一种基于机载广域监视系统的目标跟踪方法
2014-11-18琨赵凤军刘亚波郑世超
吴 琨赵凤军刘亚波郑世超②
①(中国科学院电子学研究所 北京 100190)②(中国科学院大学 北京 100049)
1 引言
通过雷达遥感对观测区域内的运动目标进行检测、定位和跟踪一直是微波遥感领域的研究热点之一。雷达系统在检测和定位运动目标方面具有独特优势,非常适合全天时的运动目标监视。这种雷达系统有一系列特殊要求,首先要求系统能够观测到足够大区域的运动目标;其次要求系统在一个区域的重访时间足够形成该目标的运动轨迹。机载广域监视(Wide Area Surveillance, WAS)系统就是基于这种实际需要设计的。机载广域动目标监视模式凭借其作用范围远,重访率高,可跟踪动态目标,观测时间不易受天气因素影响等优势,逐渐成为近些年运动目标监视方向理论研究和工程应用的重点。
广域监视系统在国外已有一定的研究和应用。在上世纪 90年代初期,由美国设计具有广域监视模式的联合星系统(Joint Surveillance and Target Attack Radar System, JSTARS)在海湾战争中发挥了重要的作用[1]。近些年德国也重视了对广域监视系统的研究,由 FHR设计的相控阵多功能成像雷达(Phased Array Multifunctional Imaging Radar,PARMIR)系统除了具有高分辨率 SAR 成像功能外,最重要的功能就是广域监视的模式[2,3]。在国内,中国电子科技集团公司第38研究所[4]、中国科学院电子学研究所[5]、国防科技大学和中国电子科学研究院也都有广域监视雷达的研究。
