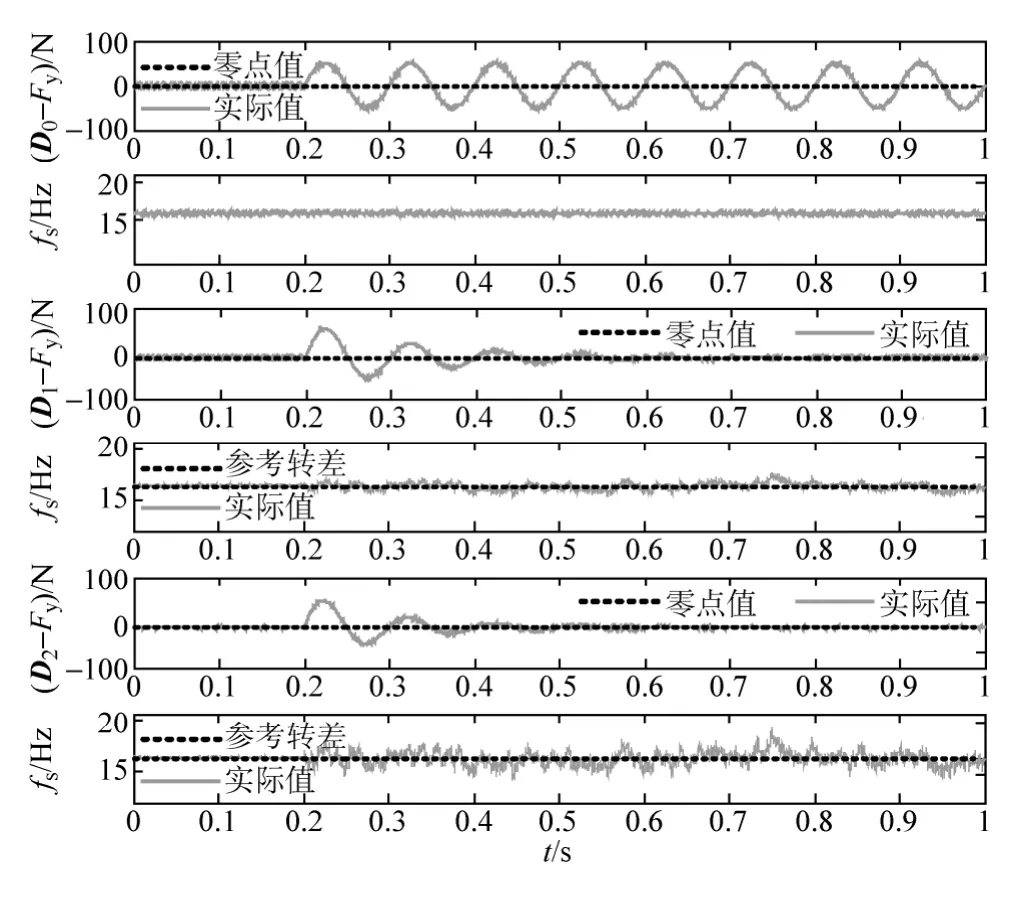
图10 不同线性矩阵Di下的法向力自收敛特性Fig.10 Asymptomatically stable of Fyunder different Di
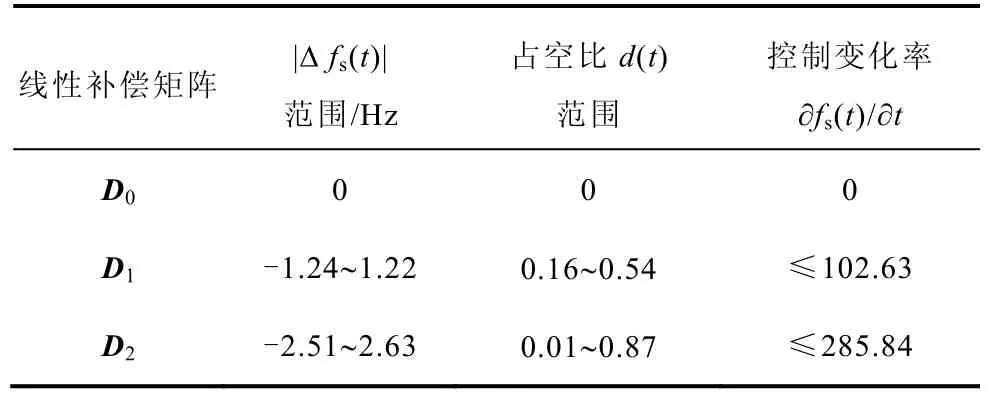
表4 不同矩阵值Di下自适应系统动态控制量r(t)边界特性Tab.4 Boundary performance statistics of control variables r(t) under different linear matrix Di
5 结论
本文研究了一种将磁浮直线电机推力/法向力协同控制的变电流变转差频率控制方法,并通过建立以稳态转差频率为其中一个动态阻尼控制量的Popov 超稳定模型,在反馈线性环节增加补偿器确保等价反馈系统严格正实,从而实现稳态运行时法向力振动的自收敛。理论与实验均验证了所提算法的有效性。以本文的研究为基础,相关学者可以探索出直线电机的优化设计方案,使得推力法向力最优点转差频率两个点能尽可能靠近,这样可解决在一个转差频率点实现推力法向力同步最优的问题。
[1]佟力华,马沂文,胥刃佳.适用于城市交通的中低速磁悬浮技术[J].电力机车与城轨车辆,2003,26(5):4-6.Tong Lihua,Ma Yiwen,Xu Renjia.Medium and low speed maglev technology applicable to urban mass transit [J].Electric Locomotives &Mass Transit Vehicles,2003,26(5):4-6.
