空时频检测前聚焦雷达信号处理方法
2014-10-03彭应宁夏香根毛二可
许 稼 彭应宁 夏香根 龙 腾 毛二可
①(北京理工大学信息与电子学院 北京 100081)
②(清华大学电子工程系 北京 100084)
③(美国特拉华大学电子与计算机工程系 纽瓦克 DE 1976)
1 引言
自上世纪40年代雷达诞生之日起,雷达信号处理就与之相伴走过了一段不断演进的发展历程[1-21]。与早期简单的波形产生、滤波和显示功能不同,信号处理系统功能日趋复杂多样,并与发射、天馈、接收、伺服和监控等分系统相互融合,逐步成为现代雷达核心分系统[3,4]。同时,雷达信号处理在理论和技术方面作为一门独立的学科也日臻成熟和完善。1943年,North[4]提出了匹配滤波理论,指明了噪声背景中确定波形检测的基本框架。1950年,Woodward[5]将信息论推广于雷达信号处理,提出适用于雷达最优检测的恒虚警(CFAR)准则。上述两项标志性工作奠定了一直沿用至今的经典雷达检测理论。1953年,Woodward[6]进一步提出了模糊函数描述发射波形的距离和多普勒分辨特性,为雷达波形设计和选择奠定了理论基础。据此,现代雷达大都采用具有大时宽带宽特性的“复杂波形”脉冲压缩处理,成功克服了简单波形在测距范围和测距精度间内在矛盾。复杂波形脉冲压缩技术在雷达领域的成功应用标志着雷达信号处理自立为一门独立学科的开始[7]。
在脉冲压缩技术基础上,现代雷达信号处理在诸多方面取得了长足发展。首先,随着天线设计和T/R 组件技术快速发展,相控阵天线[8-11]逐步代替了传统机械扫描反射面天线。通过阵元级信号处理,雷达空域信号处理可运用自适应数字波束形成(ADBF)在收发端空间能量聚集的同时有效抑制有源干扰。此外,雷达空域信号处理还可通过波达方向估计(DOA)高精度地测定目标和干扰来波方向。第二,针对雷达探测的杂波环境,现代雷达在早期动目标显示(MTI)技术[1-3]基础上逐步发展了动目标检测(MTD)和脉冲多普勒(PD)等技术实现杂波背景的有效抑制。同时,针对运动平台雷达空、时、频严重扩展的地物杂波抑制难题,近年来联合利用空域阵元采样和时域脉冲采样的空时自适应处理(STAP)[12]得到了普遍关注和深入研究。第三,基于针对均匀背景的单元平均(CA),有序统计量(OS)和非参量等CFAR处理方法[1-3,13],近年来针对高分辨率“长拖尾”复杂杂波背景和“分布式”目标的CFAR处理理论和方法研究取得了许多重要成果[13,14]。第四,随着雷达信号带宽和目标照射时间逐步增加,目标空间分辨率显著提高。现代合成孔径雷达/逆合成孔径雷达(SAR/ISAR)通过有效的运动补偿已可实现运动平台对运动目标的高分辨率成像。同时,高分辨率雷达图像也显著促进了雷达目标识别、雷达遥感等领域的迅猛发展[15-19]。
围绕上述领域的迅猛发展,常规雷达逐步形成如图 1所示的信号处理流程[1-21]。首先,雷达波束形成通过空域阵元间的相参积累实现能量的空间聚集和指向,而时域的脉冲压缩和MTD处理分别实现回波能量在脉内和脉间的相参积累。上述级联处理还可引入学习机制自适应地抑制干扰、杂波和噪声等成分对目标检测的影响。进而,雷达通过CFAR处理实现目标点迹的自动提取。显然,上述级联式信号处理流程同时也隐含了雷达高性能目标处理的前提:在回波处理和能量积累时,目标回波分布应尽可能局限于一个解耦的波束-距离-多普勒的 3维单元中。否则,目标将在空时频空间形成“分布式”目标,降低能量积累水平和检测性能。