目标跟踪技术在军用和民用领域都有十分重要的应用价值,如在军事方面的空中预警、多目标攻击等,民用方面包括空中交通管制系统、智能交通管制系统等。雷达系统中动目标跟踪算法的研究也有相关文献发表。随着应用环境的不断复杂化,要求雷达具有多目标跟踪能力,且同时实现对多个目标的跟踪,多目标跟踪的基本概念由Wax[6]于1955年提出,1964年Sittler[7]在IEEE上发表的论文成为多目标跟踪的先导性工作。20世纪70年代初开始在有虚警存在的情况下,利用卡尔曼滤波方法对多目标跟踪进行系统处理。1971年 Robert等人[8]提出了最近邻法是解决数据关联的最简单方法。近年来随着跟踪技术的不断发展,为了避免目标被跟踪和被攻击必须使目标具有机动能力,所以出现了Singer算法,变维滤波算法[9],交互多模型算法[10]等应对跟踪目标的机动。
由于飞机微动和通道不均衡等原因,广域监视系统所获得的运动目标信息都有一定的误差,如何从这些并不完全准确的信息中得到相邻时刻目标的正确关联关系成为系统实现跟踪的主要问题。本文针对动目标斜距信息相对准确,速度以及方位角度误差较大的情况,首先通过在动目标预测位置设置合适波门,减少部分运算,之后对目标不同信息设置一定权值,计算相邻时刻目标的关联度,最后寻找相邻时刻关联矩阵的全局最优结果,即得出目标的关系,从而实现跟踪。
2 算法描述
2.1 系统模式及几何关系
机载广域动目标监视模式指飞机在飞行过程中,通过雷达天线扫描,较大程度地扩大实际观测的范围,如图1所示。载机以速度av向前飞行,同时天线波束在方位向由后向前扫描,扫描到某个角度驻留一定脉冲数,步进到下一个角度,扫描到规定角度后,反向扫描或者回到起始角度重新开始扫描,扫描角度范围可根据实际需求而定。这种天线波束在方位向上的扫描不仅扩大观测区域的目的,而且对关注的目标能够进行连续多次监视。
本文所描述的广域监视雷达是一个3通道的机载系统,相关性能参数见表 1。在信号处理过程中使用了基于高分辨率多普勒波束锐化图像的地面动目标检测、定位和测速方法[11]。
