履带车辆软地面稳态转向驱动力计算模型
2014-10-15曹付义周志立
曹付义,刘 洋,周志立
(河南科技大学车辆与动力工程学院,河南洛阳471003)
0 引言
遥控驾驶和自主行驶履带车辆正逐渐引起人们的广泛关注和深入研究,被用于完成农业、军事、航天及矿业等高危险性或重复性作业[1-2]。转向行驶控制技术是遥控驾驶和自主行驶履带车辆最基本的关键技术,掌握其转向时的运动学及动力学特性是实现其转向行驶控制的前提,也是其行走装置结构设计及参数优化的理论依据。由于履带与地面相互作用的复杂性,早期转向驱动力计算模型不考虑履带下陷、滑转(滑移)及转向中心偏移等,导出了一些便于工程估算用的计算模型[3-4]。目前,较多文献考虑履带下陷、滑转及转向中心偏移等因素,从转向运动学、动力学及履带与地面的相互运动关系出发,经一定简化或采用经验计算对履带车辆转向驱动力计算模型进行了研究[5-9]。尽管国内外学者建立了多种履带车辆转向动力学模型,但由于履带车辆转向时接地履带与地面相互运动及作用力变化的复杂性,目前已有转向驱动力计算模型并未考虑这些因素的综合影响,不能反映履带车辆转向驱动力的真实变化。为实现履带车辆的遥控驾驶和自主行驶,有必要建立履带车辆软地面稳态转向驱动力计算模型。
基于接地履带相对地面产生剪切位移、剪切应力及履带滑转(滑移)及转向中心偏移等的基本事实,通过对接地履带剪切位移计算式的引入,建立履带车辆软地面稳态转向驱动力计算模型,参考某型号橡胶履带拖拉机,采用试验及仿真分析方法,对履带车辆软地面稳态转向驱动力变化进行研究,从而为履带车辆行走装置结构设计、参数优化及驱动力在线预测提供理论基础。
1 转向运动学分析
为简化分析过程,假定履带车辆在水平地面稳态转向行驶,车辆做平面运动,履带做复合运动,其转向运动关系如图1所示。
XoY为惯性坐标系,x1o1y1、x2o2y2分别为固结于外、内侧接地履带的动坐标系,ZC为履带车辆转向中心,c为履带车辆质心,o'、o″分别为外、内侧接地履带的速度瞬心,由于滑转(滑移)的存在,外、内侧接地履带的速度瞬心分别偏离各自几何中心o1、o2的距离为A1、A2。当履带车辆高速转向或挂接工作装置转向时,由于离心力或工作阻力的作用,使车辆的转向中心线向前(后)相对其横向中心线产生偏移量e。

图1 履带车辆转向运动图
在外侧接地履带上任取一点,该点在XoY坐标系下的剪切位移在X和Y方向分别为[7]:

式中,R'为履带车辆转向中心到质心的横向垂直距离,m;B为履带轨距,m;cx为质心横向偏移,m;cy为质心纵向偏移,m;x1、y1为外侧接地履带上任一点坐标值,m;L为履带接地长度,m;r为履带驱动轮半径,m;ω0为外侧履带驱动轮角速度,rad/s。
外侧接地履带上任一点在XoY坐标系下的剪切位移为:

同理,内侧接地履带上任一点在XoY坐标系下的剪切位移在X和Y方向分别为[7]:

式中,x2、y2为内侧接地履带上任一点坐标值,m;ωi为内侧履带驱动轮角速度,rad/s。
内侧接地履带上任一点在XoY坐标系下的剪切位移为:

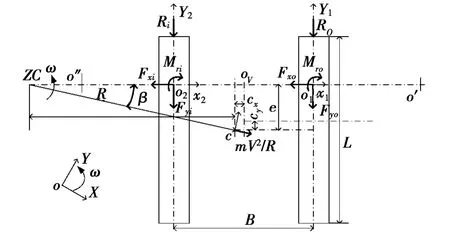
图2 履带车辆转向受力图
2 转向动力学模型
履带车辆转向时水平面内的受力如图2所示。履带车辆受到纵向作用力(内侧履带Fyi、外侧履带Fyo)、横向作用力(内侧履带Fxi、外侧履带Fxo)及滚动阻力(内侧履带Ri、外侧履带Ro)等共同作用,对高速转向的履带车辆还要考虑转向离心力mV2/R影响。
横向作用力和纵向作用力均来自于接地履带使地面产生剪应力而引起的驱动力。横向作用力表现为转向阻力,对履带车辆产生转向阻力距,两侧纵向作用力之差产生转向力矩。
接地履带使地面产生剪应力而引起的驱动力为[10]:

式中,τo,i为地面剪应力,kN/m2;S为履带接地面积,m2;c为土壤黏性系数,Pa;σo,i为履带接地压力,kN/m2;φ为土壤内聚角,(°);k为地面剪切变形模量,m。
由此可得,图2中外(内)侧接地履带的横向作用力和纵向作用力可分别按下式计算:

式中,δo,i为外(内)侧接地履带上任一点滑转(滑移)速度与动坐标系中x方向的夹角,可按下式计算:

外(内)侧接地履带驱动力为:

由外(内)侧接地履带所受的纵向作用力对oV(转向中心线与车辆纵向几何中心线交点)产生的转向力矩为:

3 试验及仿真分析
为验证上述模型的正确性及合理性,以某型号橡胶履带拖拉机为研究对象[11]进行试验和仿真分析,试验和仿真地面为干沙地面,其地面土壤特性参数见表1。

表1 地面土壤特性参数
3.1 试验验证
试验时首先通过发动机油门控制机构设定发动机转速,通过变速操纵机构设定变速箱挡位,使拖拉机在设定的发动机转速和变速箱挡位开始转向行驶,待行驶稳定后,测试拖拉机两侧驱动轮转矩。保持发动机转速不变,改变变速箱挡位,进行不同挡位下的转向行驶试验。

图3 外(内)侧履带转向力矩变化曲线
图3 为不同挡位下拖拉机外(内)侧履带转向力距随转向半径的变化关系。由图3可知:若不考虑测量误差和仿真设置参数与真实地面参数存在误差,采用本文模型得到的转向力矩仿真结果与试验结果有较好一致性,验证了本文模型的正确性。
3.2 仿真分析
3.2.1 接地履带滑转(滑移)分析
接地履带滑转(滑移)是履带车辆转向的基本特征,用履带滑转(滑移)率表示,外、内侧履带滑转(滑移)率按下式:

根据上述转向运动学及动力学模型,计算外、内侧接地履带上任一点的纵、横向作用力的大小,参考图1可确定外、内侧接地履带的速度瞬心位置,从而可计算R'、A1、A2值,仿真分析外、内侧履带滑转(滑移)率随转向半径的变化关系。外、内侧履带滑移(滑转)率随转向半径的变化关系如图4所示。在同一外、内侧履带速比下,当转向半径增大时,履带车辆的转向离心力增大,从而使履带滑转(滑移)率增大;对于同一转向半径,随着外、内侧履带速比的增大,履带车辆的转向离心力也增大,履带滑转(滑移)率也随着增大,并且,外侧履带滑转率小于内侧履带滑移率,图4的仿真结果较好反映了这一变化趋势。
3.2.2 接地履带结构参数分析
履带车辆结构复杂,影响其转向驱动力的因素较多,根据本文模型可仿真分析履带接地长度及履带接地宽度等结构参数对履带车辆稳态转向驱动力的影响。
图5a和图5b分别为仅改变履带接地长度和接地宽度、其他参数不变情况下,履带车辆外、内侧履带驱动力随转向半径的变化关系。由图5可知:在同一转向半径下,随着履带接地长度的增加,履带车辆外、内侧履带驱动力增大,相反,车辆外、内侧履带驱动力随履带接地宽度的增加而减小。外侧履带驱动力总大于内侧履带制动(驱动)力。
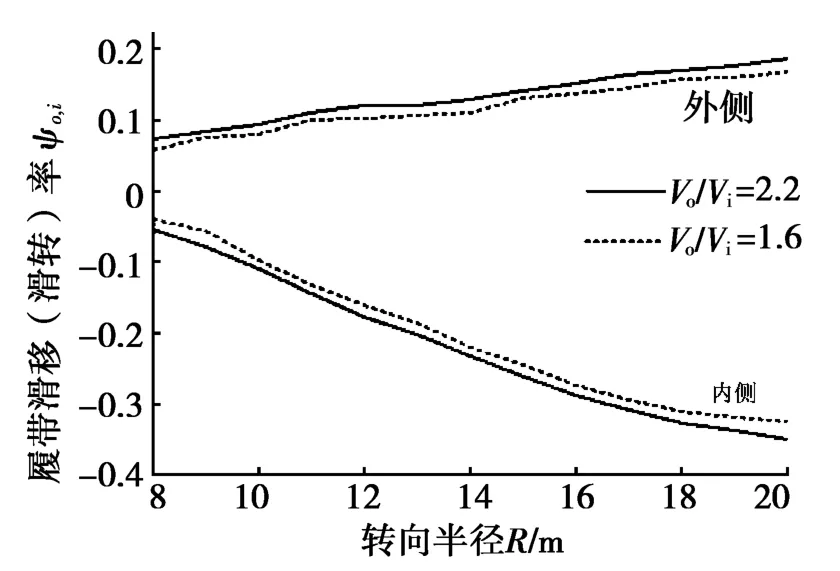
图4 外(内)侧履带滑转(滑移)变化曲线

图5 外(内)侧履带驱动力变化曲线
4 结论
考虑履带车辆转向时接地履带的滑转(滑移)及转向中心偏移等因素,建立了履带车辆软地面稳态转向驱动力计算模型。若不考虑测量误差和仿真设置参数与真实地面参数的误差,采用本模型得到的转向驱动力仿真计算结果与试验值有较好一致性,能较真实反映履带车辆实际转向驱动力变化,本模型可为履带车辆行走装置结构参数设计及驱动力在线预测提供理论依据。
[1]迟媛.动力差速转向机构履带车辆载荷比与转向系数的关系[J].农业工程学报,2012,28(18):44-48.
[2]Tran D T,Brien J O,Muro T.An Optimal Method for the Design of a Robotic Tracked Vehicle to Operate over Fresh Concrete under Steering Motion[J].Journal of Terramechanics,2010,39(3):1-22.
[3]曹付义,周志立,徐立友.双流传动履带车辆方向盘操纵系统设计及仿真[J].河南科技大学学报:自然科学版,2011,32(3):16-19.
[4]孙强,白书战,李国祥.履带式推土机动力传动系统推土工况建模与仿真[J].农业工程学报,2012,28(7):57-61.
[5]Desrial,Ito N.Application of Computer-Based Pivot Turn Control System for the Tracked Vehicle[J].Journal of JSAM,2003,65(5):35-39.
[6]成凯,张俊,曲振东.铰接履带车转向及俯仰性能研究[J].兵工学报,2012,33(2):134-141.
[7]Kar M K.Prediction of Track Forces in Skid-steering of Military Tracked Vehicle[J].Journal of Terramechanics,2008,45(2):113-125.
[8]欧屹,钱林方,陶卫军.基于土-履应变的履带机器人转向阻力矩建模与分析[J].南京理工大学学报:自然科学版,2012,36(3):516-521.
[9]Said A M,Lakmal D S,Kaspar A.Track-terrain Modeling and Traversability Prediction for Tracked Vehicles on Soft Terrain[J].Journal of Terramechanics,2010,47(4):151-160.
[10]Baladi G Y,Rohani B.A Terrain-vehicle Model for Analysis of Steerbility of Tracked Vehicles[J].Journal of Terramechanics,2011,40(8):65-70.
[11]曹付义,周志立,徐立友.履带车辆液压机械差速转向系统参数优化[J].农业工程学报,2013,29(18):60-66.