基于NNs-MRAS 无速度传感器双馈电机LQR 控制
2014-11-25谭国俊何凤有
刘 毅 谭国俊 何凤有 安 琪
(中国矿业大学信息与电气工程学院江苏省电力传动与自动控制工程技术研究中心 徐州 221008)
1 引言
高动、稳态性能的双馈电机调速控制系统需要安装速度传感器来获得准确的电机转速进行闭环控制[1]。但是,高精度速度传感器价格昂贵,安装维护困难,与此同时,速度信号经信号线传输途中极易串入干扰噪声,降低了速度观测的准确性。倘若观测的速度信息丢失,将直接导致双馈电机磁链与转矩的解耦不彻底,影响控制系统性能,甚至会导致电机的起动电流冲击过大,这将直接损坏变频器及电机。
近年来双馈电机的无速度传感器控制逐渐引起学者们的广泛关注。早期的直接开环计算法,虽然直观性较强,但无任何误差校正环节,电机参数波动对观测的准确性影响突出。针对开环观测方法的不足,文献[2-16]分别提出了不同的闭环观测方法,典型的有基于转矩角、功率角、励磁电流、定子电压、模型参考自适应(MRAS)以及非线性策略的闭环速度观测法。对现有文献进行分析,基于转矩角的闭环观测方法需要对转子电压作积分运算,引入了积分漂移;基于功率角的速度观测方法避免了转子电压的积分运算,但其速度观测受电流内环控制精度的影响;基于励磁电流和定子电压的观测方法,原理简单且控制明了,但其速度观测回路与双馈电机控制回路之间相互耦合,系统设计较为复杂,难以保证其高效性;文献[16]提出了将扩展卡尔曼滤波法应用于双馈电机转速观测,计算量太大,转速估算精度同样受电机参数变化的影响。分析可得,目前具有良好应用前景的双馈电机速度观测方法多基于MRAS,但MRAS 在动态情况下转速辨识的精度会下降[17]。为了弥补MRAS 的不足,本文采用基于定子磁链的神经网络-模型参考自适应(Neural networks-MRAS,NNs-MRAS)速度观测方法,通过偏差反传算法对人工神经网络进行训练,使其具有良好的参数辨识能力,能够有效实现双馈电机转速的观测。
