便携式甚小口径地球站快速寻星技术研究*
2014-11-18李圣明马利华
胡 超,庞 峰,李圣明,马利华
(1.中国科学院 国家天文台,北京 100012;2.中国科学院大学,北京 100049)
0 引言
近年来,全球自然灾害频频发生,快速与灾区建立稳定、可靠的通信通道是开展救援工作的关键所在[1]。卫星通信覆盖范围广,信道条件好,特别是随着卫星宽带技术的发展,基于FSS(fixed satellite service)频段的移动平台地球站在抗灾减灾活动中得到了大量的应用[2-3]。根据开展通信业务时地球站所处的运动状态,移动平台地球站大体可以分为“静中通”和“动中通”两类。便携式甚小口径(PVSAT)地球站具有快速部署、机动灵活和性价比高的特点,拥有巨大的市场潜力和应用前景。重量、通信成本和建立星站通信链路的快速性是衡量PVSAT 性能的主要参数,其中,建立星站通信链路的速度和精度是决定PVSAT 通信快速响应性能的关键参数。常见的PVSAT 地球站寻星设计,一般需要将地球站放在一个较平的地面上,或者通过调平机构将天线座架调平,进而结合平面电子罗盘来实现寻星[4]。调平过程增加了用户的操作量,降低了地球站的寻星速度;同时调平机构也增加了地球站的重量,影响了其便携性。
随着数字信号处理技术的飞速发展,数字捷联平台成为最流行的虚拟水平台。数字捷联平台一般由惯性器件相组合搭建而成[5],考虑到PVSAT 地球站系统的工作状态,本研究采用低成本加速度计和磁场计组成了三维电子罗盘,并以罗盘为基础搭建一个数字捷联平台。基于AEP(azimuth elevation polarization)型天线座架,笔者提出基于数字捷联平台的快速寻星方法。该方法对PVSAT 站放置点的倾斜度没有要求,并省去调平机构,可以大大减轻地球站的重量,同时简化用户寻星操作,极大地缩短建立星站通信链路的时间。
1 AEP 型天线座架指向系统工作原理
三轴AEP 型天线座架是移动平台地球站常用的一种座架形式,配有调平机构的天线指向系统硬件基本架构如图1 所示。调平机构一般由水准泡和3个高度可调的支腿组成,通过不断调整3个支腿的高度,将气泡调节至水准泡表盘中央,从而实现将天线座架调成水平状态的功能。
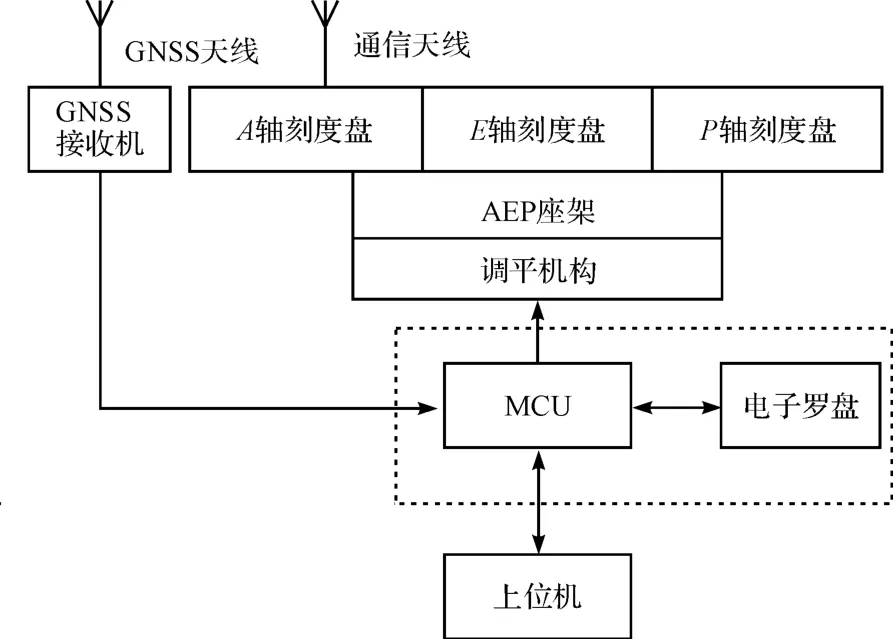
图1 配有调平机构的AEP 座架天线指向系统硬件架构
本节以配有调平机构的AEP 型座架为例,简单分析了带有调平机构的PVSAT 的寻星原理,并在此基础上研究了数字捷联平台便携式PVSAT 地球站的快速寻星实现方法。
1.1 调平机构PVSAT 地球站寻星原理