随着实践的深入,人们也逐步意识到了上述框架的应用限制,在级联式处理基础上引入了Hough变换(HT)[22-30]、动态规划(DP)[31-38]和 Bayes递推[39,40]等方法在跨距离单元(ARU)和跨多普勒单元(ADU)条件下实现回波能量的非相参积累。上述方法在确认目标点迹的同时,也给出了积累期间目标航迹的跟踪信息。因此,人们将基于HT和DP等实现检测和跟踪一体化的处理方法[22-42]通称为检测前跟踪(TBD)。同时,在目标检测基础上,高分辨率雷达可通过运动补偿获取高分辨率图像[15-19],为后续目标识别提供输入。上述基于TBD的级联式信号处理流程已较好地满足常规雷达对常规目标探测的需求,得到了广泛应用。
2 现代雷达信号处理的挑战与权衡

图1 现有雷达信号处理流程Fig.1 Conventional radar signal processing flowchart
然而,现代雷达目标环境和探测环境发生了显著变化[43-46],常规雷达体制和信号处理手段面临日益严峻的挑战。除了中低空飞机和海面中大型船只等常规目标以外,现代雷达探测目标包括了隐身舰船、超低空无人机、超高速飞机、高空高速巡航导弹、临近空间空天飞行器、弹道导弹和诱饵、太空碎片和卫星等高威胁度目标。同时,现代雷达目标特性也发生了显著变化,时空分布更加广阔密集,突防手段更加灵活多变。具体而言,这些挑战可归结为如下一些方面:
(1) 超高速
空天飞行器和弹道导弹等目标飞行速度达 5~25 M,可在瞬间穿越雷达空间波束和探测单元。因此,基于波束-距离-多普勒解耦的常规处理方法由于可积累脉冲数有限而常常难以奏效。同时,由于雷达和目标之间存在相对高速运动,传统雷达回波忽略的“尺度伸缩”效应[43,44]对于高速目标的空时相参积累均需要考虑,否则将有明显的SNR损失。
(2) 低RCS
当前,以B-2,F-22,AGM-129和阿利伯克驱逐舰等为代表的隐身飞机、导弹和舰船[45,46]不断涌现,对雷达远程探测提出了严峻挑战。通常,隐身目标的雷达反射截面积(RCS)较非隐身目标可大致下降两个数量级,相应的雷达威力下降为常规目标30%左右,严重影响了雷达有效探测。
(3) 高机动
与常规空中飞机和空间轨道目标不同,临近空间飞行器等高空高速目标的机动过载可达到2~4 g,并可通过螺旋、正弦、跳跃、大拐角等诸多不规则方式实现飞行航迹机动规避和变轨。雷达目标高机动特性导致回波多普勒特性的显著改变对常规信号流程及后续目标跟踪提出了严峻挑战。
(4) 超远程
现代雷达目标[43,44]可在距地高度为数百公里外层空间和数十公里临近空间之间高速自由穿梭,可在极远距离发起快速攻击。因此,为保证足够的预警时间,需要雷达对数千公里,甚至更远距离之外的目标实现超远程探测。
(5) 强杂波
强杂波始终是影响目标探测性能的主要因素[1-3,12],现代雷达主要面临如下3方面杂波环境的挑战:一是机载、球载和星载等升空雷达运动平台大量涌现,其下视探测低空和海面目标时必然受到扩展的强地物杂波的干扰。二是高空高速临近空间目标的主要活动区域处于大气电离层中,电离层杂波构成了此类目标探测的屏障。三是在高海情杂波背景中海面微弱目标探测始终是海用雷达目标探测的难题。
(6) 复杂电磁环境
目前,全频域、大功率、智能化电子干扰机可在时间、空间、频段、极化等各个维度严重干扰和压制雷达的探测性能。面对日益复杂目标环境,在纷繁复杂电磁环境中及时准确地发现、确定和识别“重点目标”是瞬息万变复杂电磁环境对现代雷达提出的严峻挑战。