与此同时,在双馈电机控制系统中,多采用基于矢量控制的双闭环结构,决定系统控制效果的内环控制器多为传统的PI 控制器,而PI 控制器仅考虑了系统在某一运行状态附近的稳态模型,忽略了其瞬态特性,其动态响应较慢。鉴于该系统具有变量多、耦合性强的特点,同时速度观测模型是一个动态变化的子系统,此时,PI 参数难于整定,因此如何实现控制器参数的优化设计成为了学者研究的热点之一。基于线性二次型最优控制算法(LQR)的控制器具备控制目标明确、实现简单、动态性能好等优点,广泛应用于有源电力滤波器控制[18]、风力发电桨距控制[19]、笼型电机调速控制[20]等领域,本文以双馈电机为控制对象,设计了LQR 控制器,实现了内环控制器的最优设计,改善了系统的动、静态性能。最后,基于样机试验平台进行了验证性实验分析,证实了所述控制策略的有效性和可实现性。
2 NNs-MRAS 速度观测模型
神经网络-模型参考自适应(NNs-MRAS)速度观测模型如图1 所示,图中,u 为NNs-MRAS 速度观测模型输入量,X 和ˆX 为具有相同物理意义的状态量,ε 为状态量的偏差值。NNs-MRAS 速度观测方法源于MRAS 转速估测法,将不含转速信息的数学方程作为MRAS 的参考模型,而可调模型为神经网络(NNs)模型,参考模型与NNs 模型的输出量具有相同物理意义,基于两个模型输出量获得的偏差信息量经反传算法输出。电机固有参数以神经网络权值wi(i=1,2,3…)的形式在该方法中体现出来,并以此进行转速估计。该速度观测方法无需提前进行网络的离线学习与训练,只要经过必要的在线学习,便可实现对转速的辨识估计。
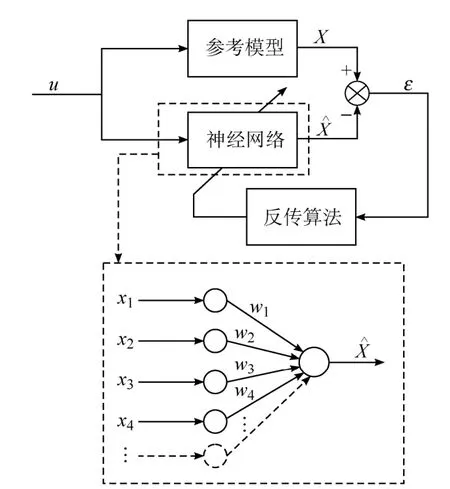
图1 神经网络速度观测原理框图Fig.1 Schematic diagram of neural networks speed observation
基于定子磁链的NNs-MRAS 速度观测法来实现双馈电机转速的估测,NNs 速度观测模型可由双馈电机在两相静止坐标系下的数学模型得到,定子磁链的电压模型和电流模型的矩阵表达式如下所示:
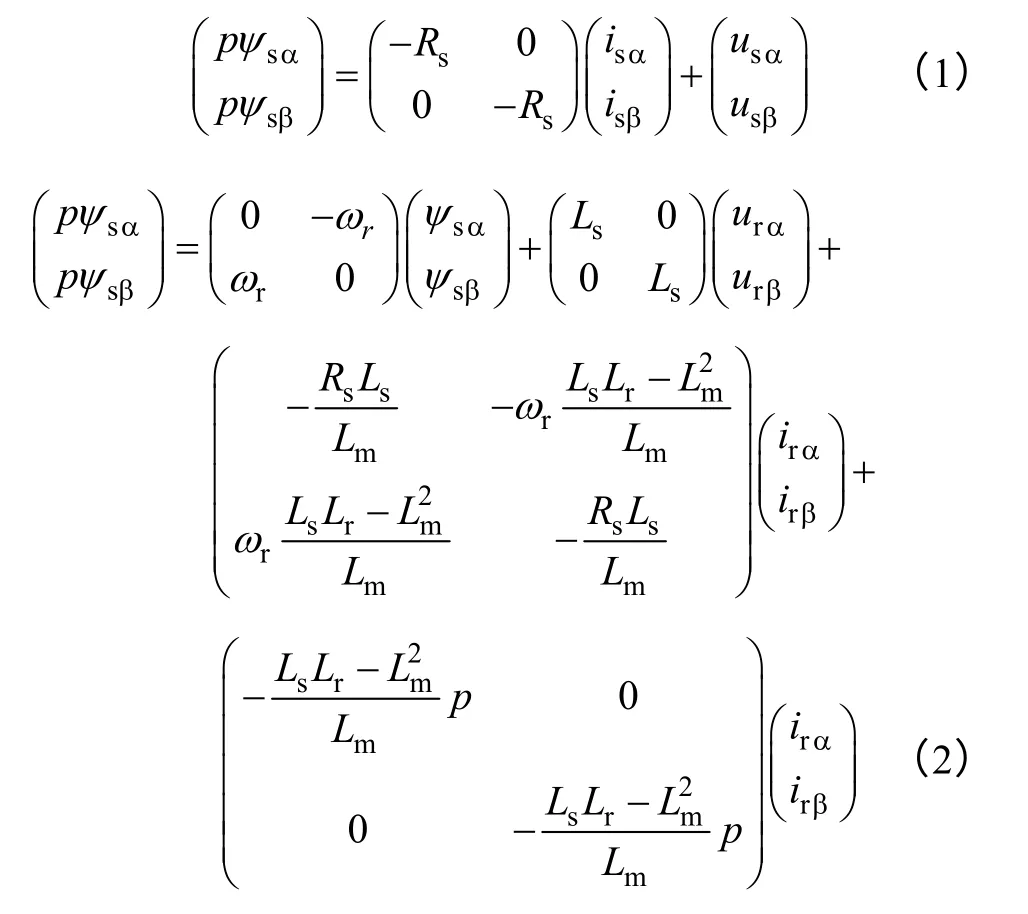
将式(1)所示不含待测物理量ωr的电压模型作为NNs-MRAS 速度观测法的参考模型,而NNs模型用式(2)所示电流模型表示。考虑到参考模型由双馈电机在两相静止坐标系下的数学模型得到,若采用纯积分容易引起直流偏移及积分饱和等问题,本文采用一阶低通滤波器级联的形式替代纯积分。在NNs-MRAS 速度观测模型中,假设双馈电机参数恒定,分析待观测物理量ωr和NNs 模型输出定子磁链ψs。为分析方便,现将式(2)所示NNs 模型进行变换,分离出含有转速观测信息ωr的表达式