[2]李希宁,佟来生.中低速磁浮列车技术研究进展[J].电力机车与城轨车辆,2011,34(2):1-4.Li Xining,Tong Laisheng.Technology research of medium and low speed maglev train[J].Electric Locomotives &Mass Transit Vehicles,2011,34(2):1-4.
[3]Yan L G.Development and application of the maglev transportation system [J].IEEE Transactions on Applied Superconductivity,2008,18(2):92-98.
[4]Faiz J,Jafari H.Accurate modeling of single-sided linear induction motor considers end effect and equivalent thickness[J].IEEE Transactions on Magnetics,2000,36(5):3785-3790.
[5]Kim D,Kwon B.A novel equivalent circuit model of linear induction motor based on finate element analysis and its coupling with external circuits[J].IEEE Transactions on Magnetics,2006,42(10):3407-3409.
[6]Xu W,Jian G Z,Zhang Y C,et al.An improved equivalent circuit model of a single-sided linear induction motor[J].IEEE Transactions on Vehicular Technology,2010,59(5):2277-2289.
[7]龙遐令.直线感应电动机的理论和电磁设计方法[M].北京:科学出版社,2006.
[8]Morizane T,Tsujikawa K,Kimura N.Control of traction and levitation of linear induction motor driven by power source with frequency component synchronous with the motor speed[J].IEEE Transactions on Magnetics,2011,47(10):4302-4305.
[9]Isfahani A H,Ebrahimi B M,Lesani H.Designoptimization of a low-speed single-sided linear induction motor for improved efficiency and power factor[J].IEEE Transactions on Magnetics,2008,44(2):266-272.
[10]Wallace A K,Parker J H,Dawson G E.Slip control for LIM propelled transit vehicles[J].IEEE Transactions on Magnetics,1980,16(5):710-712.
[11]Duncan J.Linear induction motor-equivalent circuit model[J].IEE Proceedings B–Electrical Power Application,1983,130(1):51-57.
[12]Ram P B,Dale R S.Thrust expressions for induction motors thin conducting secondaries[J].IEEE Transactions on Magnetics,1990,26(2):1101-1106.
[13]Laporte B,Takorabet N,Vinsard G.An approach to optimize winding design in linear induction motors[J].IEEE Transactions on Magnetics,1997,33(2):1844-1847.
[14]Lee B J,Koo D H,Cho Y H.Investigation of linear induction motor according to secondary conductor structure [J].IEEE Transactions on Magnetics,2009,45(6):2839-2842.
[15]Kuijpers A A,Nemlioglu C,Sahin F,et al.Force analysis of linear induction motor for magnetic levitation system[C].14th International Power Electronics and Motion Control Conference(EPE-PEMC),2010:17-20.
[16]Itoh K,Kubota H.Thrust ripple reduction of linear induction motor with direct torque control[J].IEEE Transactions on Magnetics,2007,43(5):655-658.
[17]Lin F J,Wai R J,Chou W D,et al.Adaptive backstepping control using recurrent neural network for linear induction motor drive[J].IEEE Transactions on Industrial Electronics,2002,49(1):134-146.
[18]Lian K Y,Hung C Y,Chiu C S,et al.Robust adaptive control of linear induction motors with unknown endeffect and secondary resistance[J].IEEE Transactions on Energy Conversion,2008,23(2):412-421.