基于椭圆对数极坐标变换的尺度变化目标跟踪算法
2014-11-08侯志强魏国剑余旺盛
李 武,侯志强,魏国剑,余旺盛
(空军工程大学 信息与导航学院,陕西 西安710077)
引言
目标跟踪一直是计算机视觉领域的研究热点,在战场监控、无人机的自主导航等军事领域以及智能交通监控、视频监控、压缩编码、三维重构、气象分析、辅助医疗等民用领域广泛应用。如何适应目标的表观变化,实时调整目标运动所引起的尺度变化,是目标跟踪所面临的挑战之一。Comaniciu等人[1]提出了增量试探法,通过计算上一帧尺度及其增量±10%3个尺度下的Mean Shift跟踪,选取相似性系数最大的跟踪窗所对应的带宽为最佳带宽,这种方法存在小尺度游荡和尺度跟踪滞后的问题[2]。Bradski[3]提出了基于不变矩的方法:利用Mean Shift迭代收敛至候选目标位置,计算跟踪窗口内像素的二阶中心矩确定目标的尺度因子。由于矩特征计算复杂,严重影响了算法的实时性。文献[4]引入一个额外的尺度核,通过对采样加权图像进行DOG滤波,在尺度空间进行Mean Shift迭代找到最佳核窗宽。该方法计算量大且使用Epanechnikov核等价于在尺度空间求各尺度的平均。彭宁嵩等人[5]利用匹配角点求解仿射模型参数来确定目标的尺度,该方法仅适用于刚体或者形变较小的目标。林庆等人提出多尺度图像信息量度量方法[6],根据信息量的变化选择跟踪窗的尺度。由于难以找到彻底区分目标和背景的信息描述,因此,该算法很难适应场景变化。文献[7]利用对数极坐标变换域的相关匹配确定目标尺度。该方法局限于跟踪圆形目标。在分析对数极坐标变换的基础上,本文提出了一种基于椭圆对数极坐标变换的尺度变化目标跟踪算法。与传统方法相比较,本文算法不受目标外观形状的限制,充分利用了目标中心和外围的信息,具有较好的鲁棒性。
1 算法描述
目标跟踪过程实际上就是描述目标和定位目标的过程,对于尺度变化的目标跟踪,定位过程又分为空间定位和尺度定位。本文利用Mean Shift算法对目标进行空间定位,进而在椭圆对数极坐标变换域映射目标和候选目标,通过相关匹配自适应目标的尺度变化。
1.1 目标空间定位
Mean Shift是一种实用的跟踪算法,具有计算量小,对边缘遮挡、目标旋转、变形和背景运动等复杂情况不敏感等优点。Mean Shift目标模型描述有核函数加权直方图和背景加权直方图[8-9]。背景加权表示能够抑制目标跟踪窗内的背景因素,突出目标特征。本文目标模板qu采用背景加权,目标候选pu采用核函数加权,其相应公式如下:
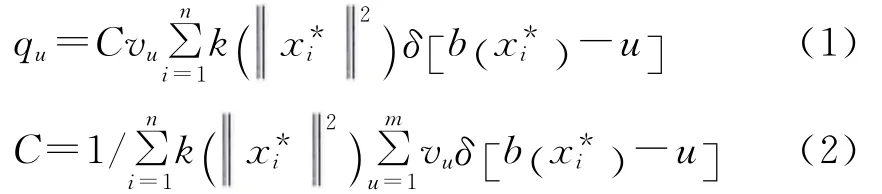
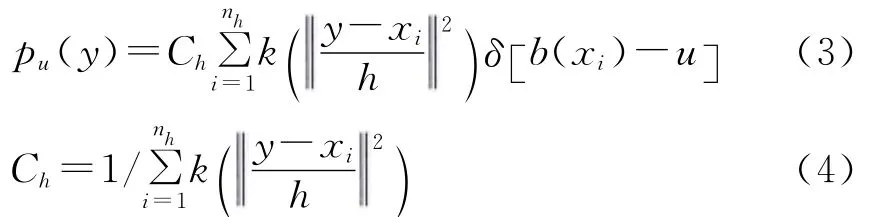
式中:Ch为归一化系数,xi为候选目标像素当前帧的位置;h表示核窗宽,通常取目标跟踪窗宽一半。