为了对动目标进行跟踪和定位,本文建立了以飞机初始位置为原点的载机坐标系,具体如图2所示。地理信息中的通用墨卡托坐标系(Universal Transverse Mercator, UTM)是正南正北的,UTMx指向正东,UTMy 指向正北,UTMz 为海拔。而载机本地坐标系与其飞行方向pv直接相关,这里假设飞机飞行方向与UTMx夹角为pα。
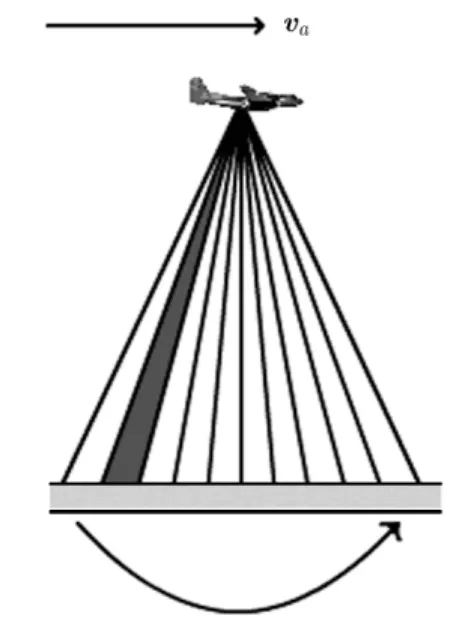
图1 广域扫描模式示意图
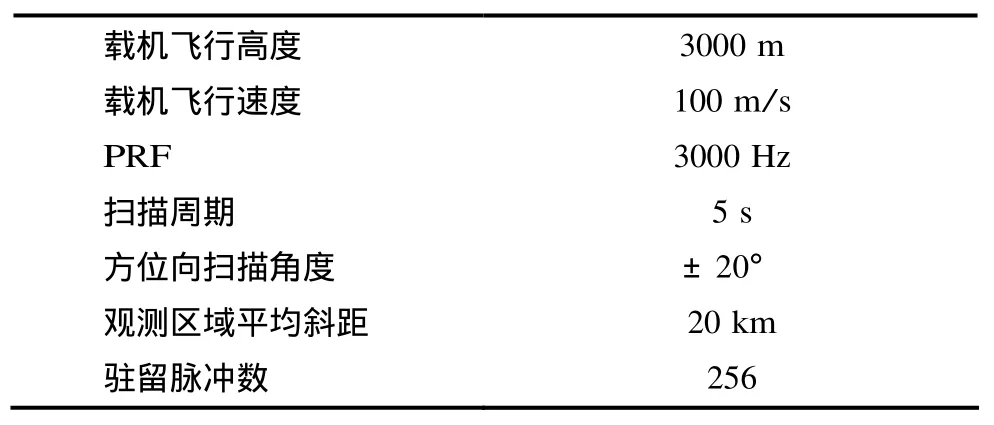
表1 系统基本参数
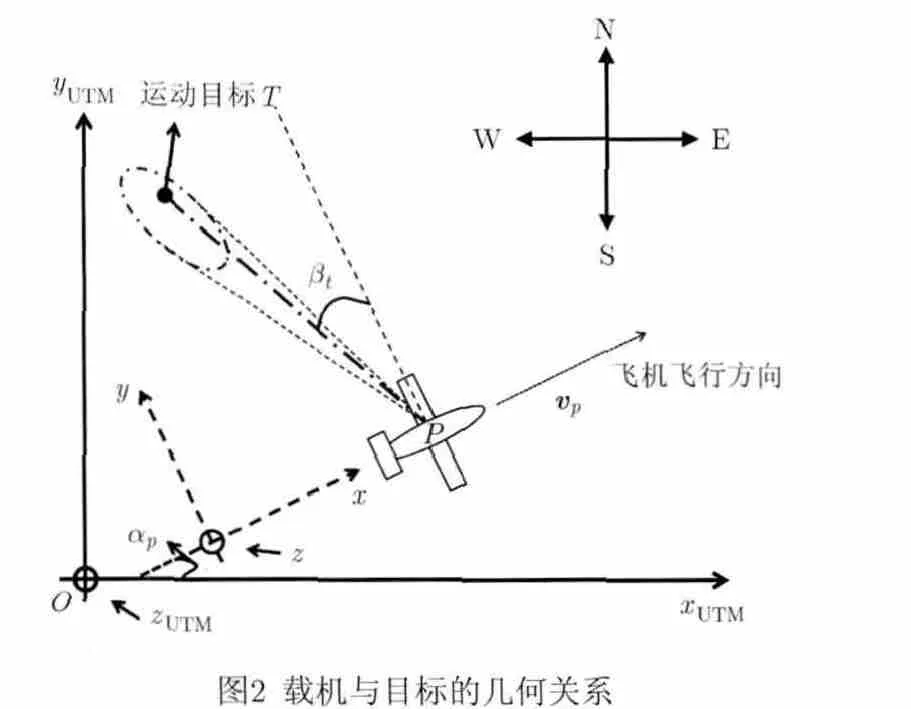
图2 载机与目标的几何关系

用P表示载机本地坐标系的原点。结合飞机自身的GPS定位,就能得到目标的经纬度。
2.2 跟踪算法流程
广域动目标检测为之后的数据处理提供的目标信息主要包括:斜距、方位角、多普勒单元、波位、信号强度和径向速度。跟踪算法的主要任务是确定相邻扫描时刻检测到目标的相互关系,其流程是通过当前时刻的目标信息,计算出下一时刻估计目标的信息,之后与下一时刻实际检测到的目标信息进行对比,计算其关联矩阵,并求出全局最优(Global Optimization, GO)的关联结果,完成相邻两个时刻的关联,积累一段时间后就能跟踪目标的轨迹,最终将关联处理后的动目标信息通过定位获得其经纬度值显示在电子地图上。算法主要处理流程如图3所示。
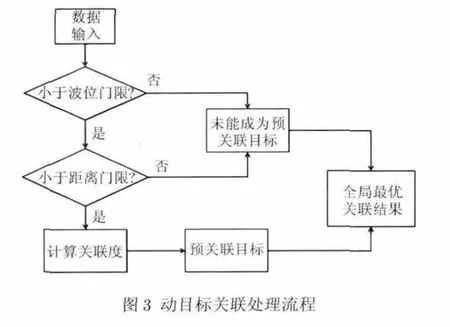
图3 动目标关联处理流程
2.2.1预处理 机载WAS系统因其自身特性,在与载机飞行方向平行的方向上观测的区域较大,可能存在的动目标点也会较多,实际情况中可能会有近千个目标,这对系统的实时性是一个极大考验。为了减少之后关联度的计算,预处理阶段对目标能否进入关联计算进行一定的门限设定。