基于后项差分法对式(3)进行离散化处理,得到构建NNs 模型的离散化方程,如下:
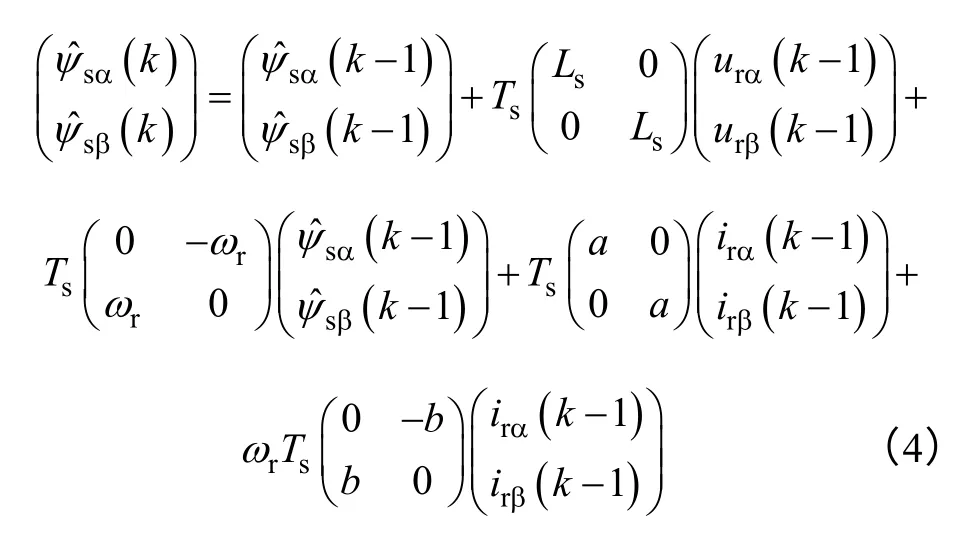
式中 Ts——采样周期;
a=-Ls(Rs+Lr)/Lm+Lm+1;
b=LsLr/Lm-Lm。
将式(4)写成神经网络单元形式,有

式中 xi(i=1,2,3,4,5)——NNs 模型的状态变量;
wi(i=1,2,3,4,5)——状态变量对应的权系数;


至此可构建NNs 模型,如图2 所示,五个输入节点分别表示定子磁链、转子电流及转子电压的前一采样时刻的离散数值,权值w2和 w4分别同双馈电机转速成线性比例关系,NNs 模型输出为当前采样时刻的定子磁链估测值。
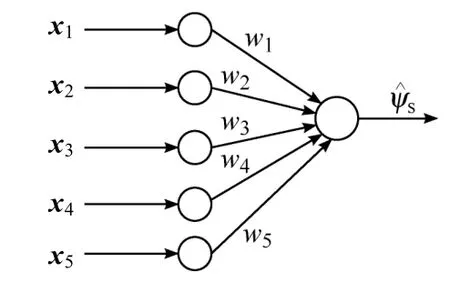
图2 NNs 模型Fig.2 Neural networks model
结合MRAS 控制思想,通过调整NNs 模型的权值,使 NNs 模型和参考模型输出的定子磁链相等,则双馈电机转速估测值和实际值相等。假设NNs 模型和参考模型输出不等,定义状态广义偏差为e(k),定义误差函数为J,有
与双馈电机转速信息相关的权值调整式为

结合方程式(4)~式(9)整理可得
权值w2和w4均和待观测的转速信息成简单的线性关系,均方便由权值w2和w4得到转速估测信息。考虑到权值w4的调整不仅涉及到转子动态电流,还涉及双馈电机的转子参数,不利于速度观测的准确性,本文采用权值w2进行转速估测,估测的转速值如下式所示:
3 双馈电机LQR 控制
3.1 LQR 控制器设计
考虑电网为无穷大电网,电网电压幅值和频率恒定,并且电机定子磁链定向准确且恒定,结合两相旋转坐标系下的双馈电机数学模型,可将双馈电机内环控制的数学模型表示成离散形式的矩阵方程式


为保证控制系统的动态特性,引入输出变量误差函数(es),以此对矩阵方程式(13)进行增扩,定义的输出变量误差函数为
结合式(13)、式(14),设计状态变量的增扩矩阵方程式为