权衡之一:相参积累还是非相参积累?虽然造成雷达目标探测困难的原因形形色色,但从信号处理观点来看,雷达目标与探测环境的恶化可归结为“如何在极低 SNR(此处 N代表系统抑制剩余的噪声,干扰和杂波等背景因素的综合)条件下实现微弱目标的有效探测”问题。因此,提高目标回波空时采样数目和积累水平是提高雷达系统性能的关键。通常,根据是否补偿目标在采样间的相位起伏,信号积累可分为相参积累与非相参积累两大类[47-50,64]。非相参积累将含噪声污染的采样求模积累,不补偿起伏相位,对系统和目标的相参性要求低,应用相对广泛。但是,由于未补偿起伏的相位,非相参积累SNR增益通常不如相参积累。更严重的是,非相参积累方法存在“SNR阈值”现象[49,50]。简言之,当目标初始SNR过低时,非相参积累增益接近为零,严重限制了非相参积累方法在低SNR场合的应用。而相参积累通过补偿采样间相位起伏,通过雷达采样样本的同相叠加实现 SNR增益线性增加。显然,除非采样间存在不可补偿的幅相起伏,先进的雷达信号处理系统应尽可能运用相参积累满足高性能积累的需求。
权衡之二:短时间积累还是长时间积累?从脉冲积累雷达方程[1-3,21]可见:在给定系统参数前提下,雷达威力线性或非线性地正比于雷达积累时间的4次方根。因此,增加雷达目标照射时间可改善雷达目标的探测性能,新体制雷达和常规雷达均可通过有效手段增加雷达目标观测时间。例如,对于稀布阵综合孔径雷达(SIAR)[60]等新体制数字阵列雷达(DAR)[11],可通过俯仰和方位多波束覆盖探测区域增加重点目标探测时间。此时,由于波束固定,除非目标自身运动超越雷达波束,目标将始终被雷达波束照射。同时,即使目标穿越其中一个波束,也可被相邻波束探测。对于常规雷达,亦可通过波束缓转和驻留等简单途径提高雷达目标照射时间。虽然此时雷达目标数据率和覆盖方位范围有所下降,但对重点方向和重点目标探测而言,上述波束控制是一种合适的选择。总之,长时间积累为基本不改变雷达系统参数而改善雷达性能提供了重要前提。
权衡之三:级联处理还是联合处理?虽然长时间积累可有效提高雷达性能,但长时间照射也极易造成运动目标回波积累处理的诸多困难。例如,长时间照射时运动目标极易产生跨距离单元(ARU)、跨多普勒单元(ADU)及跨波束单元(ABU)等“三跨”现象。常规信号处理(如图 1所示)采用基于波束形成、脉冲压缩和动目标检测(MTD)级联处理,在顺序积累时隐含了目标能量应独立分布于空、时、频解耦的单元上,从而也限制了可相参积累时间。虽然,现有方法提出了基于TBD的非相参积累以提高跨距离和多普勒单元时检测性能,但受“SNR阈值”[49,50]限制,其性能增益有限。究其原因,上述问题根源与常规信号处理采用时域和频域级联式局域处理密切相关。多维联合处理有可能对上述问题解决提供新思路。例如,在长时间积累运动目标 2维回波的距离频域,回波将始终出现在固定频率单元范围上,多普勒效应只反映在相位调制上。另外,在现有的SAR/ISAR的信号处理中,我们通常是将存在明显ARU和ADU的回波信号联合处理获取目标高分辨率的图像,这也启发我们多维的联合处理可有效提高目标回波能量的积累水平。总之,空时频多维度目标回波及其在变换域的联合处理可有效避免信号的跨越效应,为提供雷达信号处理性能和水平提供坚实的基础。
3 雷达检测前聚焦理论与方法