机载广域监视模式中,天线的波束步进扫描。一个地面动目标在相邻两个时刻能够移动的波位数是一定的,这与天线方位向波束宽度、侧视角、载机高度、载机速度等有关。基于本文的系统设计,对下一时刻目标所在波位进行一定的筛选,就可以减少关联度计算的运算量。在 WAS模式下,动目标运动参数估计存在相位缠绕误差,使动目标斜距的估计精确度好于对方位角和径向速度的估计。基于此,本文根据地面目标可能存在机动,设定距离门限,再对下一时刻目标进行筛选。
2.2.2 计算关联度 在相邻两次扫描中,目标相对飞机的位置会是多种情况,可能同时出现在载机运动前方,后方,或正侧视方向。因而,在计算下一时刻目标状态的估计值时,本文没有使用文献[12]中的方法,而是直接根据余弦定理得出。
其中T是两次扫描的间隔时间,从而可以计算斜距部分的关联度:

其中re为斜距的测量误差,这样做是为了消除测量误差带来的影响。
为了确定相邻时刻两个目标是否为同一个目标,仅仅由斜距部分判断是不全面的,因而本文还综合了方位角、径向速度和信号强度3个方面进行判断。对于方位角,可采用式(5)得出其估计值:
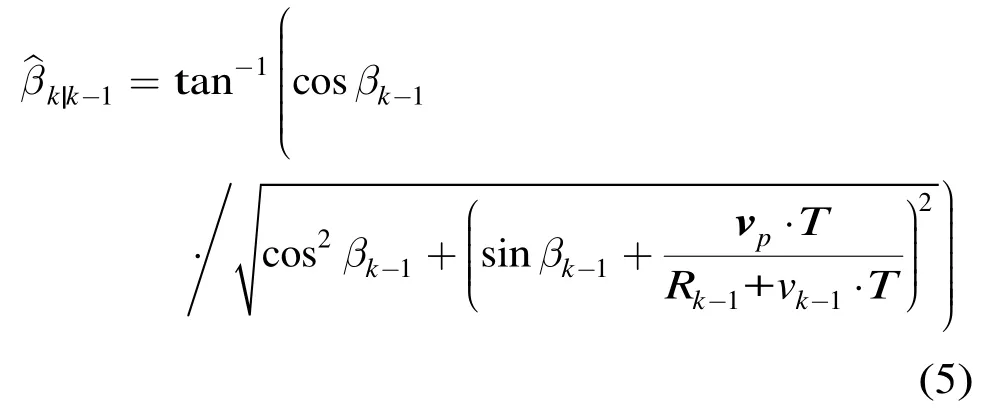
关联度中方位角部分就表示为

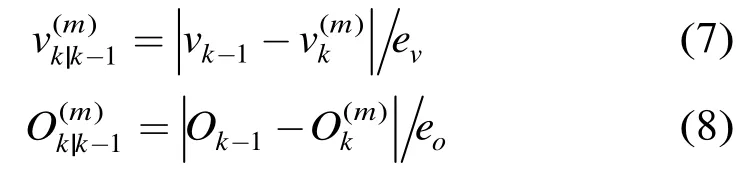
因为不能通过已有的目标信息得出径向速度和信号强度的估计值,所以两部分的关联度直接表示为分别是方位角、径向速度和信号强度的误差。如前所述,由于获取目标的不同信息精确度有差异,在计算整体关联度的时候本文进行了加权处理,即给斜距部分较高的权值,其它部分的权重则相对较低。则当前时刻第n个目标与下一时刻第m个目标的关联度表示为

2.2.3确定关联结果 假设当前时刻有n个动目标,下一时刻有m个动目标,根据式(9)就能合成相邻时刻的关联度矩阵:
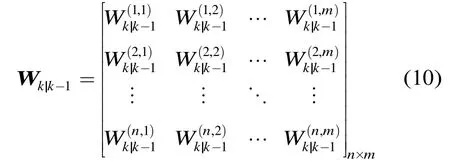
