M元仿海豚叫声隐蔽水声通信
2014-10-25刘凇佐刘冰洁尹艳玲乔钢
刘凇佐,刘冰洁,尹艳玲,乔钢
(1.哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
近年来,越来越多的海洋环境监测、资源开发以及水下军事项目的遥控、调度的实施严重依赖于水声通信技术,这种依赖性暴露了很多安全隐患,给敌方带来了可乘之机,因此新形式下对水声通信技术除稳健可靠外提出了隐蔽性的要求。
传统的隐蔽水声通信方法多从低信噪比角度出发,将信号隐藏在海洋背景噪声中实现LPI/LPD(low probability of interception/detection)的效果。文献[1-2]提出了一种应用于低信噪比的多频带OFDM调制技术,利用频率分集技术提高低信噪比条件下的通信效果,该体制中带宽为3.6 kHz,并被划分成16个子带。当通信距离达到52 km时,通信速率为78 bit/s,信噪比可以降低至-8 dB,在低通信速率的条件下,信噪比可以达到-16 dB。但是,如果信噪比过低,这种通信体制将因为无法探测到通信信号而崩溃。文献[3]基于扩频技术提出了一种对相位跳变不敏感的能量检测器,利用海试数据,在信噪比最低-10 dB条件下可以实现对数据的正确解调。文献[4]在扩频信号解调中采用匹配滤波器技术估计时变信道冲激响应,在信噪比-12 dB条件下误码率小于10-2。文献[5-6]采用非相干水声通信技术,提出了双正交调制和双差分相移键控,2种体制均应用了DSSS技术和RAKE接收机。
然而,传统低信噪比隐蔽水声通信方法尽管降低了发射信号的平均功率,但相对探测声呐来讲,一方面,长时间积分还是可以探测出通信信号存在,进而可以测量出目标方位或距离,这对军事水下通信来讲是无法容忍的;另一方面,降低通信信号发射功率实现隐蔽通信,限制了通信距离,同时即便在接收端实现低信噪比隐蔽通信,但如果在信号的发射点和接收点之间有一个探测设备,也很容易探测到通信信号。
基于这种问题,本文从仿生伪装角度出发[7-8],提出一种可以在全距离范围内实现隐蔽水声通信的方法。借鉴脉位调制技术[9],改进其信息码元形式,利用海豚嘀嗒声作为脉冲信号进行通信,信息调制在相邻嘀嗒声的时间间隔上,调制后的信号与原始海豚叫声信号在声音上没有明显区别,具有更高的隐蔽性。通信过程中,采用高声源级真实或模拟本地海洋生物的叫声信号作为信息码元进行通信。即使信号被声呐在探测阶段发现,也会在其识别阶段被当作海洋生物噪声排除,达到远程隐蔽通信的目的。采用M元技术提高通信速率,匹配追踪算法估计信道冲激响应,RAKE接收机抑制水声信道多途影响,并进行了仿真和湖试。
1 M元仿生通信原理
海豚信号大体可以分为3类:通讯信号(哨声信号)、被称为click(嘀嗒声)的定位信号、应急和模拟信号。通讯信号一般持续时间从十分之几秒到几秒,其主要能量集中在声频范围内,是一种调幅和调频脉冲信号,具有良好的自相关特性。定位信号持续时间从千分之几秒到百分之几秒,信号能量集中在较宽的超声频范围内。通常,海豚会在一段时间内发出具有不同时间间隔的一连串嘀嗒声信号,每个信号具有各自不同的时、频域特性。应急和模拟信号研究的较少,一般是生物学家感兴趣的领域[10-11]。
根据海豚click信号的声音特性,本文将信息以时延差的形式调制在相邻的click信号之间,以不破坏原海豚叫声信号特点为前提,通过改变不同嘀嗒声在时域上的位置,实现信息调制,隐蔽传输信息。
在实际工作中,对click信号进行搜集和分析,针对不同的应用需求,选择不同的click信号进行编码。例如在不同的海域,不同的季节海豚的叫声也会发生相应改变,应选择相应的叫声信号。基于此,针对不同的工作环境和技术要求,应建立可供信号调制使用的信号码样本库,并对样本库中的叫声信号进行灵活调整。
1.1 信息调制
本文采用一些相关性良好的的click信号进行DPIM(digital pulse intervalmodulation)调制,以信号码之间的时延差长度代表不同的信息。该调制技术成熟简单、传输稳定、功耗低、在速率要求不高的情况下,对信道随机不均匀性有较强的抗干扰能力,适合在水声信道下工作[12]。在此基础上,将DPIM调制与M元技术结合,采用不同的click信号码作为码元,在不破坏海豚叫声特点的前提下,仅通过改变不同click信号在不同码元窗上的位置进行信息调制,实现对M元click信号的DPIM调制。M元技术的应用可以更加有效抑制水声信道中多途扩展引起的码间干扰,携带更多地信息,提高系统通信速率。

