浮筏隔振及声辐射同步定相控制研究
2014-10-25周刘彬杨铁军MichaelBRENNAN刘志刚
周刘彬,杨铁军,Michael J.BRENNAN,刘志刚
(1.哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001;2.圣保罗州立大学机械工程学院,巴西伊利亚索尔泰拉01049-010)
传统的振动被动控制由于不需要外界能源,装置结构较简单,易于实现,经济性与可靠性好,在许多场合下减振效果已能满足要求,在船舶领域得到广泛地应用,如隔振(单层、双层和浮筏隔振)、吸振(安装动力吸振器),阻振(在振动恶劣部位铺设阻尼材料)等[1-5]。随着科学技术的发展,人们对振动环境、产品与结构振动特性的要求越来越高,振动主动控制技术日益受到重视[6-8]。目前的研究已经从单台设备振动的主动控制[9-14]发展到多台设备共用浮筏的振动主动控制[15-23],从基于刚性基础的主动隔振到开始研究弹性基础上的浮筏主动隔振技术的理论和实验验证,而且还开始了针对水声的主动隔振技术实船实验研究[24-25]。相比而言,振动主动控制系统由于需要外界能量的输入而结构较为复杂,成本高于被动控制系统;同时由于舰船实际工作环境较为恶劣,实施主动控制需要更可靠的执行器、控制器及有效的控制策略和算法。这在一定程度上制约了主动控制技术在舰船领域的进一步应用。
同步定相控制技术在控制螺旋桨飞机的振动和舱室噪声方面已经被证实是一种行之有效的方法,并形成了 PST(propeller signature theory)理论[26-30],但在船舶领域还鲜有应用研究。与振动主动控制技术相比,同步定相控制无需额外的执行机构(次级振源)和相应的控制系统,而仅需对各个设备运转时的相位进行调节,这对于舰船浮筏上的多个设备振动控制而言不失为一个简单而有效的选择。
针对浮筏隔振系统开展了同步定相控制技术的研究,通过调节浮筏上的各个旋转或往复机械设备的相对相位,使它们互相抑制各自产生的振动,减小经过浮筏到弹性舱段结构的振动传递,进而减小船体的结构声辐射。
论文详细描述了浮筏隔振系统同步定相控制中目标函数的选择、同步定相控制技术的原理和最优相位的求解过程,最后给出在实验室环境下基于弹性舱段结构的浮筏隔振系统进行隔振和声辐射控制的实验结果。为了便于研究而不失一般性,采用三相异步电动机带动反向旋转的偏心质量对来模拟浮筏上的机械设备,可以很方便地通过调整电机来实现同步定相控制。同时在弹性舱段周围布置了多个声传感器作为声辐射控制的评价。
1 同步定相理论
1.1 目标函数的选择
图1所示为典型的浮筏隔振系统,多台机械设备的振动通过浮筏传递到船体结构,将引起船体结构的结构声辐射。由于远场辐射噪声在实际工程中不容易测量,因此很难直接以船体结构的辐射噪声作为振动控制的性能函数。研究表明,以浮筏隔振系统减振器与船体连接点处总的功率流作为振动控制的性能指标是较好的选择。但总的功率流对测量误差比较敏感,因此在实际振动控制系统中不太实用[3-5],只能以别的指标来代替。因此论文以浮筏隔振系统的隔振器与船体结构连接点处振动加速度响应的平方和作为同步定相控制的目标函数来研究同步定相技术在浮筏隔振和声辐射控制中的应用。

图1 典型浮筏隔振系统Fig.1 Schematic of a typical floating raft vibration isolation system
1.2 数学模型
浮筏隔振系统隔振器与船体结构连接点处(以下称为误差评价点)的加速度响应平方和可以写成如下矩阵的形式

式中:wm是一个m×1的列向量,为船体结构上m个隔振器安装位置处的加速度响应,可表示为

其中,fn是n×1的列向量,为浮筏上n个设备的激励力;Ymn为浮筏上n个设备到船体上m个隔振器安装位置处m×n的加速度导纳矩阵,可表示为

式中:yi为第i台设备到各个误差评价点的传递函数,为m×1的列向量。
激励力fn可写成复指数形式,Ai为第i台设备激励力幅值,φi为其对应的相位。

将式(3)、(4)代入(1)式可得

式中:‖y‖表示矩阵y的范数。
为了便于研究n台设备之间的相位关系,以第1台设备作为参考(参考设备),调节其他设备(调控设备)的相位,则式(5)可写成以下3部分之和,即