矩阵中第i行代表了当前时刻检测到的第i个目标与下一时刻所有目标的关联度,而第j列表示了下一时刻第j个目标与当前时刻所有目标的关联度。在不考虑目标分叉与合并等情况下,一般认为当前时刻的某一个目标在下一时刻有且仅有一个目标与之关联。根据这个假设,本文构造了一个nm×的系数矩阵Z来表示关联结果,矩阵中的元素满足式(11)条件:
由式(9)的定义,在确定两个目标是否关联时,选择关联度数值较小的组合。在实际中,经常会出现某一区域目标比较密集,为了使关联结果满足唯一解的假设,在求解系数矩阵Z时,从关联度矩阵的全局出发,要求矩阵元素满足:

利用匈牙利算法解算出全局最优的最小关联度结果,也就是得出相邻时刻目标的关联信息。这样利用关联结果更新每次扫描后的目标轨迹,同时在带有电子地图的显示软件上实时将运动目标轨迹标注在地图当中。
3 实验结果
3.1 仿真结果
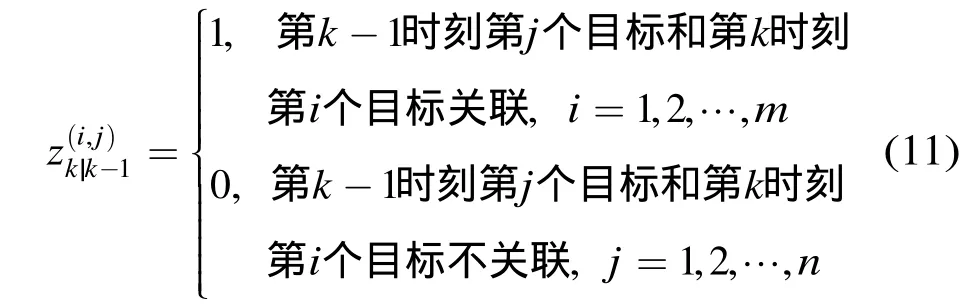
本节对算法的性能进行仿真实验和分析,我们在仿真实验中设计了3个运动目标,其中2个目标做转弯运动,1个目标做斜线运动,斜线运动的目标只在一段时间里处于运动状态。设定的运动参数具体见表 1。为了使仿真接近实际中可能出现的各种误差,在仿真的过程中添加了随机噪声,分别在距离向和方位向添加方差为8 m和20 m的误差。具体的跟踪结果如图4所示。设计仿真的3条轨迹需满足以下条件:
(1)目标的运动不能是简单的匀速/匀加速模型;
(2)运动轨迹之间要有交叉,这样即使没有出现因噪声的位置混叠,也能检验算法的关联正确度;
(3)目标不是同时出现,也不是同时消失,这也就是目标不对等的情况,检验算法能否对轨迹进行正确的管理,其中包括新轨迹建立,轨迹维持以及轨迹的停止跟踪(目标停止或消失)。
通过仿真数据的关联结果可以看到,在向原始轨迹中不同方向的信息添加了不同的噪声之后,本文算法能够很好地关联轨迹,从而证明了算法的有效性。图4(b)中,对关联轨迹进行了卡尔曼滤波处理[13,14]。

表2 仿真主要参数
3.2 算法仿真分析