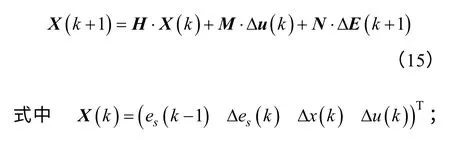
定义控制系统的目标函数为

式中,加权矩阵Q≥0,ℜ >0,并且有
LQR 最优设计需要设计出状态反馈控制器,从而使二次型目标函数J 取最小值,而状态反馈控制器由加权矩阵Q 与ℜ 唯一决定。设计LQR 控制器的最优控制律为
状态反馈控制器的前向增益为

P 矩阵可在Matlab 环境下求解Riccati 方程式得到,Riccati 方程式如下式所示:

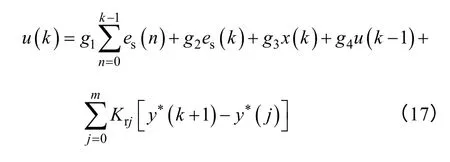
进而解得输出变量误差增益Krj为

综上,可以设计LQR 控制器,如图3 所示。
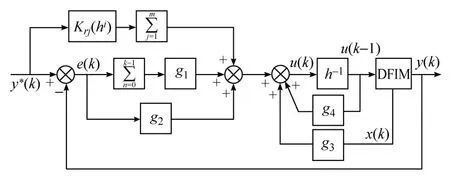
图3 LQR 控制器结构框图Fig.3 Structure of LQR controller
3.2 双馈电机LQR 控制系统
双馈电机调速是通过控制其转子电流矢量,使转子端电压矢量可控,进而实现对其定子电流的矢量控制,以达到电磁转矩和功率控制的目的。在控制系统设计中,双馈电机控制系统的输入变量矩阵u=(urdurq)T,其输出变量矩阵y=(irdirq)T,结合图3 设计的LQR 控制器,可以得到双馈电机LQR 控制系统如图4 所示,转速外环的反馈量为基于NNs-MRAS 速度观测模型的转速观测量,转速外环的输出偏差经PI 控制器作为双馈电机转矩分量给定,系统无功功率的要求可通过转子电流励磁分量给定实现,内环采用设计的LQR 控制器实现电流的最优控制,以此保证控制系统良好的动态性能。
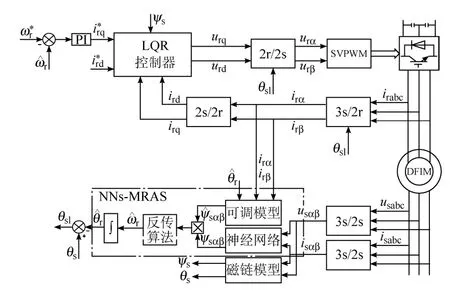
图4 双馈电机LQR 控制系统框图Fig.4 Structure of DFIM control system based on LQR
4 实验验证
为了验证所述方法的可行性,搭建了基于DSP2812 控制器的双馈电机调速样机实验平台进行实验验证,实验采用的双馈电机的参数见下表,在LQR 控制器中,q1=1,q2=1 000,q3=q4=2 000,r1=r2=4。
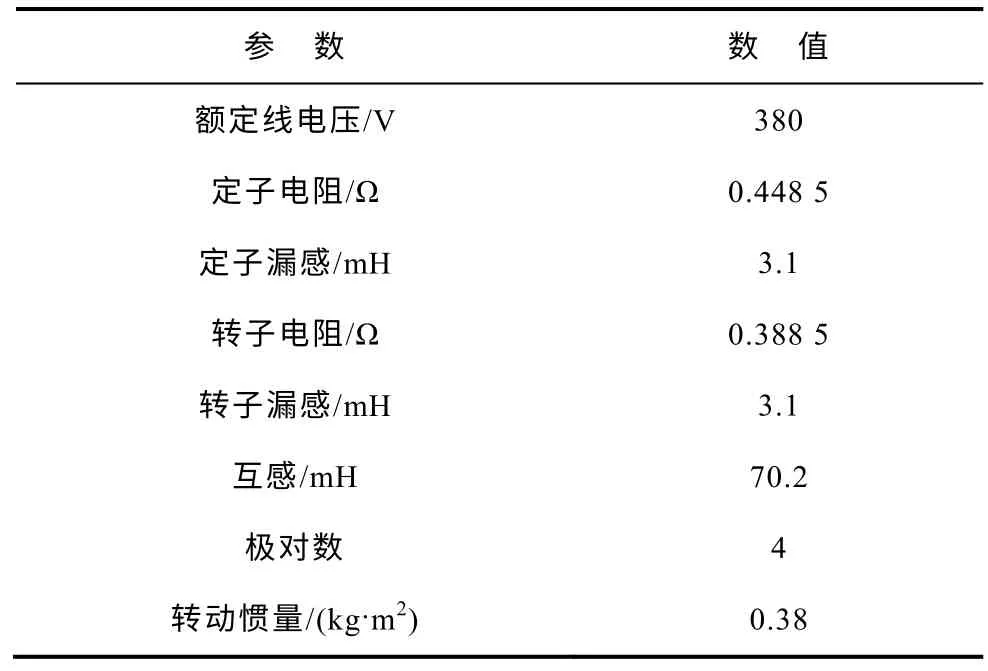
表 双馈电机主要参数Tab. Main parameters of DFIM