其中,

其中:

可见式(6)中的JA不包含相位信息,并且任意一台设备调整相位对其都没有影响,JB仅包含调控设备与参考设备之间的相位关系,JC则反映了各个调控设备之间的相位关系对目标函数的影响。
设定参考设备的相位φ1=0,调控设备的相位以参考设备为基准,其相对关系如图2所示。

图2 设备之间的相位关系Fig.2 The angles of the master equipment and slave equipments
考虑最简单的情况,当浮筏上只有2台设备时,目标函数可以简化为

为了使目标函数 J最小(控制目标),需要cos(θ21-φ2)=-1,此时目标函数最小时调控设备2的相位角为

因此,只要 θ21可知,φ2,min即可求得,同理可知对应目标函数最大时(最差情况)调控设备2的相位角为

由式(12)可知,θ21只与2台设备到误差评价点之间的传递函数有关。因此当浮筏上只有2台设备工作时,目标函数分别取最大值和最小值时对应的调控设备2的相位角,只与2台设备的安装位置和频率(转速)有关,与激励力的大小无关。但以下的关系是成立的:

即目标函数分别取最大值和最小值时对应的2个相位角之间的关系是确定的,只跟设备的数量有关。
当浮筏上有3台或3台以上的设备同时工作时,目标函数将同时包含JA、JB和JC。此时目标函数取最大值和最小值时对应的调控设备的相位角,不仅与这些设备的安装位置和频率(转速)相关,还与激励力的大小有关。
1.3 最优相位角的求解
最简单的求解最优相位的方法是从0°到360°以一确定的步长计算出目标函数的值,从中寻找出对应最小目标函数的最优相角。对一个特定的转速,n台设备需要(360/p)n-1步步长为p的求解寻优过程,这在实际操作中耗时较长,可行性较低。论文以PST理论为基础,结合二进制遗传算法进行优化求解。式(4)中设备的激励力向量fn可以写成矩阵乘积的形式

其中,A是一个n×n的对角阵,对角线上的元素为浮筏上n个设备激励力的幅值;φ是一个n×1的列向量,为浮筏上n个设备激励力的相位向量,具体形式如下所示:

代入目标函数可得

其中,Ψ=YmnA。对于特定的系统,矩阵Ψ将是固定的,而激励力的相位φ作为未知量决定目标函数J的大小。Ψ矩阵中各个元素在各个转速下的值可以通过m个传感器的n次测量来求得。经n次测量可得测量矩阵:

2 同步定相控制实验
2.1 实验台架介绍
基于弹性舱段结构上的浮筏隔振系统如图3,其中16根工字钢通过螺栓连接成6.25 m×5.25 m的浮筏结构,并通过18个BE-400隔振器和支座安装在弹性舱段结构上。弹性舱段尺寸为7 m×6 m×0.7 m,由厚度不同的钢板焊接而成。弹性舱段结构由26个空气弹簧支撑,模拟在水面上漂浮的状态。

图3 弹性舱段结构上的浮筏隔振系统Fig.3 Photograph of the floating raft vibration isolation system on the hull structure
4台由电机带动反向旋转的偏心质量对的激振设备(M1~M4)被用来模拟浮筏上的旋转或往复机械设备,其安装位置可见图3,其中一台的详细结构如图4所示。

图4 模拟旋转或往复机械的激振器Fig.4 One of exciters to simulate a rotating or reciprocating machine
激振设备的偏心质量块可通过调整重合度来调节旋转半径,从而在不同转速下产生一系列所需的简谐激励力。电机的输出轴上装有绝对式格雷码旋转编码器,编码器每圈位置数有8 192线,用来检测电机运转的速度、相位等信息,以供给基于西门子SIMOTIOND425运动控制系统的同步定相调控系统使用。该调控系统如图5所示,可以方便地调节4台电机的转速和相对相位。浮筏和舱段结构之间的连接除了18个BE-400隔振器,还安装有4台液压执行器(供浮筏主动隔振系统[23]使用),由于液压执行器内充有液压油,在它们不工作的时候,相当于被动隔振器。在舱段结构上这22个隔振器和液压执行机构的安装位置布置了22个加速度传感器,以它们输出的平方和作为同步定相控制的目标函数。同时在舱段结构四周布置了10个传声器,以监测整个舱段结构的声辐射。