如前所述,由系统信号处理部分得到的目标信息会有误差,本文算法能否在实际系统中得到良好应用的一个重要因素是算法对数据误差的容忍度。分析可得在动目标相对稀少的区域算法对数据误差的容忍度高,目标稠密的区域则相反;相邻两次观测的时间间隔越短,算法对数据误差的容忍度越高。
本节设计的仿真实验有4个由左向右运动的目标,其中两个目标在运动过程中有交叉,这些交叉的位置也就是最可能发生误关联的位置如图5。
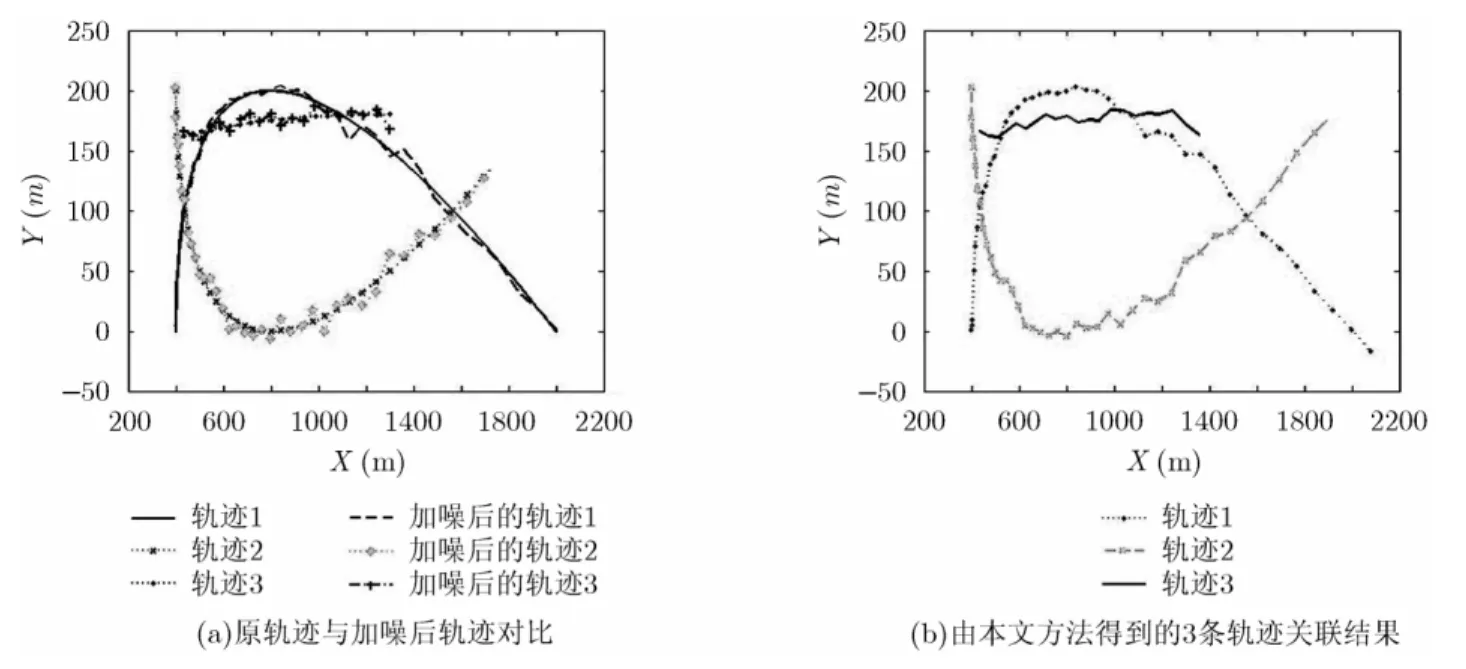
图4 算法关联结果图
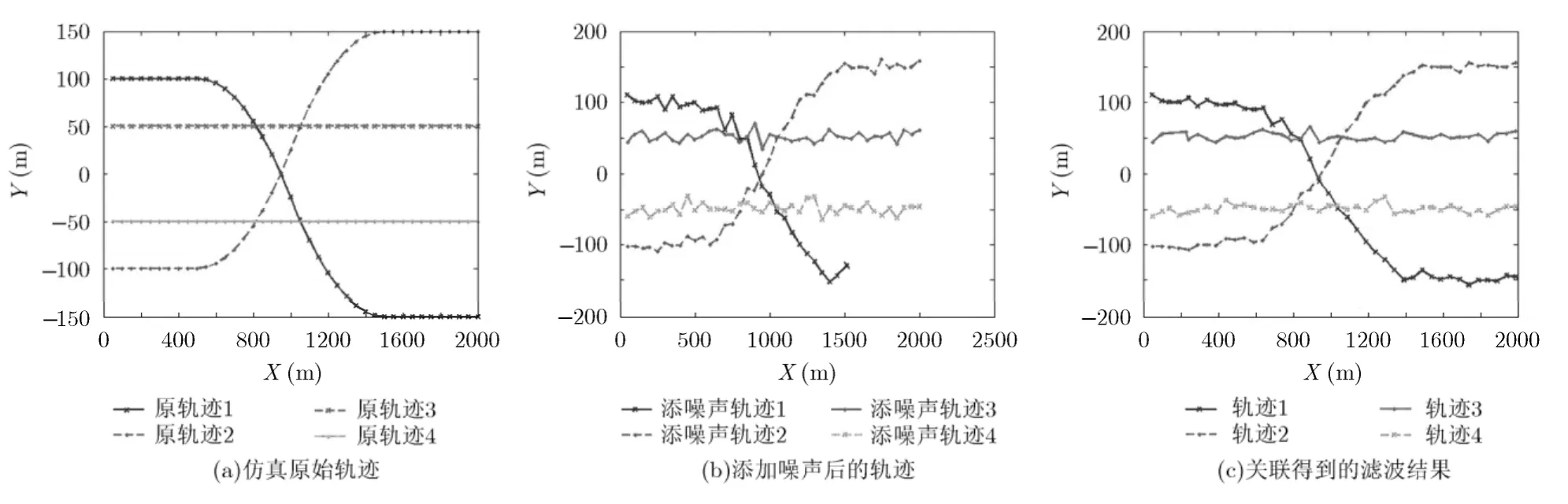
图5 仿真结果
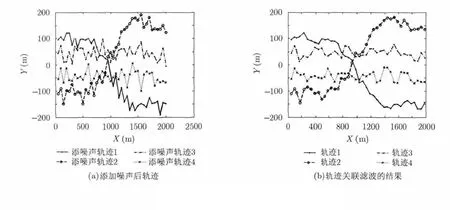
图6 添加400个单位噪声结果
在 ,X Y方向分别都添加方差为100 m和400 m的噪声后,算法的关联结果如图6所示。由以上两个加噪后的跟踪结果可以看出,相距 50 m的目标在加方差为100 m的误差后,位置误差较小,还没有出现仅因为噪声的误差使两目标轨迹有交叉的现象;当添加方差为400 m的噪声后,会有明显的轨迹交叉现象。通过两次结果比较,本文算法不仅在目标稠密的区域实现了较好关联,而且在噪声较强的情况下,也能完成正确的关联。仿真中,对两个并排朝x正向运动的目标添加较高能量的噪声(,x y方向的噪声方差分别为900 m和3300 m),算法出现了关联错误(图 7(c)中的画圈部分),如图 7所示。
根据以上仿真,从定量分析的角度,目标状态误差值的大小范围在相邻时刻目标实际移动距离附近时,设计的系统能够正常跟踪和关联,但当误差范围超过这个近似的阈值之后,在目标交叉位置(可以认为是当前时刻区域目标密集)关联会出现错误,不能进行正确的跟踪。在当前系统斜距信息相对于目标速度和径向角度信息更为准确的情况下,可以认为:如果2个目标i, j在某一时刻t的实际距离为,当定位误差大于等于,那么就很可能出现关联的错误。