受样机实验平台的功率开关器件容量所限,实验时,变流器电网侧电压通过三相变压器转换为60V。采用LQR 控制器,双馈电机稳定运行条件下,有功电流给定阶跃变化时,双馈电机转子电流动态响应波形如图5 所示波形由DSP2812+FPGA/CPLD电机控制板上D-A 通道经Agilent MSO6014A 示波器测得。可见,采用LQR 控制器,能够实现了内环电流的有效解耦及快速动态响应,使系统具备良好的动、稳态性能。
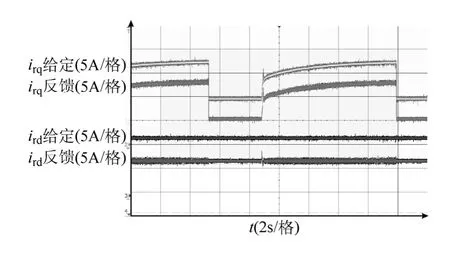
图5 双馈电机转子电流波形Fig.5 Waveforms of DFIM rotor currents
在双馈电机 LQR 控制的基础上,投入 NNs-MRAS 速度观测模型,双馈电机给定转速为80rad/s,双馈电机转子位置角及转速观测波形如图6 所示,实际转速数据由光电编码器获得。
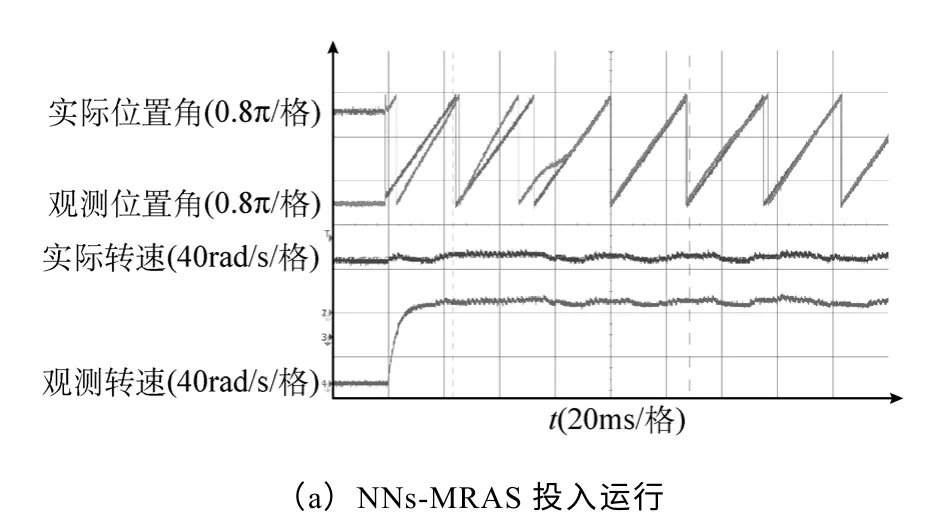

图6 双馈电机转子位置角及转速观测波形Fig.6 Waveforms of DFIM rotor angles and speed
双馈电机从亚同步速到超同步速的加、减速过渡过程的实验波形图7 和图8 所示。图7 所示为双馈电机从亚同步速到超同步速的升速过程,图8 为双馈电机从超同步速到亚同步速的减速过程。
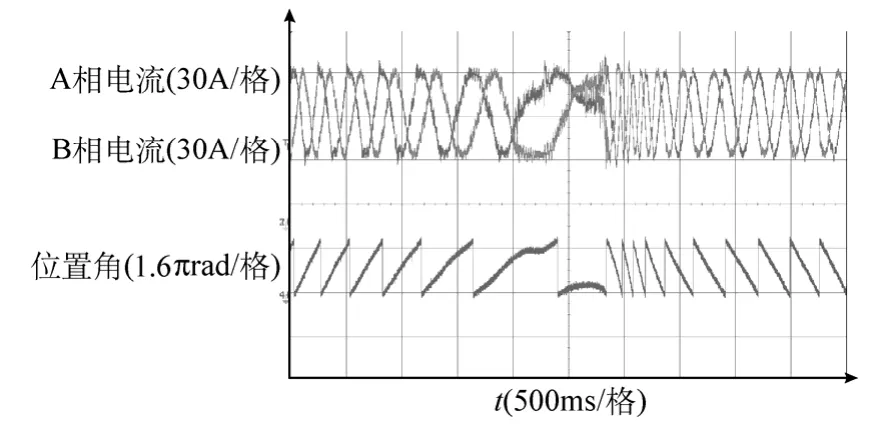
图7 亚同步速到超同步速升速过程双馈电机电流波形及转子位置角Fig.7 Waveforms of DFIM rotor currents and rotor angle when speed changed from subsynchronous to supersynchronous

图8 超同步速到亚同步速降速过程双馈电机电流波形及转子位置角Fig.8 Waveforms of DFIM rotor currents and rotor angle when speed changed from supersynchronous to subsynchronous