图5 同步定相调控系统Fig.5 The regulating system of synchrophasing
2.2 同步定相调控实验
浮筏隔振及声辐射同步定相控制实验系统的控制框图和结构示意图如图6所示。其试验过程描述如下:先通过调控系统任意给定n组相位角,这些相位角经过D425运动控制系统调控激振设备的电机,而电机运转的速度和相位信息经过编码器和信号转换反馈回调控系统。同时激振设备引起的浮筏隔振系统的振动响应通过布置在舱段结构上的22个加速度传感器测量传给数据采集仪,生成测量矩阵Wmn。通过预先编制的遗传算法程序求解对应最小目标函数的最优相位解,再将最优相位解反馈给电机调控系统进行激振设备电机的相位调节,同时传声器记录各个工况下的声压值。
实验时激振设备电机分别选用1 800 r·min-1和2 400 r·min-1转速下的4种工况进行研究,4台激振设备在每种工况下输出的激励力幅值大小如表1所示。其中工况1和工况3中4台激振设备的激励力幅值相等,而工况2和工况4中4台激振设备的激励力幅值比分别为1∶1.28∶0.68∶0.35和1∶0.72∶0.57∶0.42。每种工况按同时工作的激振设备的数目和位置不同分不同的工作状态进行研究。

图6 同步定相控制实验系统Fig.6 Diagrams of the synchrophasing control system
2.3 实验结果及分析
在表1所示的4种工况下,同时开启不同数量和位置的激振设备(2台、3台和4台)进行实验。每种工作状态下,先测量n(同时开启的设备数量)组数据,生成测量矩阵Wmn,再通过预先编制的遗传算法程序求解目标函数最大和最小时各调控设备相对于参考设备的相对相位,反馈给调控系统驱动各激振设备的电机工作。
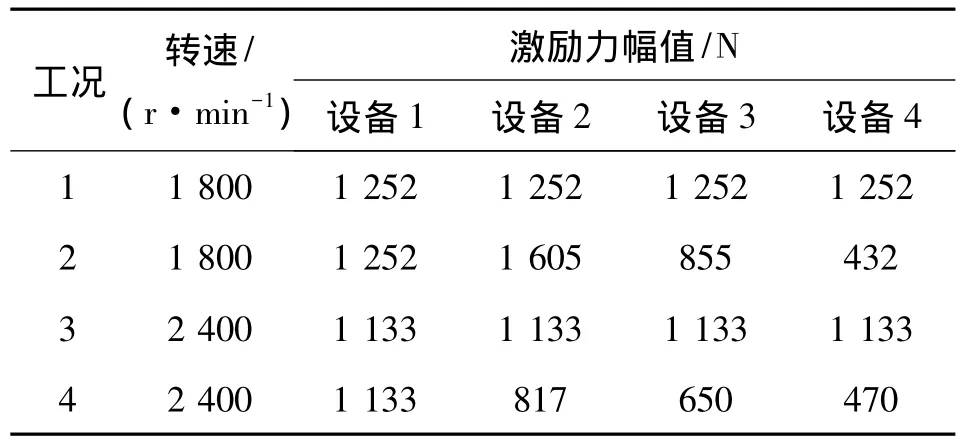
表1 各个工况下的激励力幅值Table 1 The amplitude of the exciting force at different cases
为了保证求解精度,每种工作状态测量n+1组数据对遗传算法进行求解。各组数据以及通过遗传算法得到的最优和最差相位时测得的目标函数,按从小到大的顺序绘出22个误差评价点的振动加速度响应平方和及对应的10个传声器声压均方和的柱状图,如图7~10所示(取对数标度时,加速度平方和基准为1(m·s-2)2,声压均方和基准为1 Pa)。

图7 2台设备M 1与M 4同步定相实验结果Fig.7 Experimental results of synchrophasing with two devices of M 1 and M 4

图8 2台设备M 1与M 2同步定相实验结果Fig.8 Experimental results of synchrophasing with two devices of M 1 and M 2