核窗宽固定的Mean Shift跟踪算法难以有效跟踪尺度增大的跟踪目标,实际上,只要目标的伸缩平移变化处于跟踪框范围内,Mean Shift空间定位的准确性就不受影响[5],因此,为了减小空间定位误差,本文采用1.2倍的上一帧跟踪窗进行目标空间定位。
1.2 椭圆对数极坐标变换(ELPT)
对于非圆形目标,基于对数极坐标变换的方法往往直接作圆形处理,或者直接选择目标中心最大内切圆形区域为跟踪区域,或者选择目标的最大外接圆形区域为跟踪区域,如图1所示。这种粗糙的处理方式要么减少了描述目标特征像素的多样性,降低了目标的抗噪能力,要么引入了较多的背景信息,降低了目标与背景的区分度,同时,受目标形变和颜色一致性的影响,持续跟踪的稳定性会大大降低。
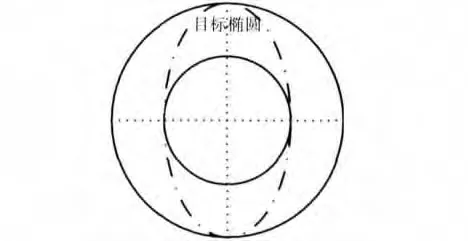
图1 基于对数极坐标变换的方法Fig.1 Algorithm based on LPT
图像椭圆对数极坐标变换的思想是通过椭圆极坐标变换将图像从笛卡尔坐标系(Cartesian coordinates)转换至极坐标系,然后再取对数变换到椭圆对数极坐标系,变换过程如图2所示。对数极坐标变换:

式中:a、b分别表示初始帧人工框定的目标宽和高;(x0,y0)表示目标的中心坐标,也就是所谓的变换中心;α为

图2 椭圆对数极坐标变换原理图Fig.2 Schematic of ELPT
细化参数k1、k2解决了算法中“值域太窄”和“存在小数”的问题[10],即直接变换后的点(r,θ)较小且存在多个(x,y)对应同一个(r,θ)的问题,对图像进行放大并作取整或者插值运算,提高了图像取样的精确度和分辨率。通过对数极坐标变换,将笛卡尔坐标系下的尺度旋转问题转化为对数极坐标系下的平移问题,k1,k2计算式:

式中:p、Q表示对数极坐标变换后图像的大小;[·]为取整运算。
传统基于LPT的跟踪方法局限于跟踪圆形目标,对于非圆形目标,往往需要作近圆处理,或者直接选择目标跟踪框中心最大内切圆形区域为跟踪区域。由于这样的粗糙处理减少了描述目标特征的像素,必然会造成目标在跟踪过程中抗噪能力下降,且受目标颜色一致性的影响,跟踪性能会有所降低。基于椭圆对数极坐标变换拓宽了对目标形状的限制,充分利用了目标的像素信息。
1.3 目标尺度确定
通过空间定位确定图像序列第k帧的目标形心Ok后,对目标搜索窗口Tk内的图像以Ok为中心进行椭圆对数极坐标变换,形成Ik(r,θ)。椭圆对数极坐标变换对目标不同区域进行不同的分辨率描述,对中心区域进行高分辨率描述,周边区域进行粗糙表达,突出了跟踪目标的中心区域,抑制边缘像素的背景干扰,对短半轴区域进行高分辨率描述,长半轴进行粗糙表达,体现了“多退少补”的思想,突出了目标的整体均衡性。通过变换,将笛卡尔坐标系下的尺度问题转化为对数极坐标系下的平移问题。在椭圆对数极坐标变换域中,目标的尺度变化总是沿着r轴进行的,所以对r轴进行积分求和将产生旋转不变的一维映射函数Sk(r):