由图6~图8 所示,双馈电机在稳态运行及转速动态变化的过程中,采用基于NNs-MRAS 的速度观测方法能较好的对双馈电机转速进行跟踪及观测,稳态时,观测值良好跟随电机实际转速,几乎无误差;双馈电机的转速在亚同步速和超同步速之间动态变换过程中,转子电流正弦度较好,且能较好的观测转子位置信息,即便在同步速附近,双馈电机转子位置信息也没有丢失,双馈电机控制性能良好,体现了所述控制策略的有效性。
5 结论
针对双馈电机无速度传感器控制,提出了基于定子磁链的神经网络-模型参考自适应系统(NNs-MRAS)速度观测方法,设计了神经网络模型,通过偏差反传算法对神经网络模型进行训练,有效的实现了双馈电机转速的观测。设计了基于线性二次型最优控制算法的控制器(LQR),该控制器实现简单、动态性能好,可实现内环转子电流的最优控制,改善了整体控制系统的动、稳态性能。
[1]Mohammed O A,Liu Z,Liu S.A novel sensorless control strategy of doubly fed induction motor and its examination with the physical modeling of machines[J].IEEE Transactions on Magnetic,2005,41(5):1852-1855.
[2]Xu Longya,Cheng Wei.Torque and reactive power control of a doubly-fed induction machine by position sensorless scheme[J].IEEE Transactions on Industrial Application,1995,31(3):636-642.
[3]刘志强,王娜,魏学森.无速度传感器转子电流定向双馈电机的矢量控制调速系统[J].中小型电机,2002,29(6):38-42.Liu Zhiqiang,Wand Na,WeiXuesen.Speed variable vector control system of doubly fed motor without speed sensor based on rotor current oriented[J].S&M Electric Machines,2002,29(6):38-42.