图9 3台设备M 1、M 2和M 4同步定相实验结果Fig.9 Experimental results of synchrophasing with three devices of M 1,M 2 and M 4
由图7~10可以明显看出,通过优化激振设备之间的相位关系,最优相位与最差相位情况下性能指标之比可以达到2.5~13.2 dB,同时辐射声压都有不同程度的减小,声压下降量可达1.8~20.4 dB。可见同步定相控制可以有效降低浮筏隔振系统向舱段的振动传递,从而减少舱段结构的声辐射。
当激振设备的转速为1 800 r·min-1时,目标函数的最大、最小值并不一定对应着辐射声压的最大和最小值,从而表现为虽然有较大的振动衰减量,但结构声辐射下降不明显。如图7所示,最优和最差性能指标之比达10 dB,而对应的辐射声压衰减量仅1.8 dB(2台设备同时工作,激励力幅值比为1∶1时)。图9显示,最优和最差性能指标之比达13 dB,而对应的辐射声压衰减量也仅有4.3 dB(3台设备同时工作,激励力幅值比为1∶1∶1时)。这是因为激振设备的转速为1 800 r·min-1时激励力频率为30 Hz,而整个浮筏隔振系统在30 Hz附近存在局部模态,体现为舱段结构底部肋板包围的矩形钢板类似四边固支时的一阶模态振型[33],而作为性能指标测量的传感器均布置在舱段结构的肋板上,因此体现为虽然性能指标有较大的衰减量,而结构声辐射的衰减不大。但随着激振设备的增加,由于是对称布置,因此产生局部振动的钢板也对称分布,反而有利于声辐射的控制。
2 400 r·min-1下的各个工况,目标函数最大和最小值对应着声压均方和的最大和最小值,表现为较大的振动衰减量对应着较大的结构声辐射下降量。如图7所示,最优和最差性能指标比8.4 dB对应着辐射声压17.26 dB的衰减量(2台设备同时工作,激励力幅值比为1∶1时),5.8 dB的最优和最差性能指标比对应着19.4 dB的辐射声压衰减量(2台设备同时工作,激励力幅值比为1∶0.42时)。当4台设备同时工作且激励力幅值比为1∶0.72∶0.57∶0.42时,4.4 dB的性能指标之比对应着20.4 dB的声压均方和落差,如图10所示。
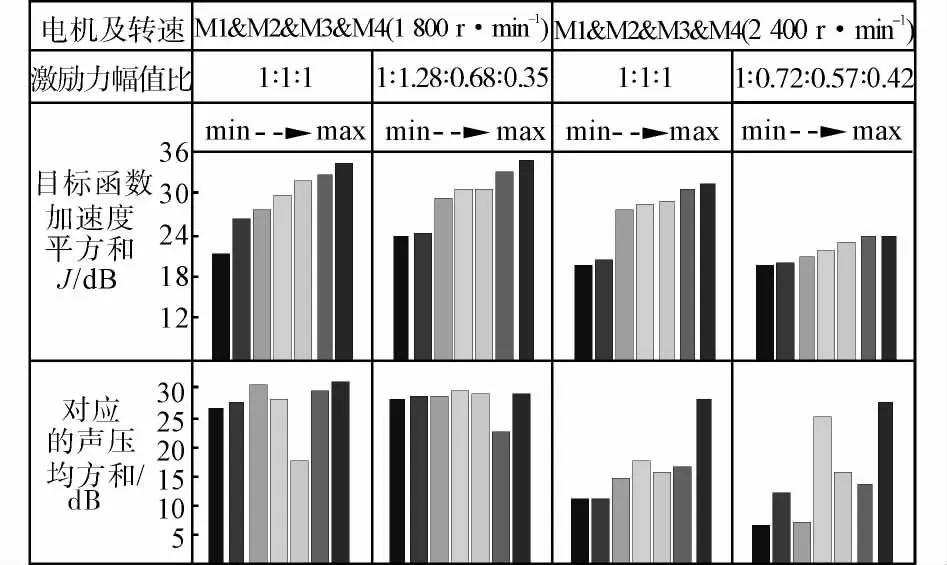
图10 4台设备M 1、M 2、M 3和M 4同步定相实验结果Fig.10 Experimental results of synchrophasing with four devices of M 1,M 2,M 3 and M 4
图11和图12分别给出了激振设备电机转速在2 400 r·min-1,同时启动4台设备且激励力幅值比为1∶1∶1∶1,目标函数最大和最小时,0~200 Hz范围内的22个误差评价点的加速度平方和及对应的10个传声器声压均方和曲线。由图中可以看出,当激振设备工作时,不仅激起了激振频率40 Hz处的振动响应,还激起倍频的响应(80、120、160 Hz)。通过同步定相控制,可以使各个频率处的振动响应大幅度降低,以整数倍频为例,加速度的平方和分别下降了10~51 dB;而且可以有效降低舱段结构的声辐射,激振频率和各整数倍频处辐射声压分别下降了12~26 dB。