采用归一化的相关函数作为映射函数Sk(r)和Sk-1(r)的相似性测度:
式中:Sk表示模板图像的r轴映射;μk表示Sk的均值。
根据相关系数的最大值位置可以求得目标沿r轴的平移量dr,从而恢复出当前帧目标的尺度。

式中:Wk-1、Wk分别表示第k-1帧和第k帧中目标的尺度;k1为(5)式中的放大系数。
1.4 模板更新
目标运动常常伴随姿态、尺度、光照等变化,固定的模板往往会因为无法适应目标表观变化而造成跟踪丢失或漂移,适时修正目标的跟踪模板是视频长时间准确稳定跟踪的有力保障。
对于椭圆对数极坐标变换域的一维相关采用逐帧更新的方式,也就是说,相关匹配总是在当前帧与上一帧的图像之间进行。
对于Mean Shift跟踪,采用隔帧检测(每隔4帧)和条件加权[11]的方法来更新模板。
2 算法流程
对于尺度变化的目标跟踪,空间定位和尺度定位相互依赖。空间定位是尺度定位的基础,空间定位不准确,尺度定位就很难正确;反过来,尺度定位又是空间定位的条件,只有在正确的尺度范围内提取目标特征,才能实现有效特征匹配。算法流程如图3所示,具体如下:
步骤1:在视频初始帧人工标定跟踪目标,计算目标模型qu以及目标椭圆对数极坐标变换模型S0(r);
步骤2:取前一帧目标的中心作为初始中心,目标窗口的1.2倍为跟踪尺度进行Mean Shift空间定位;
步骤3:对目标候选区域进行椭圆对数极坐标变换,并在一维映射中求取归一化的相关系数,根据式(12)即可求出目标的当前尺度;
步骤4:以步骤2的跟踪结果为初始位置,步骤3的尺度为新的跟踪尺度,进行Mean Shift精确跟踪;
步骤5:判断模板更新条件,更新目标模板及椭圆对数极坐标变换模型;
步骤6:返回步骤2进行下一帧跟踪。
3 算法验证及分析
实验硬件平台为主频2.6GHz CPU,内存2GB的计算机,软件平台为Windows XP操作系统,编译环境为Matlab R2007a。实验中采用RGB颜色空间和16bin×16bin×16bin的直方图,初始化在第一帧手工完成。Mean Shift采用Epanechnikov核。
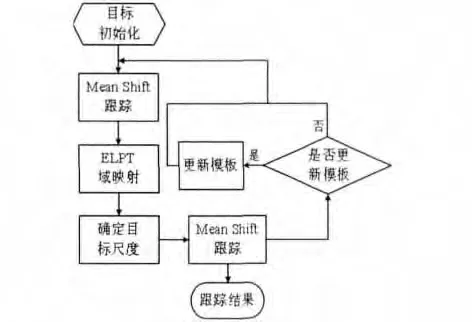
图3 跟踪算法流程图Fig.3 Flow chart of tracking algorithm
3.1 尺度缩小目标跟踪