[4]Iwanski G,Koczara W.Sensorless direct voltage control of the stand-alone slip-ring induction generator[J].IEEE Transactions on Industrial Electronics,2007,54(2):1237-1239.
[5]Jain A,Ranganathan V.Wound rotor induction generator with sensorless control and integrated active filter for feeding nonlinear loads in a stand-alone grid[J].IEEE Transactions on Industrial Electronics,2008,54(1):218-228.
[6]Forchetti D,Garcia G O,Valla M I.Sensorless control of stand-alone doubly fed induction generator with an adaptive observer[C].In Proc.of IEEE International Symposium on Industrial Electronics,Cambridge,U.K.,2008:2444-2449.
[7]Pena R S,Cardenas R,Proboste J,et al.Sensorless control of doubly-fed induction generators using a rotor-current-based MRAS observer[J].IEEE Transactions on Industrial Electronics,2008,55(1):330-339.
[8]Forchetti D G,Garcia G O.Adaptive observer for sensorless control of stand-alone doubly fed induction generator[J].IEEE Transactions on Industrial Electronics,2009,56(10):4174-4180.
[9]Cardenas R,Pena R,Clare J,et al.MRAS observers for sensorless control of doubly-fed induction generators[J].IEEE Transactions on Power Electronics,2009,23(3):1075-1084.
[10]Yuan Guofeng,Li Yongdong,Chai Jianyun,et al.A novel position sensor-less control scheme of doubly fed induction wind generator based on MRAS method[C].In Proc.of IEEE Power Electronics Specialists Conference,2008:2723-2727.
[11]Carmeli M S,Castelli Dezza F,Iacchetti M,et al.Effect of the errors in the rotor position estimation on the stability of a double fed induction motor where the mechanical quantities are estimated by a MRAS[C].International Symposium on Power Electronics,Electrical Drives,Automation and Motion,2008:1233-1238.
[12]Krzeminski Z,Popenda A,Melcer M,et al.Sensorless control system of double fed induction machine with predictive current controller[C].In Proc.of 9th European Conference on Power Electronics and Applications,2001:3-9.
[13]Shen B,Ooi B.Novel sensorless decoupled P-Q control of doubly-fed induction generator(DFIG)based on phased locking to γ-δ frame[C].In Proc.of IEEE Power Electronics Specialists Conference,2005:2670-2675.
[14]秦涛,吕跃刚,肖运启,等.基于模型参考自适应的无速度传感器双馈风力发电机组控制技术研究[J].现代电力,2008,25(4):64-70.Qin Tao,Lü Yuegang,Xiao Yunqi,et al.Speedsensorless control strategy of induction motor for doubly-fed wind power generation system based on MRAS observer[J].Modern Electric Power,2008,25(4):64-70.
[15]Cardena R,Pena R,Proboste J,et al.MRAS observer for sensorless control of stand-alone doubly fed induction generators[J].IEEE Transactions on Energy Conversion,2005,20(4):710-718.
[16]Eric Maldonado,Cesar Silva,Manuel Olivares.Sensorless control of a doubly fed induction machine based on an extended Kalman filter[C].In Proc.of 14th European Conference on Power Electronics and Applications,2011:1-10.
[17]陈伯时,杨耕.无速度传感器高性能交流调速控制的三条思路及其发展建议[J].电气传动,2006,36(1):3-8.Chen Boshi,Yang Geng.Three approaches to the control strategies of sensorless high-performance ASD systems and proposals for their development[J].Electric Drive,2006,36(1):3-8.
[18]Bachir Kedjar,Kamal Al Haddad.DSP-based implementation of an LQR with integral action for a three-phase three-wire shunt active power filter[J].IEEE Transactions on Industrial Electronics,2009,56(8):2821-2828.
[19]Li Jianlin,Xu Hongyan,Zhang Lei,et al.Disturbance accommodating LQR method based pitch control strategy for wind turbines[C].Second International Symposium on Intelligent Information Technology Application,2008:766-770.
[20]Osama S,Ebrahim Praveen.LQR-based stator field oriented control for the induction motor drives[C].Applied Power Electronics Conference and Exposition,2008:1126-1131.