图11 目标函数最大和最小时22个误差点的加速度平方和Fig.11 The sum of the squared acceleration responses measured by 22 error sensors when maxim izing and m inim izing the cost function

图12 目标函数最大和最小时10个传声器的声压均方和Fig.12 Themean squared of the sound pressures measured by 10 microphone sensors when maximizing and minimizing the cost function
对比图7和图8可以发现,激振设备的安装位置对目标函数的影响比较大,因此可以通过优化设备的安装位置来改善舱段结构的振动和声辐射。
2台设备同步定相控制时,目标函数取最大值和最小值所对应的相位角如表2,可见,目标函数最大和最小时的相位角差180°,和前面的理论推导结果一样。如前文所述,当只有2台设备时,目标函数最大和最小对应的相位,只与激振设备的安装位置和频率有关系,与激励力的大小无关。对比表中每种工作状态下不同激励力幅值时的相位可见,不同幅值比下的相位有4°~9°(1.03% ~2.5%)的误差,这是由于支撑整个浮筏隔振系统的26个空气弹簧在实验过程中有不同程度的漏气,造成实验过程中空气弹簧内的压力波动,使浮筏隔振系统的特性会发生一些变化,导致优化计算中的误差。
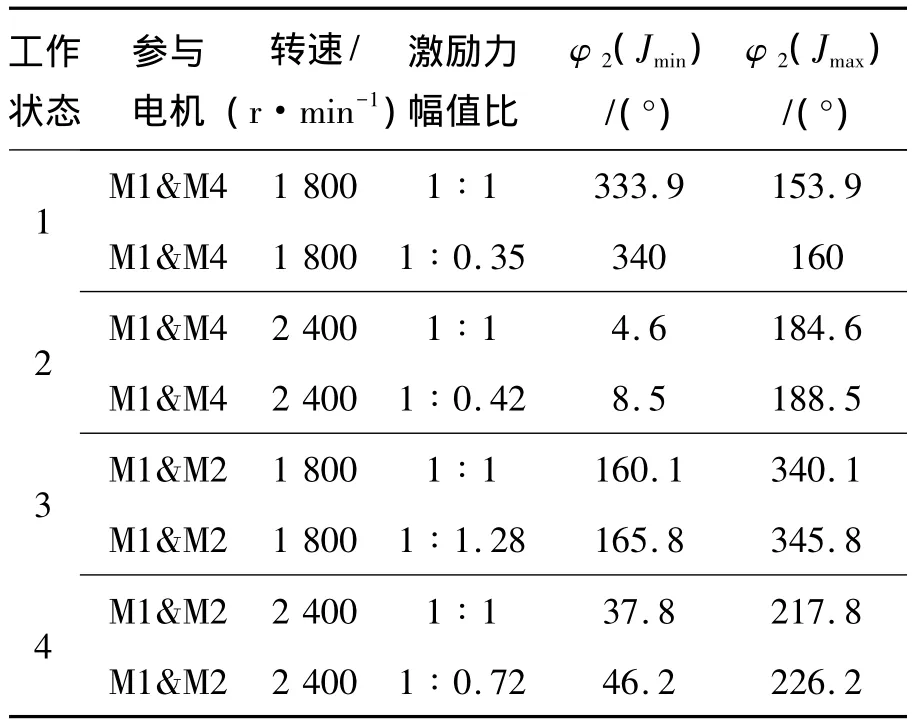
表2 两台设备同步定相控制时的最优与最差相位角Table 2 The minimize and maximize phase angles in the synchrophasing controlling with two equipments
3台设备同步定相控制时,目标函数取最大值和最小值时对应的相位角如表3所示。由表可知,目标函数最大和最小时的相位角没明显的规律,此时相位角不仅与设备的安装位置和频率(转速)相关,还与激励力的大小有关。