图1 M元click编码Fig.1 M-ary click DPIM
图1给出了一组码元结构,L个不同的click码的相互独立。图中,ti表示第i个click码对应的时延差值;Tpi表示第i个click信号的脉宽;To为码元窗宽度;编码时间Tci=To-Tpi。设每个码元携带n bit信息,则码元窗宽度必须满足不小于最大click码脉宽与2n*Δδ之和,其中Δδ为量化间隔。每个码元不同的click码及不同的时延差ti=k*Δδ,k=0,1,...,2n-1 代表不同的信息。click 码种类越多,时延估计的精度越高,每个码元所携带的信息量越大。此时系统的通信速率如下:

式中:N为信号码样本库中click信号码的总数目,n为每个码元窗内click码所携带的信息比特数。从式(1)中可以看出,将M元技术与DPIM技术相结合可提高通信速率。
为了实现信号的同步识别和多普勒估计,设计了相应的帧结构,在一帧仿生通信信号的开始和结尾处分别加入2个不同的海豚哨声信号。哨声信号持续时间长,带宽大。将接收信号与本地的哨声信号相关,可以得到明显的相关峰,据此,实现信号的同步与识别。结合前面介绍的信息编码部分,得到基于海豚叫声信号的M元仿生信号帧结构,如图2所示。其中,同步信号与信息编码信号之间插入零序列作为保护间隔,防止由多径引起的同步信号与数据符号之间的串扰。

图2 仿生信号帧结构Fig.2 Frame structure of bionic signal
1.2 解调原理
发射信号时,首先将调制信息进行串/并转换,分别进行m元码元调制和每个click码元的DPIM调制。click信号样本库中可用的click码型越多,发送端信号码的选择范围越大,可组合成的发射信号种类越多,信息量越大。其工作原理如图3所示,a(t)为信源数字信息,由码选择器根据数字信息依次从click码样本库中选取对应编号的m个信号码,DPIM信息调制器则根据数字信息余下内容对选取的信号码按照上节所述方法进行编码,生成的发射信号s(t)由发射机功放送入水声信道中。经过水声信道,在接收端由信号采集器得到的信号为

式中:h(t)为信道冲激响应函数;n(t)为加性环境噪声。

图3 仿生通信系统流程Fig.3 Flow chart of bionic communication system
由于水声信道的特点,发射出的声线将经过海面和海底的多次反射汇聚于接收端,复杂的多途结构[13]将严重影响水声通信系统的解码性能。为此,在接收端应采用适当的信道均衡方法,改善通信系统的接收性能。本通信体制中具体的信道估计与均衡方法将在下一节详细介绍。
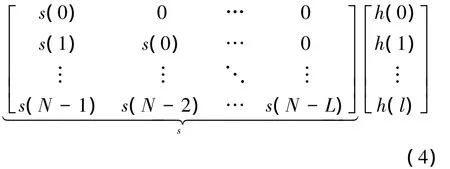
为了确定每个码元中click信号码的编号,由信号分割器将接收信号的每个码元窗分割开,M个click码分别与信号码样本库中的每一个样本进行相关处理,其中任意接收信号码元窗ri(t)与信号码样本库中第j个信号拷贝相关的输出结果为:

式中:To为码元宽度,cj(t)为接收端从信号码样本库中抽取的编号为j的click信号码。
样本库中的click信号码往往具有不同的能量,为了避免相关最大值判决可能产生的误码,这里定义相关处理之后的信噪比为相关信噪比,采用最大相关信噪比判决器进行判决,由产生最大相关信噪比的样本库信号确定该码元中信号码的编号,由其相关峰的位置确定时延差,进而可由译码器解调出信号所携带的信息。
2 M元仿生通信信道估计与均衡技术
水声信道是由一系列不同时延、不同幅度的脉冲串叠加而成的。当声波沿不同路径到达接收端时,由于路径的差异,将造成到达接收端各路径信号能量、时间以及相位的不同,最终引起信号的衰落,造成波形畸变,影响水声通信系统的解码性能[14]。如果在接收端能够将多条路径传来的信号分离开,就有可能分别校正各条路径接收信号的相位,并进行同相相加,从而克服衰落现象,这种技术称为多径分离合并技术。在本文提出的仿生通信体制中,码元为不规则的脉冲信号,为克服信道多径带来的影响,本文采用 MP算法估计信道多径分量,采用RAKE接收机实现信号多径分量的合并。
2.1 信道估计技术
本文采用压缩感知理论[15]中的 MP 算法[16]实现以海洋生物叫声为探测序列的信道估计,以确定RAKE接收机的加权系数值。MP算法的基本思想是在每一次的迭代过程中,从过完备原子库S中(字典)选择与信号最匹配的原子来构建信号的稀疏逼近,然后求出逼近后的残差。继续从过完备原子库中选择与残差最匹配的原子,并更新残差。经过多次迭代,直到满足标准为止。这个标准通常是残差小于某个很小的值,或者迭代次数满足一定值,当残差值与噪声值可比拟时,停止迭代即可。接收信号可以表示为:


式中:h∈RR为待估计的稀疏信号,r∈RN为观测向量,S∈RN×M,且N <M,S可表示为其中,si∈ RN,i=1,2,...,M ,通常称 S 为词典或原子库,si为词典中的原子。本文中发射信号为词典,接收信号为观测向量,信道冲激响应为待估计的稀疏信号,MP算法流程为:
初始化:残差d0=r,信号估计h0=0和迭代次数k=0
条件判断:当 ‖S hk-r‖2>γ时,k=k+1
选择:λk+1=argmaxj< dk,sj> ,φj∈ Φ
更新:hk=hk-1+〈dk-1,sλκ+1〉sλk+1,dk=r-S hk
如果:‖S hk-r‖2<γ迭代终止。
其中,λk是被选中的原子在字典S中的标号,例如第k步选出的原子是字典中的sλk原子。γ是一个很小的常量,代表给定的残差门限。
2.2 RAKE接收机
RAKE接收机充分利用码元的相关特性,聚焦多途信号分量,以达到增加有用信号能量,改善通信系统的接收性能的目的。RAKE接收机包括多个相关器,每个相关器接收一路多径信号,然后根据每个相关器输出的相对强度进行加权求和,合成一个输出,以提供优于单路相关器的信号检测,在此基础上进行解调和判决,加权系数的选择是使输出信噪比最大。

图4 RAKE接收机工作原理Fig.4 RAKE receiver schematic
图4为RAKE接收机工作原理图。实际工作中,经过调制后的仿生信号s(t)经过水声多途信道传输,接收信号r(t)到达接收端。在该图中,以3条路径情况为例,它们的时延分别为τ1、τ2和τ3,对应的衰减因子则为α1、α2、α3。在RAKE接收机中,利用上一节技术中估计出的信道冲激响应,进行相应的延时、加权求和。图中,3个相关器的输出zi(t)分别与加权系数hi(其中,i=1,2,3)相乘,则总的输出信号为