PVSAT 站天线座架处在水平状态时,若PVSAT 站天线指向GEO 通信卫星,则天线与卫星的几何夹角关系如图2 所示。本研究用(AN,EN,PN)分别表示图2中天线的方位角、俯仰角和极化角。以下简单给出3个角的计算公式:
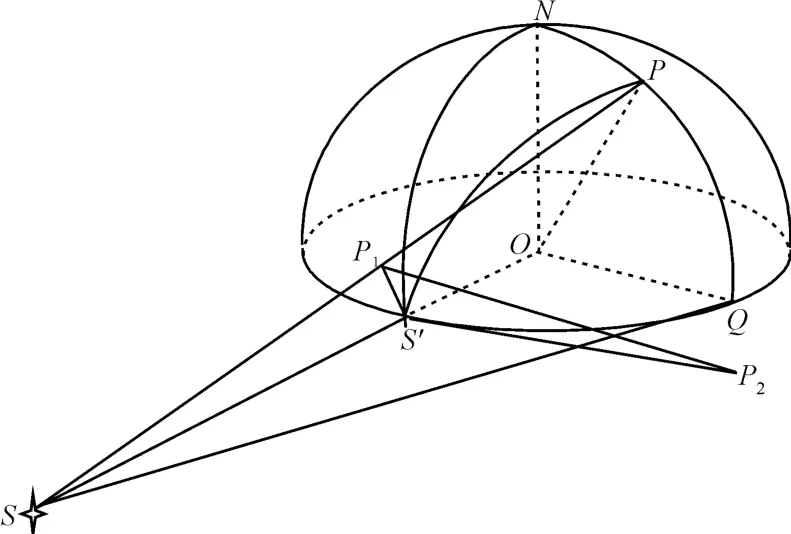
图2 地球站和GEO 卫星的空间几何关系
在球面三角形△NPS'中,∠NPS'与天线的方位角AN存在简单的三角关系,求得∠NPS'即可求出天线的方位角AN。在△OPS 中,∠OPS 可以表示为俯仰角EN与π/2 的和。由球面天文学知识,可以求得AN和EN的计算公式。
OS'Q 平面为赤道面,S'P1和S'P2为过S'的球面切线,S'P2在赤道平面内。S'P1与SP 交于点P1,则P1P2⊥S'P1,且交S'P2于点P2,又SS'平面⊥S'P1P2,P1P2平面⊥OSP,则P1P2⊥OP,有P1P2平行于P 点所在地平面。又P1P2⊥SP,则P1P2与接收天线的馈源矩形波导口窄边的方向一致,则∠P1P2S'即为极化角PN。在球面直角三角形△QPS'中,根据正弦定理可以得到PN的计算公式。
综上所述,可以得到天线座架调平后,PVSAT 站的天线波束指向卫星时,AEP 型天线座架方位角、俯仰角和极化角的计算公式,如下所示[6]:

因此,对于配备了调平机构的PVSAT 地球站(如图1 所示),在调节地球站通信天线指向和极化前,需要先将AEP 型天线座架调至水平状态。天线座架调平后,可对PVSAT 站系统上电,卫星导航系统(GNSS)接收机采集站点经纬度位置信息(λE,φE),并发送至微控制单元(MCU);MCU 查询GEO 通信卫星的星下点经度和纬度位置(λs,0)。MCU 根据公式(1)计算卫星在站心坐标系(地理坐标系)中的方位角AN、俯仰角EN和极化角PN。对于配置了平面电子罗盘的地球站,用户读取AEP 型座架方位轴、俯仰轴和极化轴度盘读数(Aax,Eax,Pax),可以通过手动进一步将天线座架A、E、P 三轴度盘读数调整为(-AN-Aax,EN,PN)来完成寻星工作。对于没有配置平面电子罗盘的地球站,可以先将天线的俯仰轴角和极化轴角调成(EN,PN),然后在全向范围内搜索卫星通信信号的信噪比极大值来实现寻星。
1.2 基于数字捷联平台的PVSAT 地球站寻星原理
调平过程增加了用户的操作量,而数字捷联平台的出现,使得软件平台实现调平机构的功能成为可能。数字捷联平台实际上是用数学方法搭建了一个虚拟的水平台,要求AEP 型天线座架中的电子罗盘更换为带有倾角测量功能的三维电子罗盘。整体的架构如图3 所示。

图3 数字捷联平台AEP 型座架天线指向系统硬件架构