另外,我们还与最邻域法(Nearest Neighbor Filter, NNF)[8]和可信度函数法(Belief Function Method, BFM)[15,16]进行了比较。仿真目标的运动轨迹是对同一轨迹添加相同参数的随机噪声所产生的100次结果。3种方法的比较如图8所示。
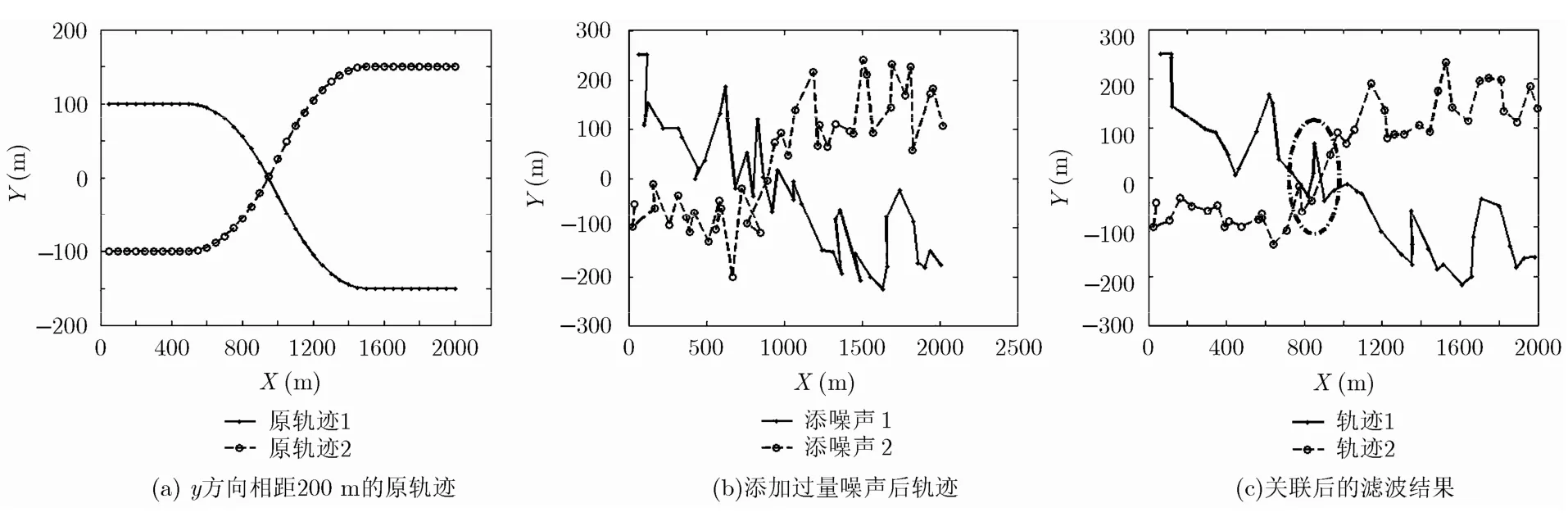
图7 添加过量噪声的结果
从关联率的对比可以看出,本文方法整体上比另外两种方法正确关联率更高,从而使误差的均方值更小。在某些随机噪声的情况下,可信度函数法的正确关联率更高,但是反应其整体误差水平的均方值没有全局最优法可靠。
3.3 系统实际结果
采用本文方法对实际飞行数据进行了处理。对3通道获得的目标检测信息的处理,我们完成了相邻两次扫描中运动目标的关联和跟踪。如图9所示为内蒙古呼和浩特市附近的榆柴线,算法对两个沿路的地面运动目标实现了正确跟踪,如图9中两个目标的连线即为其运动轨迹。
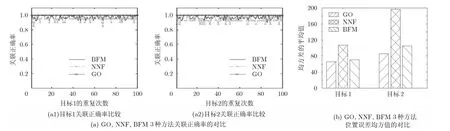
图8 3种方法正确率和位置误差均方值的比较

图9 实际处理中的结果
4 结束语
本文设计了广域监视系统里动目标的关联跟踪方法。利用系统检测到的动目标信息完成了相邻时刻目标关系的确认,得到了较好的结果。由于整个系统都还在实验研究认证阶段,能够实现的轨迹关联和跟踪都有限,我们将进一步完善本系统及其算法和实际应用。
[1] Entzminger N J, Fowler C A, and Kenneally W J.JointSTARS and GMTI: past, present and future[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999,35(2): 748-761.