3 仿真研究及湖试结果
为验证本文提出的基于仿生学隐蔽通信系统的可行性和系统性能,进行了仿真研究和湖上实验。
3.1 仿真研究
根据海豚叫声信号特点,选取8个自相关性和互相关性良好的叫声信号作为信息码元,构成仿生信号码样本库,则每个click码信号携带3 bit数字信息。样本库中click信号长度从83 ms到180 ms不等。每个码元窗长主为样本库中最长click信号长度与时延编码长度之和,每个码元的时延编码部分携带6 bit信息,量化间隔Δδ为1 ms,则最大时延长度为64 ms.仿真中以每帧信号中7个click信号为例,根据调制信息按照第1节中方法进行调制,同时插入同步信号,合成如图2所示帧结构,仿真得到的发射信号如图5所示。

图5 发射信号Fig.5 Transm itted signal

图6 水声信道冲激响应Fig.6 Underwater acoustic channel impulse response
图6是一个实测的水声信道冲激响应,从该图可以看出,该信道多途结构复杂,信号经过这样的多途信道将对接收端的解码性能造成严重影响。所以将接收到的仿生信号经过RAKE接收机进行多径分量合并是必要的,以保证后续解码的正常进行。首先通过海豚的哨声信号实现信号的同步与识别,以区分是海洋中真实的叫声信号还是仿生信号。通过系统同步提取出海豚的哨声信号,使用2.1节介绍的MP方法对其进行处理,归一化残差值0.1。得到的水声信道冲激响应如图7所示。
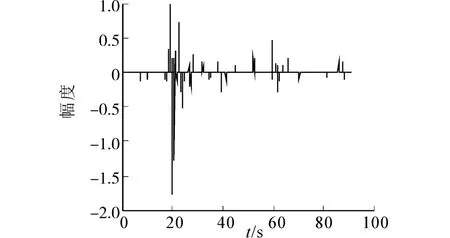
图7 M P信道估计结果Fig.7 Channel response estimated by MP
利用估计出的信道冲激响应,仿生信号经过RAKE接收机后进行解码。根据设定的码元长度,可将每一个码元窗分别截取并与信号码样本库中的嘀嗒声信号依次相关,通过相关信噪比进行码元判别。对截取的其中一段码元窗分别与仿生信号码样本库中的所有click信号相关得到的结果如图8。

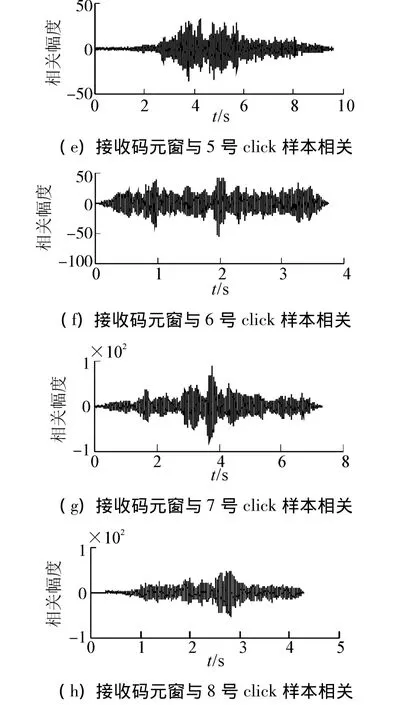
图8 仿真相关结果Fig.8 Correlation results of simulation
从图中可以看出,接收码元窗与信号码样本库中的4号click信号相关后,可以得到明显的相关峰,经计算相关信噪比最大,由此可以判断在发送端进行信号编码时,此码元窗中的信号码选取的是信号码样本库中的4号click信号,进而解码出相应码元调制的数字信息。同时,根据4号click信号与接收码元窗相关得到的相关峰位置,可得出该码元窗的时延差值,并进一步解码出相应时延编码数字信息。对7个码元窗分别进行这样的处理,就可以得到完整的发送数字信息,实现接收端解码。在仿真实验中,由于信道的复杂多途结构,使得接收端的RAKE均衡变得尤为重要。仿真实验所得的RAKE均衡误码率图和无RAKE均衡如图9所示。
从图中的曲线分布可以看出,当信噪比较小的时候,均衡后的误码率大于未均衡的误码率,这主要是因为低信噪比下信道估计存在的误差影响了RAKE均衡的效果。当信噪比升高时,均衡后的信号误码率迅速降低,当信噪比大于-3 dB时,误码率为0,而未均衡的信号误码率降低较慢,当信噪比大于-3 dB后,由于信道多途影响,误码率没有明显变化,产生了误码平层。此外,信号误码率对click信号的选择有很强的依赖性。选择长度、带宽较大的click信号,可以有效降低系统误码率。