下面,本研究以北半球地球站寻星为例,推导数字捷联平台寻星的工作原理。笔者将便携式PVSAT 地球站放在地面上并上电,GNSS接收机采集站点地理位置信息(λE,φE),由加速度计和磁场计组成的三维电子罗盘采集站点的航向角(ψ)和姿态角(θ,γ)信息,并发送至MCU。根据内置的GEO 通信卫星星下点位置信息(λs,0),结合搭建的数字捷联平台,MCU 直接解算出体坐标系下天线波束指向卫星时,AEP 天线座架的3 轴度数,并通过上位机直观显示座架3个轴需要调整的增量度数(ΔAC,ΔEC,ΔPC)。
数字捷联平台寻星的工作流程框图如图4 所示。
以下推导为实现数字捷联平台寻星的数学过程,为了讨论问题的一致性,本研究首先给出推导所需要的坐标系和姿态角的定义。
(1)地理坐标系N。又称站心坐标系,以载体重心O 为原点,N 轴正向指向地理北,E 轴正向指向地理东,D 轴垂直指向地心,与N 轴和E 轴构成一个正交右手系。在简单重力模型下,重力场指向地心,重力场矢量和地理坐标系的D 轴重合。
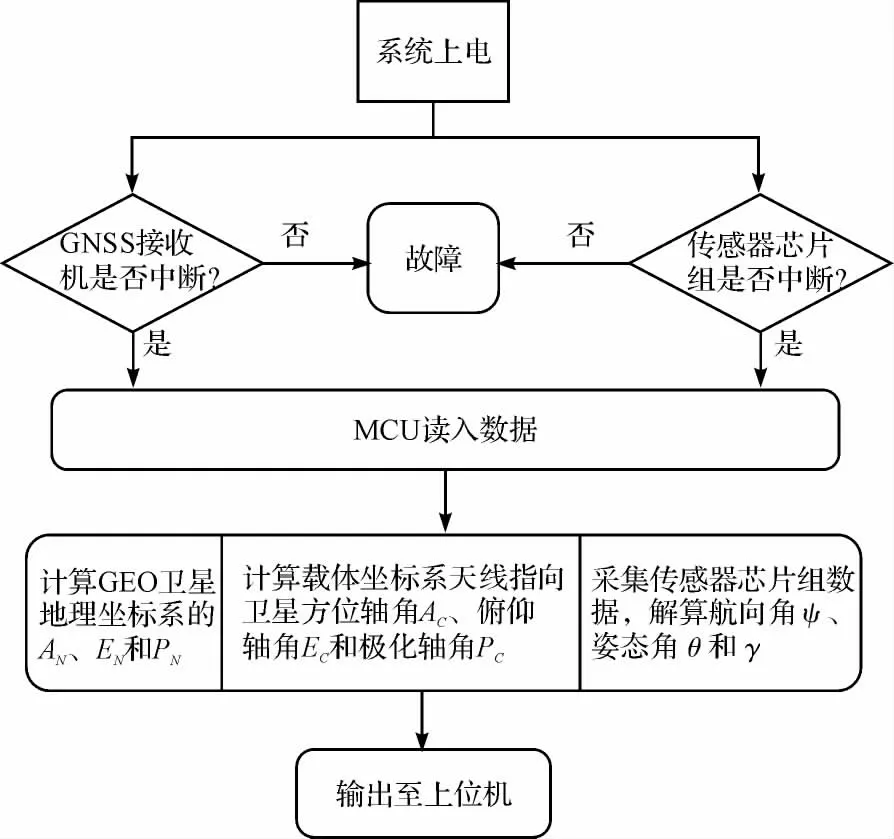
图4 数字捷联平台寻星工作流程
(2)地磁场坐标系M。原点和地理坐标系原点O重合,i 轴正向指向磁北极,j 轴正向指向磁东,k 轴和地理坐标系的D 轴重合,正向指向地心,与i 轴和j 轴构成一个正交右手系。地磁场坐标系和地理坐标系存在一个固定旋转角度关系,该旋转角就是地磁偏角α[7]。地磁偏角α、地磁倾角I和地磁总场B 构成描述地磁场矢量的三要素。
地磁场矢量和地磁场坐标系的关系如图5 所示。
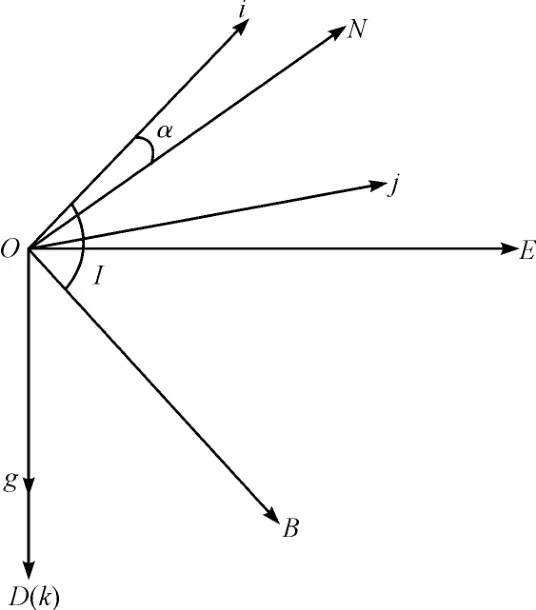
图5 地理坐标系、地磁场坐标系示意图
(3)体坐标系B。原点O和地理坐标系的原点O重合,3个坐标轴和载体固连在一起,OXB轴和载体纵轴重合,正方向指向前进方向,OYB轴正向指向载体前进方向右侧,OZB轴和OXB轴、OYB轴构成正交右手系。对于角位移来说,体坐标系的x 轴为滚动轴,y 轴为俯仰轴,z 轴为偏航轴。
结合上述坐标系,以下给出严格意义的地球站航向角和倾斜角定义[8]:
①航向角。载体纵轴(x 轴)在水平面内的投影和地理北的夹角,载体右偏航为正;
②俯仰角。载体纵轴(y 轴)与水平面的夹角,载体头部向上为正;
③横滚角。沿航向(x 轴正向)看去,绕载体的纵轴(x 轴)向右旋转为正,反之为负。
俯仰角和横滚角统称为倾斜角,需要注意倾斜角中横滚角的定义,横滚角是基于自身纵轴旋转的角度。
体坐标系和倾斜角的示意图如图6 所示。
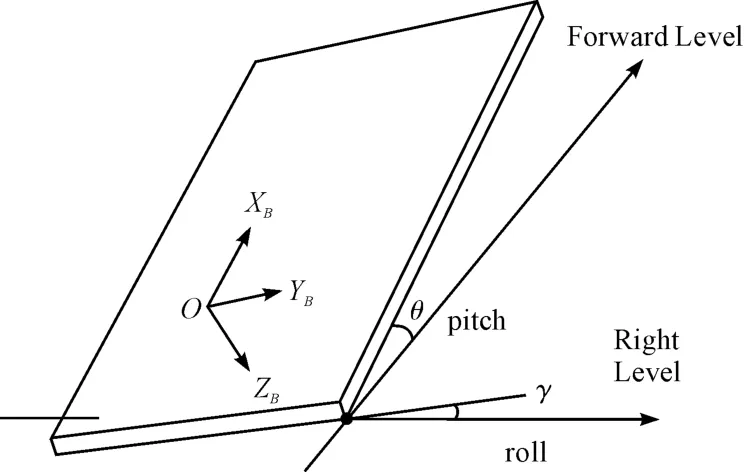
图6 载体坐标系和倾斜角示意
(4)天线坐标系T。和天线固连的坐标系,原点O和地理坐标系的原点O 重合,OXT轴正向指向天线的电轴,OYT轴垂直于OXT轴且其正向位于OXT轴右侧,OZT轴与OXT、OYT轴构成正交右手坐标系。