主要测试算法对逐渐变小和近圆形目标的跟踪能力。图4为从Vehicle序列中截取的一段视频跟踪结果,帧长71帧。基于巴氏系数的相似性度量经常会在较小好的结果。但是,实验中算法在第50帧左右还是产生了一定的漂移,主要是因为该方法缺乏必要的模板更新机制,当目标远去之后,描述目标像素减少,受光照等影响,目标的表观模型变化较剧烈,原有目标模板已不适合继续匹配下去。文献[6]方法受限于复杂场景的制约,无法区分统计的信息属于目标信息还是背景信息。文献[7]方法局限于处理圆形区域,因此对于近圆形目标,也能够获得比较好的跟踪结果。本文算法适时更新目标模板,改善了算法适应目标表观变化的能力,增强了算法的稳定性。
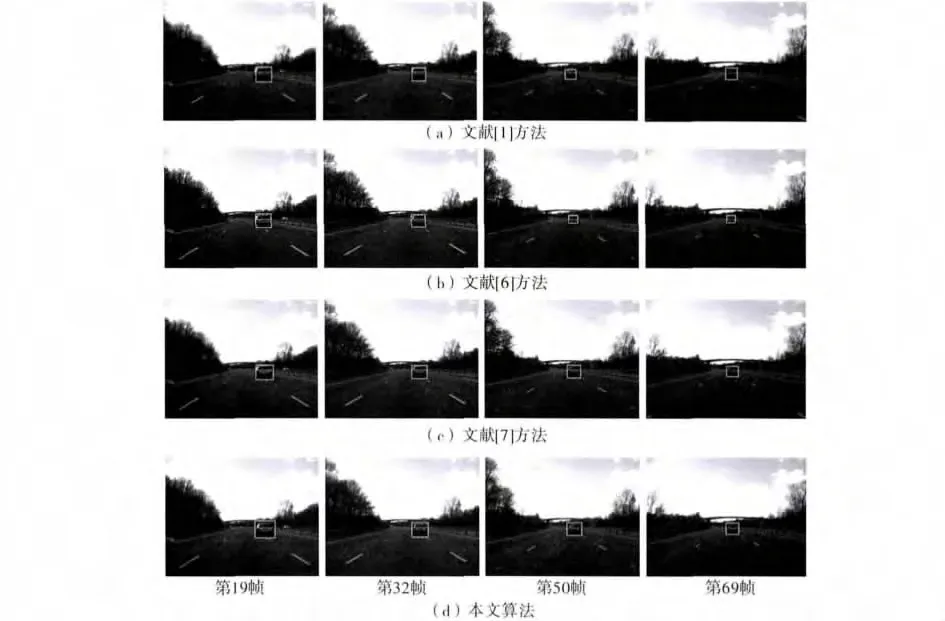
图4 尺度缩小目标跟踪结果Fig.4 Tracking result of down-scale target
3.2 尺度增大目标跟踪
主要测试算法对于逐渐变大和非圆形目标的跟踪能力。图5为从OneStopEnter序列中截取的一段视频跟踪结果,帧长230帧。从图中可以明显看到,对于逐渐增大的运动目标,文献[1]方法发生漂移并最终陷入局部极值。文献[6]方法对光照变化比较敏感,当光照变亮后,虽然目标变大,但是统计的目标信息量反而变小,致使算法陷入了局部“陷阱”。文献[7]方法对于非圆形目标粗糙的圆形处理方式降低了算法抗干扰的能力,加之目标运动过程中形变扰动影响,算法持续跟踪误差较大。本文算法在跟踪过程中能较好地自适应目标尺度变化,具有较好的跟踪效果。

图5 尺度增大目标跟踪结果Fig.5 Tracking result of up-scale target
图6 显示了四种算法的跟踪误差,即跟踪结果的形心到目标实际形心的欧氏距离。其中,目标的实际形心坐标通过人工逐帧标注得到。
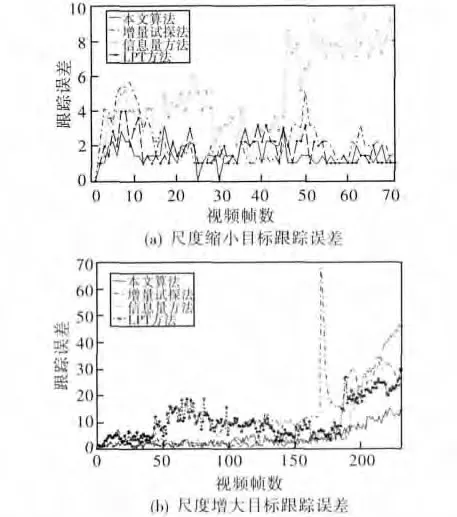
图6 两组实验中四种算法的跟踪误差比较Fig.6 Tracking error analysis of 4 algorithms in tests
为了定量分析本文算法的性能,求取跟踪目标在X、Y方向上的平均跟踪误差和正确跟踪率,见表1。可以看出,本文算法的平均跟踪误差明显低于其他两种算法。其中,正确跟踪率定义为正确跟踪的视频帧数与视频总帧数之比。

表1 算法性能比较Table 1 Comparison of algorithm performance
4 结论
针对传统跟踪算法不能很好解决尺度缩放目标跟踪的问题,本文在准确定位目标空间位置的基础上,改进了传统基于对数极坐标变换跟踪算法局限于跟踪圆形目标的弊端。实验结果表明,算法能够较好地跟踪尺度变化目标,具有一定的实用价值。事实上,对于目标的宽高比变化、运动模糊等问题本文算法还欠考虑,这也是有待进一步研究的问题。
[1] COMANICIU D,RAMESH V,MEER P.Kernel-Based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-575.