基于上述3方面的权衡,可见基于多维联合处理实现长时间相参积累[47-63]是改进现代雷达信号处理性能的重要发展方向。基于上述研究思路,2011年,文献[64-71]提出了 Radon-Fourier变换(RFT)和广义 Radon-Fourier变换(GRFT)等雷达信号处理新方法。针对“三跨”目标回波,新方法将目标长时间相参积累问题转换为一个参数化的模型匹配问题。例如,对于匀速径向运动目标,目标初始距离和径向速度决定了目标在相参积累期间的“三跨”特性,也决定了回波多普勒起伏。因此,雷达可通过 RFT联合补偿距离走动和多普勒起伏实现长时间的相参积累。实质上,RFT和 GRFT等方法都是实现运动目标在长时间发生“三跨”情形下实现有效的相参积累。同时,RFT和 GRFT的相参积累结果也在变换对应的参数空间中形成了目标的“多维聚焦图像”。为与现有检测前跟踪(TBD)技术比较,我们将课题组提出的参数化的长时间相参积累方法统一命名为“检测前聚焦(FBD)[69]”技术。同年,相关概念在CIE国际雷达年会提出并获得了国内外专家和学者的认同。
具体而言,若雷达探测目标为一个波束内的线性运动目标,则有 R(t)=r0+vt,其中,r0为目标在t=0时的斜距,v是目标的径向运动速度。因此,如果目标的初始距离和速度已知,则可以直接补偿长相参积累中的包络和相位变化。但在目标探测前,这些参数是未知的。因此,可以建立一个覆盖可能r0和v的参数空间,将回波脉冲投影到这个空间,形成一个“聚焦”的峰。
定义 1 当线性距离徙动满足直线方程rs=r+vt时,标准RFT[64]为:

其中,式(1)定义为标准RFT是因为其参数r和v具有明确的含义。实际上,匀速运动目标的距离徙动也可采用极距ρ和极角θ等不同参数对进行描述,而不同参数对间等价关系在文献[64]中已讨论。在更一般的情况下,假设相参积累时间目标距离徙动函数由N个运动和位置待定参数确定。此时,我们定义广义Radon-Fourier变换(GRFT)为:
2.2 工作曲线和检出限 分别移取一定量的多元素混合标准储备液,以5%硝酸稀释,配制浓度梯度分别为0.5、1、10、20、50、100 mg/L的K、Ca和Mg的多元素混合标准工作溶液。在线加入内标溶液,然后用ICP-MS测定,测得K、Ca和Mg元素的线性回归方程和相关系数,详细结果见表2。同时,取最低浓度的标准溶液进行分析,重复测定10次,以测定结果的3倍标准偏差计算方法的检出限,结果见表2。
定义 2 设 f(t,rs)∈C为定义在(t,rs)平面上距离脉冲压缩后 2-D复函数,t 和rs分别为脉冲观测时间和斜距。该平面内目标距离徙动曲线为N+1维等式 rs=η(α1,α2,…,αN,t),则GRFT定义为:

本文定义的RFT是GRFT的一个最简单的特例,而GRFT是适于更为复杂运动的目标相参积累方法。若将目标的空间位置(如方位和俯仰)和信号随频率成分也作为待定参数,则GRFT可同时实现空时频多域联合相参积累。
因此,基于创新的FBD处理,我们进一步展望新一代雷达信号处理应采用如图2所示的联合处理结构。当新体制雷达获取多脉冲、多阵元和多频段的空时信号后,通过空时频的FBD处理(STF-FBD)完成信号的多维联合相参积累,获得理想的SNR增益。换言之,STF-FBD可将常规雷达信号处理的宽带波束形成、脉冲压缩和多普勒滤波等多个级联的相参处理环节整合,并克服“三跨”效应的影响。同时,对于特别微弱目标在更长时间、更大空间和更宽频段范围中,通过对STF-FBD输出运用TBD技术,形成STF-FBD-TBD相参/非相参的混合积累方式进一步提高性能。与常规混合积累[62,63]不同,STF-FBD-TBD已通过STF-FBD极大增加了目标的SNR,因此可显著降低TBD的“SNR阈值”[49,50]。第三,STF-FBD处理完成了对目标空间和运动参数的匹配估计,可实现目标参数的高精度测量。第四,目标经过 STF-FBD处理在多维空间实现了相参投影,也实现了目标与杂波和干扰等背景因素的有效分割和抑制。例如,文献[64]指出RFT处理是一个广义的多普勒滤波器,因此RFT可显著抑制强杂波对运动目标检测的影响。