(5)理想波束坐标系W。原点O和地理坐标系的原点O 重合,OXW轴指向通行卫星,OYW轴则与卫星的极化方向一致,OZW轴与OXW、OYW轴构成正交右手坐标系。
对于AEP 型座架的PVSAT 站,可以将寻星的本质定义为:在体坐标系下,调整天线波束坐标系和理想波束坐标系重合。考虑到地磁场坐标系和地理坐标系仅存在旋转一个磁偏角的简单关系,是工程中测量航向角需要用到的过渡坐标系,因此,理论推导过程中,本研究采用了地理坐标系N、体坐标系B、天线坐标系T和理想波束坐标系W 4个坐标系来描述数字捷联平台的搭建过程。
初始状态令天线波束主轴平行AEP 型天线座架的前进方向,此时,天线坐标系T和体坐标系B 重合。需要注意的是,在AEP 型天线调整天线指向过程中,体坐标系B 到天线坐标系T 的旋转关系仅满足Z-Y-X 轴顺序的欧拉旋转顺序。
首先求解理想波束坐标系W。根据定义可知,理想波束坐标系可以通过对将地理坐标系下的波束按照Z-Y-X 顺序旋转得到。
公式(1)给出了计算地理坐标系下天线波束指向卫星的方位角、俯仰角和极化角计算公式,则天线波束在地理坐标系N 中对准卫星的姿态角为(AN,EN,PN)。令为地理坐标系旋转至波束对准理想波束坐标系的旋转矩阵,天线坐标系T 在体坐标系B 上的姿态角读数为(AC,EC,PC)。则当PVSAT 站的姿态角为(ψ,θ,γ)时,天线波束对准卫星的条件应该满足:

为了简化书写,令:
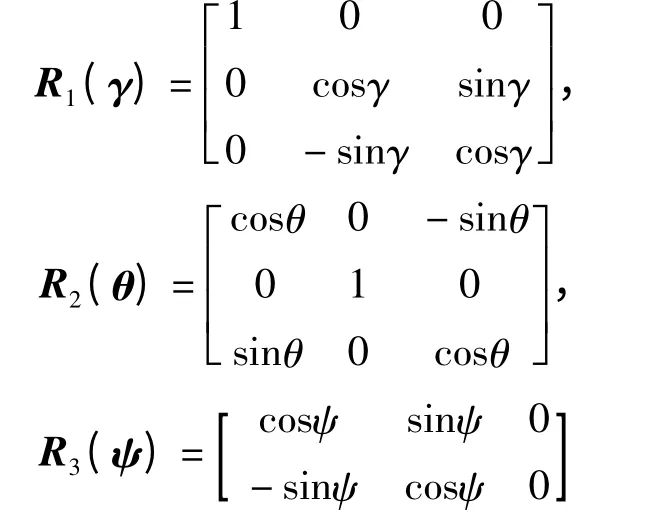
分别表示:绕x 轴、y 轴和z 轴的基元旋转矩阵,则:




将(AN,EN,PN)、通信站方位姿态角(ψ,θ,γ)代入式(4),结合式(6)可以解得(AC,EC,PC)。实际解算过程中,EC∈[0°,90°],因此,cosEC≥0,则可以通过T11和T12的值决定方位轴角所在的象限[9]。
2 数字捷联平台PVSAT 地球站寻星系统的开发
2.1 寻星系统设计
寻星系统主要由GNSS接收机和数字捷联平台组成,GNSS接收机选择了天宝公司的超薄型、小尺寸、低功耗哥白尼GPS接收机模块,其3σ 水平精度为8 m,高程精度位16 m。数字捷联平台由HMC5843L和SCA3000D01 芯片组成的三维电子罗盘构成,两个芯片分别通过SPI和I2C接口与主芯片通信,主芯片MCU 采用了AVR 公司的低功耗8 位单片机Megal128A。整个PCB 板卡封在一个铝制的壳子内,通过7 芯的航空插头与上位机互联。
哥白尼GPS 模块和三维电子罗盘的实物图如图7 所示。
图7 GPS 模块、三维电子罗盘实物图
本研究利用加速度计测量罗盘的倾角,进而通过倾角补偿算法消除倾角对测向精度的大部分影响[10]。倾斜状态下,获取准确倾斜角和磁航向角的解算公式如下:
式中:[xg3,yg3,zg3]—加速度计的测量值;θ—载体俯仰角,取值范围是(-90°,90°);γ—载体滚动角,取值范围是(-90°,90°)。
取式(7)的前两项分式,可以解算得到(θ,γ)。将(θ,γ)代入下式中,可以得到倾斜状态下磁偏航角ψM:

式中:[xm3,ym3,zm3]—磁场计的测量值。
运算时,还需要根据方位角所在的象限对ψM进行处理才能得到合理的磁方位角结果。研究者在对电子罗盘进行标定和校准后[11],还要结合PVSAT 站的磁偏角α,才能最终解算得地球站的航向角ψ。经过倾角补偿算法和校准后,航向角解算精度达到1°,倾角测量精度达到0.2°。MCU 通过RS232 串口采集哥白尼GPS接收机模块发送的地球站位置信息(λE,φE),结合三维电子罗盘上报的三维姿态信息(ψ,θ,γ),MCU 根据流程图4 解算出(AC,EC,PC),通过RS232 串口发送至手持式上位机,满足用户仅通过3次调整即可建立星站通信链路的需求。
2.2 寻星系统安装
GPS 天线的安装主要是考虑遮挡问题,可以安装在天线面板无遮挡的任意位置,也可以考虑安装在前馈天线的馈源附近,保证地球站进行卫星通信时,GPS天线的倾角不大于约20°即可。磁场传感器的测量数据容易受到周围磁介质的干扰,因此安装时,必须“嗅出”磁场相对干净的位置进行安装。安装时,以测量地磁场模的变化率为依据。本研究以可能带来干扰的介质为圆心,分步远离该介质,多次测量磁场模,当最近两次测量磁场模的比值介于(0.95,1.05)时[12],在该位置附近安装三维电子罗盘。安装罗盘前,应该尽量保证传感器的测量轴与体坐标系B 对应的轴满足如图3 所示的关系:x 正方向和载体的前进方向重合,y 正方向位于前进方向右侧且正交于前进方向,z 轴则和x-y 构成右手系。
考虑到PVSAT 的天线波束宽度,一般情况下,用户对AEP 座架的3个轴进行一次调整就可以达到快速寻星的目的。
3 实验结果与分析
2014年3 月,天津某地地球站卫星通信实验期间,本研究对配备调平机构的PVSAT 站和数字捷联平台PVSAT 站的寻星性能进行了实测比较。
该实验选择无遮挡地形放置两套PVSAT 站,初次对准某GEO 通信卫星,配置调平机构的PVSAT 站调平座架耗时约10 min,进而调整俯仰角、极化角和方位角,可以在不超过12 min 的时间内建立星地通信链路。对于数字捷联平台式的PVSAT 站,上电后可以直接调整天线座架的方位轴、俯仰轴、极化轴,可以在2 min 内建立星地通信链路。