图9 RAKE均衡前后的误码率Fig.9 BER results before and after RAKE receiver
3.2 湖试结果
为验证M元仿海豚叫声隐蔽水声通信方法在外场真实水声信道条件下性能,于2012年10月在黑龙江省牡丹江市莲花湖进行了湖试实验。莲花湖呈狭长型,平均水深约40 m左右,其中发射节点(信源)和接收节点(信宿)分别位于2条自由漂泊的船上,布放深度5 m,两船相距3 km,发动机均关闭,在风力与水流的作用下具有缓慢的相对运动。
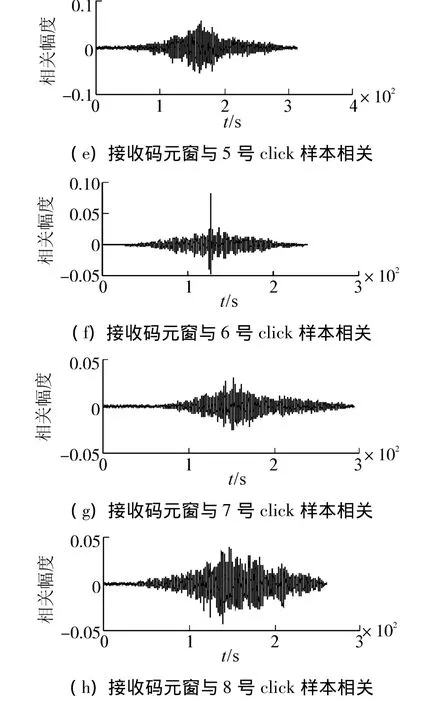
图10 实验相关结果Fig.10 Correlation results of the lake trial
实验中,发射信号与仿真环境下信号参数相同,在信号接收端,经过RAKE接收机处理后,对截取的其中一段码元窗分别与仿生信号码样本库中的所有click信号进行相关处理,结果如图10所示。
从图中可以看出,截取的该段码元窗只有与6号click信号相关时,可以得到明显的相关峰,由此可以判断,在发送端编码时,该码元窗中的click信号选取的是信号码样本库中的6号click信号。同时,根据接收码元窗与6号click信号相关后相关峰的位置,可以获取时延差。对其进行码元解调和时延编码解调后,即可获得该码元窗的解调结果。其余码元窗采用同样的解调处理方法,可以进一步得到该帧信号完整的解码结果。实验结果表明,在外场湖试条件下,信道均衡前,误码率达20%左右,均衡后可以达到无误码。
4 结束语
本文基于仿生学原理,从仿生伪装角度出发,提出利用海洋中固有的生物叫声作为码元实现隐蔽水声通信,避免了低信噪比隐蔽水声通信造成通信距离受限以及不能在全通信距离范围内实现隐蔽通信的问题。通信过程中,信息调制在海豚嘀嗒叫声时间间隔上,采用M元技术提高通信速率,改进传统方法中以相关峰作为判决门限的方法,以相关信噪比作为判决准则实现码元判别,应用匹配追踪算法实现了以海豚叫声信号为探测序列的信道估计,采用RAKE接收机技术实现多径分量的合并,抵抗水声多途信道的影响。仿真和湖试结果均验证了该方法的可行性,黑龙江省莲花湖实验中,水平通信距离3 km,通信速率69 bit/s,误码率小于10-4。
[1]GEERT L,PAUL V W.Multiband OFDM for covert acoustic communications[J].IEEE Journal on Selected Areas in Communications,2008,26:1662-1673.
[2]GEERT L,PAULVW,JEROEN B,et al.Covertunder water communications with multib and OFDM [C]//Oceans.Quebec City,Canada,2008:1-8.
[3]YANG T C,YANG W B.Low probability of detection underwater acoustic communications using direct-sequence spread spectrum [J].Journal of the Acoustical Society of America,2008,124:3632-3647.
[4]YANG T C,YANGW B.Performance analysis of direct-sequence spread-spectrum underwater acoustic communications with low signal-to-noise-ratio input signals[J].Journal of the Acoustical Society of America,2008,123:842-855.
[5]LING Jun,HE Hao,LIJia.Covertunder water acoustic communications[J].Journal of the Acoustical Society of America,2010,128:2898-2909.
[6]LING Jun,HE Hao,LI Jian.Covert underwater acoustic communications:transceiver structures,waveform designs and associated performances[C]//Oceans 2010 MTS/IEEE Conferenc.Seattle,2010:20-23.