[2] 左军毅,梁彦,赵春晖,等.Mean Shift跟踪算法中尺度自适应策略的研究[J].中国图象图形学报,2008,13(9):1751-1758.ZUO Jun-yi,LIANG Yan,ZHAO Chun-hui,et al.Researches on acale adaptation strategy in Mean Shift tracking algorithm[J].Journal of Image and Graphics,2008,13(9),1751-1758.(in Chinese with an English abstract)
[3] BRADSKI G R .Real time face and object tracking as a component of a perceptual user interface[C].Stoughton:Printing House,1998.
[4] COLLINS R T.Mean Shift blob tracking through scale space:Proceedings of IEEE Conference on computer vision and pattern recognition,Madison,Wisconsin,June 18-20.2003[C].USA:IEEE,2003.
[5] 彭宁嵩,杨杰,刘志,等.Mean-Shift跟踪算法中核函数窗宽的自动选取[J].软件学报,2005,16(9):1542-1550.PENG Ning-song,YANG Jie,LIU Zhi,et al.Automatic selection of Kernel-bandwidth for mean-shift object tracking[J].Journal of Software,2005,16(9):1542-1550.(in Chinese with an English abstract)
[6] 林庆,陈远祥,王士同,等.目标窗口尺寸自适应变化的Mean-Shift跟踪算法[J].计算机应用,2009,29(12):3329-3331.LIN Qing,CHEN Yuan-xiang,WANG Shi-tong,et al.Mean Shift tracking algorithm with adaptive bandwidth of target[J].Journal of Computer Applications,2009,29(12),3329-3331.(in Chinese with an English abstract)
[7] 孙小炜,李言俊,陈义.基于人眼视觉非均匀特性的实时 Mean Shift跟踪方法[J].光子学报,2009,38(3):719-724.SUN Xiao-wei.,LI Yan-jun.,CHEN Yi.Real time mean shift tracking method based on human vision non-uniform sampling[J].Acta Photonica Sinica,2009,38(3):719-724.(in Chinese with an English abstract)
[8] 赵高鹏,薄煜明.基于自适应选择的金字塔均值漂移跟踪方法[J].光子学报,2011,40(1):154-160.ZHAO Gao-peng.,BO Yi-ming.Pyramid mean shift tracking algorithm based on adaptive feature selection[J].Acta Photonica Sinica,2011,40(1):154-160.(in Chinese with an English abstract)
[9] 胡波.基于改进Mean Shift算法的实时视频目标跟踪[J].光子学报,2012,41(4):461–464.HU Bo,Real-time video target tracking based on improved mean shift arithmetic[J].Acta Photonica Sinica,2012,41(4):461-464.(in Chinese with an English abstract)
[10] 李刘林,沈海斌,潘辉.细化参数的对数极坐标变换图像纹理特征提取算法[J].浙江大学学报:理学版,2009,36(2):162-164.LI Liu-lin,SHEN Hai-bin,PAN Hui.Robust feature extraction arithmetic based on parametrical logpolar transformation for texture image[J].Journal of Zhejiang University:Science Edition ,2009,36(2):162-164.(in Chinese with an English abstract)
[11] 王晓华,滕炯华,赵春晖.基于H分量检测的模板更新鲁棒分块跟踪方法[J].计算机应用,2012,32(5):1261-1264.WANG Xiao-hua,TENG Jiong-hua,ZHAO Chunhui,Robust fragments-based tracking with hue detecting-based template updating[J].Journal of Computer Applications.2012,32(5):1261-1264.(in Chinese with an English abstract)