[2] Cerutti-Maori D, JKlare J, Brenner A R, et al.. Wide-area traffic monitoring with the SAR/GMTI system PAMIR[J].IEEE Transactions on Geoscience and Remote Sensing, 2008,46(10): 3019-3030.
[3] Cerutti-Maori D, Gierull C H, and Ender J H G.Experimental verification of SAR-GMTI improvement through antenna switching[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(4): 2066-2075.
[4] 王志红. 单通道无人机载 GMTI系统的点迹处理研究[J]. 雷达科学与技术, 2009, 7(6): 452-455.Wang Zhi-hong. Research on plot processing in UAV-borne single-channel GMTI system[J]. Radar Science and Technology, 2009, 7(6): 452-455.
[5] 许睿鹏, 胡东辉, 丁赤飚, 等. 改进混合积累的单通道机载SAR高径向速度目标检测方法[J]. 电子与信息学报, 2012,34(7): 1623-1629.Xu Rui-peng, Hu Dong-hui, Ding Chi-biao, et al.. Improved hybrid integration detection algorithm of moving targets with fast radial velocity based on single-channel SAR system[J].Journal of Electronics & Information Technology, 2012, 34(7):1623-1629.
[6] Wax N. Signal-to-Noise improvement and the statistics of tracking populations[J]. Journal of Applied Physics, 1955,9(1): 586-595.
[7] Sittler R W. An optimal data association problem in surveillance theory[J]. IEEE Transactions on Military Electronics, 1964, 8(2): 125-139.
[8] Robert A S and John J S. An optimal tracking filter for processing sensor data of imprecisely determined origin in surveillance systems[C]. 1971 IEEE Conference Decision and Control, Miami Beach USA, 1971: 171-175.
[9] Ronald G S. An efficient suboptimal decision procedure for associating sensor data with stored tracks in real-time surveillance systems[C]. 1971 IEEE Conference Decision and Control, Miami Beach USA, 1971: 33-37.
[10] Kirubarajan T, Bar-Shalom Y, Blair W D, et al.. IMMPDAF for radar management and tracking benchmark with ECM[J].IEEE Transactions on Aerospace and Electronic Systems,1998, 34(4): 1115-1134.
[11] 郑明洁, 闫贺, 张冰尘, 等. 基于DBS图像的双通道广域监视雷达动目标检测和参数估计方法[J]. 雷达学报, 2012, 1(1):36-42.Zheng Ming-jie, Yan He, Zhang Bing-chen, et al.. A novel method of moving target detection and parameters estimation for dual-channel WAS radar based on DBS image[J]. Journal of Radars, 2012, 1(1): 36-42.
[12] 危嵩. 机载合成孔径雷达动目标检测与成像研究[D]. [博士论文], 华中科技大学, 2005.Wei Song. Research on detecting and imaging of moving target with airborne synthetic aperture radar[D]. [Ph.D.dissertation], Huazhong University of Science & Technology,2005.
[13] Karlgaard C D and Shen Hai-jun. Desensitised Kalman filtering[J]. IET Radar, Sonar & Navigation, 2013, 7(1): 2-9.
[14] Ristic B and Sherrah J. Bernoulli filter for joint detection and tracking of an extended object in clutter[J]. IET Radar,Sonar & Navigation, 2013, 7(1): 26-35.
[15] Ahmed D, Abdelaziz O, and Mourad O. Data association in multi-target tracking using belief function[J]. Journal of Intell Robot System, 2012, 67(3/4): 219-227.
[16] Dallil A, Oussalah M, and Ouldali A. Sensor fusion and target tracking using evidential data association[J]. IEEE Sensors Journal, 2013, 13(1): 285-293.