[7]LIU Songzuo,QIAO Gang,ISMAIL A.Covert underwater acoustic communication using dolphin sounds[J].Journal of the Acoustical Society of America,2013,133(4):EL300-EL306.
[8]LIU Songzuo,QIAO Gang,ISMAIL A,et al.Covert underwater acoustic communication using whale noise masking on DSSS signal[C]//OCEANS 2013 MTS/IEEE Conferenc.Bergen,Norway,2013:1-6.
[9]殷敬伟.多途信道中Pattern时延差编码水声通信研究[D].哈尔滨:哈尔滨工程大学,2007:18-39.YIN Jingwei.A study of pattern time delay shift coding communicationin underwater acoustic multipath channel[D].Harbin:Harbin Engineering University,2007:18-39.
[10]FINNERAN JJ.Dolphin"packet"use during long-range echolocation tasks[J].Journal of the Acoustical Society of America,2013,133(3):1796-1810.
[11]牛富强,杨燕明,文洪涛,等.瓶鼻海豚的click声信号特性[J]. 声学技术,2011(2):40-44.NIU Fuqiang,YANG Yanming,WEN Hongtao,et al.Characteristics of bottlenose dolphins click signal[J].Technical Acoustics,2011(2):40-44.
[12]惠俊英,刘丽,刘宏,等.Pattern时延差编码水声通信研究 [J]. 声学学报,1999,24(6):561-572.HUI Junying,LIU Li,LIU Hong,et al.A study on pattern time delay coding underwater acoustic communication[J].Acta Acoustic,1999,24(6):561-572.
[13]XU Xiaoka,ZHOU Shengli,MOROZOV A K,et al.Persurvivor processing for underwater acoustic communications with direct-sequence spread spectrum. [J].Journal of A-coustical Society of America,2013,133:2746-2754.
[14]XU Xiaoka,WANG Zhaohui,ZHOU Shengli,et al.Parameterizing both path amplitude and delay variations of underwater acoustic channels for block decoding of orthogonal frequency division multiplexing[J].Journal of Acoustical Society of America,2012,131:4672-4679.
[15]DONOHO D L.Compressed sensing[J].Transactions on Information Theory,2006,52(4):1289.
[16]COTTER S F,RAO B D.Sparse channel estimation via matching pursuit with application to equalization [J].Transactions on Communications,2002,50:374-377.