考虑到座架调平时间受测站坡度的影响,经反复变更PVSAT 站地点,本研究统计发现调平座架的操作时间介于5 min~10 min 之间。而数字捷联平台式PVSAT 站省去了座架调平的时间,因此,不受测站坡度影响,反复变更测试站点后,平均寻星时间不超过2 min。
4 结束语
寻星速度是影响PVSAT 站快速响应性能的关键指标,整站重量是影响PVSAT 站便携性能的核心参数。本研究以AEP 型天线座架为例,研究了数字捷联平台PVSAT 地球站寻星原理,并以低成本的加速度计和磁场计搭建了低成本的三维电子罗盘。该部件的体积小,外壳60 mm×40 mm×30 mm,重量轻,不超过100 g,功耗低,约为18 mA/5 V,且制作费用少。数字捷联平台可以快速地解算出AEP 座架上3个轴角的调整度数,用户可以仅通过一组简单操作实现快速寻星,提高了寻星的速度,同时数字捷联平台替带了调平机构,有效降低了PVSAT 整站的重量,改善了地球站的便携性能。
[1]何华勇,杨燕玲,肖 祥.应对自然灾害的无线基站建设方案研究[J].灾害学,2014(3):96-97.
[2]谢丰奕.海地救灾重建采用移动卫星通信新技术[J].卫星电视与宽带多媒体,2010(6):16-17.
[3]苏 渊.便携式卫星通信地球站在应急救灾中的应用[J].电子科技,2011,24(11):135-137.
[4]徐 毅,刘晓滨.基于DSP 的静中通控制系统设计[J].中国新通信,2012(19):92-93.
[5]汪 芳,朱少华,雷宏杰.基于卡尔曼滤波器的数字式捷联航姿系统算法设计[J].中国惯性技术学报,2008,16(2):208-211.
[6]吴 鹏.船用卫星天线姿态稳定系统关键技术研究[D].哈尔滨:哈尔滨工程大学机电工程学院,2012.
[7]王解先,李浩军.磁偏角与磁倾角的公式推导与运算[J].大地测量与地球动力学,2009,29(3):88-90,94.
[8]PAUL D G.Principles of GNSS,Inertial and multisensor intergrated navigation systems[M].2nd Revised edition.London:Artech House Publishers,2013.
[9]王道平,何 敏,毕清波,等.移动卫星通信天线的极化匹配分析及稳定方案[J].广播与电视技术,2008(7):117-121.
[10]刘武发,蒋 蓁,龚振邦.基于磁阻和MEMS 加速度传感器的电子罗盘设计及应用[J].兵工学报,2008,29(2):244-248.
[11]秦 涛,马建仓,王 彤,等.电子罗盘最佳椭圆误差补偿方法[J].传感技术学报,2013,26(11):1499-1503.
[12]郑 义.基于磁阻传感器的姿态测量系统设计与实现[D].武汉:华中科技大学物理学院,2008.