表3 3台设备同步定相控制时的最优与最优相位角Table 3 The minimize and maximize phase angles in the synchrophasing controlling with three equipments
3 结束语
针对弹性舱段结构上的浮筏隔振系统,开展了同步定相控制的理论和实验研究。研究结果表明:同步定相控制可以有效控制浮筏隔振系统的振动向舱段结构的传递,从而控制结构声辐射。
与振动主动控制技术相比,同步定相控制不需要额外的执行器及相应的控制系统,只需调节振动设备之间的相位关系,就能达到控制振动和声辐射的目的。
当只有2台设备时,目标函数分别取最大值和最小值时对应的相位角,只与2台设备的安装位置和频率(转速)有关,与激励力的大小无关。当多于2台设备时,这些相位不仅与设备的安装位置和频率(转速)有关,还与激励力的大小相关。
下一步将对其他旋转或往复机械激励源开展同步定相控制研究。
[1]严济宽.机械振动隔离技术[M].上海:上海科学计术文献出版社,1985:21-38,79-94.
[2]GORMAN RM.Design and advantages of two stagesmounting system of major machines in ship’s engine rooms[J].Shock and Vibration Bulletin,1966(35):227-234.
[3]顾仲权,朱德懋.振动控制评述[J].噪声与振动控制,1988(1):5-13.GU Zhongquan,ZHU Demao.A review of vibration control[J].Noise and Vibration Control,1988(1):5-13.
[4]严济宽.隔振降噪技术的新进展[J].噪声与振动控制,1991(5):11-16.YAN Jikuan.The development of vibration isolation and noise control[J].Noise and Vibration Control,1991(5):11-16.
[5]沈密群,严济宽.舰船浮筏装置工程实例[J].噪声与振动控制,1994(1):21-23.SHEN Miqun,YAN Jikuan.The engineering projects of floating raft in ships[J].Noise and Vibration Control,1994(1):21-23.
[6]FULLER CR,TOFFIN E.Passive-active isolator control of sound radiation from a raft-cylinder system[J].Journal of the Acoustical Society of America,1994,95(5):2987-2988.
[7]孙雪荣,朱锡.船舶水下结构噪声的研究概况与趋势[J]. 振动与冲击,2005,24(1):106-113.SUN Xuerong,ZHU Xi.Survey and tendency of study on the under water noise of ship structure[J].Journal of Vibration and Shock,2005,24(1):55-59.
[8]李维嘉,曹青松.船舶振动主动控制的研究进展与评述[J].中国造船,2007,48(2):68-79.LI Weijia,CAO Qingsong.Advances and review on the research of active control of ship vibration[J].Shipbuilding of China,2007,48(2):68-79.
[9]杨铁军,刘志刚,张文平,等.基于x-RLMS算法的自适应有源隔振技术研究[J].内燃机学报,2001,19(1):92-95.YANG Tiejun,LIU Zhigang,ZHANG Wenping,et al.Investigation in active vibration isolation based on x-RLMS algorithm[J].Transactions of CSICE,2001,19(1):92-95.
[10]杨铁军,顾仲权,刘志刚,等.双层隔振系统耦合振动主动控制试验研究[J].振动工程学报,2003,16(2):149-152.YANG Tiejun,GU Zhongquan,LIU Zhigang,et al.Experimental research on active control of coupled vibration for a two-stage isolation system[J].Journal of Vibration Engineering,2003,16(2):149-152.
[11]YANG Tiejun,ZHANG Xingyu,XIAO Youhong,et al.Adaptive vibration isolation system for marine engine[J].Journal of Marine Science and Application,2004,3(2):30-35.
[12]YANG T J,SUAIZ J,SUN Y,et al.Active vibration isolation system for a diesel engine[J].Noise Control Engineering Journal,2012,60(3):267-282.
[13]ZHANG Zhiyi,CHEN Yong,YIN Xuewen,et al.Active vibration isolation and underwater sound radiation control[J].Journal of Sound and Vibration,2008,318(4/5):725-736.
[14]张志谊,李增,黄修长,等.主动隔振与水下声辐射控制的实验研究[J].振动与冲击,2010,29(8):26-30,39,240.ZHANG Zhiyi,LIZeng,HUANG Xiuchang,et al.Experimental study on active vibration isolation and underwater sound radiation control[J].Journal of Vibration and Shock,2010,29(8):26-30,39,240.
[15]SWINBANKSM A.The active control of vibration& shock[C]//Engineered Adaptive Structures IV Conference.Banff,Canada,2004.
[16]NIU JC,SONG K J,LIM CW.On active vibration isolation of floating raft system[J].Journal of Sound and Vibration,2005,285:391-406.
[17]SUN H L,ZHANG K,ZHANG PQ,et al.Application of dynamic vibration absorbers in floating raft system[J].Applied Acoustics,2010,71:250-257.
[18]李嘉全.浮筏系统的振动主动控制技术研究[D].合肥:中国科技大学,2008:103-127.LI Jiaquan.Study on active vibration control of floating raft system[D].Hefei:University of Science and Technology of China,2008:103-127.
[19]宋春生.柔性浮筏系统的磁悬浮主动隔振理论与控制技术研究[D].武汉:武汉理工大学,2011:28-59.SONG Chunsheng.Study on theory and control technology of magnetic suspension active vibration isolation for flexible floating raft system[D].Wuhan:Wuhan University of Technology,2011:28-59.
[20]宋港,陈卫东.主动式自调谐吸振器在浮筏隔振系统中的应用[J].噪声与振动控制,2012,3:49-54.SONG Gang,CHEN Weidong.Application of active adaptive vibration absorbers in floating raft system[J].Noise and Vibration Control,2012,3:49-54.
[21]宋攀,董兴建,孟光.柔性基础主动隔振系统的缩聚建模和时滞问题研究[J].振动与冲击,2012,31(23):57-61.SONG Pan,DONG Xingjian,MENG Guang.Dynamic reduction modeling and time delay for an active vibration isolation system with flexible base[J].Journal of Vibration and Shock,2012,31(23):57-61.
[22]袁万朋,杨铁军,周刘彬,等.大型弹性隔振系统振动主动控制仿真研究[C]//现代振动与噪声控制.南京,中国,2012:166-170.
[23]周刘彬,杨铁军,张攀,等.基于弹性舱段结构的浮筏主动隔振系统实验研究[J].振动与冲击,2013,32(17):156-161.ZHOU Liubin,YANG Tiejun,ZHANG Pan,et al.Tests for an active floating raft vibration isolation system based on a flexible hull structure[J].Journal of Vibration and Shock,2013,32(17):156-161.
[24]YANG T J,DU J T,ZHU M G,et al.Active vibration isolation for a dieselengine generator in marine application[C]//CIMAC Congress 2013.Shanghai,China,2013.
[25]杨铁军,李新辉,朱明刚,等.船用柴油发电机组主动减振试验研究[J].振动工程学报,2013,26(2):160-168.YANG Tiejun,LIXinhui,ZHU Minggang,et al.Experimental investigation of active vibration control for dieselengine generators in marine applications[J].Journal of Vibration Engineering,2013,26(2):160-168.
[26]JONES JD,FULLER CR.Noise control characteristics of synchrophasing-an experimental investigation[C]//AIAA/NASA 9th Aeroacoustics Conference.Williamsburg,USA,1984.
[27]FULLER C R.Noise control characteristics of synchrophasing,Part 1:Analytical Investigation [J].AIAA Journal,1986,24(7):1063-1068.
[28]BLUNTD M,REBBECHIB.An investigation into active synchrophasing for cabin noise and vibration reduction in propeller aircraft[C]//ACTIVE 2006.Adelaide,Australia,2006.
[29]BLUNT D M,REBBECHIB.Propeller synchrophase angle optimisation study[C]//13th AIAA/CEAS Aeroacoustics Conference(28th AIAA Aeroacoustics Conference).Rome,Italy,2007.
[30]BLUNT D M.Optimisstion and adaptive control of aircraft propeller synchrophase angles[D].Adelaide:University of Adelaide,2012:18-50.
[31]PAN J,HANSEN CH.Active control of power flow from a vibrating rigid body to a flexible panel through two active isolators[J].Journal of the Acoustical Society of America,1993,93(4):1947-1953.
[32]GARDONIO P,ELLIOTT S J,PINNINGTON R J.Active isolation of structure vibration on amultiple-degree- of -freedom system,Part II:effectiveness of active control strategies[J].Journal of Sound and Vibration,1997,207(1):77-96.
[33]ZHOU Liubin,YANG Tiejun,YUAN Wanpeng,et al.The vibration characteristics of a large flexible vibration isolation structure with finite element analysis and modal test[C]//Advanced Materials Research.Guilin,China,2011:858-864.