第五,通过 STF-FBD处理,新体制雷达也获取了目标在多维参数空间的聚焦图像[67]。切取多维图像的空间分布切片可获得反映目标散射结构的常规雷达图像。同时,新方法还可切取目标速度、加速度等维度的运动参数图像,这是常规成像雷达难以提供的。第六,基于 STFFBD获取目标空间参数结构图像和运动参数图像构成了目标的重要特征,可为后续目标有效识别奠定基础。总之,本文空时频检测前聚焦雷达信号处理理论和方法可为复杂探测和目标环境中显著提高雷达威力和探测性能奠定理论和技术基础。
4 国内外相关领域研究现状、进展与比较
本文提出的 FBD技术源于雷达长时间积累技术,是新体制雷达高性能信号处理的关键技术与核心环节。本文中“长时间”特指雷达对特定探测目标存在明显ARU,ADU或ABU等效应时对应的照射和积累时间。下面,分别介绍长时间非相参积累、长时间相参积累和空时频检测前聚焦3个相关领域的研究现状。
4.1 基于长时间非相参积累的TBD技术
在雷达长时间非相参积累方面,Allen等人[20,21]开展了初创性工作,指出对目标跨距离单元脉冲积累在空变的杂波环境下可比传统积累获得更优性能[20],并基于最大化检测概率研究了多目标积累路径集合优化配置问题。雷达非相参积累可直接对脉冲回波进行能量累加,也可基于初步的相参处理结果实现 CPI间非相参积累[22-40,62,63]。基于长时间非相参积累的检测前跟踪(TBD)[22-40]是一类微弱目标积累检测策略,主要对初级处理数据进行跨距离单元和跨多普勒单元的跟踪,利用跟踪信息最终判断目标是否存在并给出其运动轨迹。现有基于该策略的非相参积累方法主要包括 Hough变换类[22-30]方法、动态规划(DP)类[31-38]方法及基于Bayes递推的TBD[39,40]方法。

图2 基于FBD的信号处理流程图Fig.2 Proposed FBD-based radar signal processing flowchart
文献[23-30]在搜索雷达中采用了图像处理的Hough变换方法进行目标的检测与跟踪,将雷达数据的“距离-时间”视图变换到直线参数平面,实现ARU条件下积累,该方法在不同体制雷达积累检测中得到了应用。在该类方法性能方面,文献[26]分别讨论了存在随机脉冲干扰情况下及不同类型杂波下的积累检测性能。此外,极坐标Hough变换(PHT)实现方法[27]更适用于目标速度变化情况,平移参数空间的改进Hough变换方法[28]与并行化Hough变换算法[29]可降低算法实现复杂度,扩展至“距离-方位-时间”的3D-Hough方法[30]可利用更丰富目标运动特征进行能量积累。通常,Hough变换类方法对直线或近于直线运动目标积累效果较好,但也存在离散化处理的模式失配和SNR阈值等问题。动态规划类方法早期应用于图像及红外目标检测[31-33],后为雷达微弱目标积累检测方法所借鉴[34-38]。针对雷达目标的动态规划类积累算法一般将多个CPI处理的结果作为各个状态,将目标的运动视为状态序列的转移,利用动态规划实现目标轨迹搜索[34]。文献[35]讨论了动态规划算法机理,并结合初级门限与CFAR技术提出了改进算法。动态规划类方法对具有一定机动性的运动目标可进行较好地积累。但是,实际雷达系统工作时,目标个数是无法预先确定的。文献[36,37]讨论了未知目标个数时的检测前跟踪问题。文献[38]指出,当搜索目标数目增大到一定程度时,积累检测性能将下降,出现低 SNR失效问题。基于贝叶斯递推TBD方法将初级处理后数据作为观测变量,通过递推式滤波器估计Bayes后验概率,作为目标是否存在的判决依据。另外,粒子滤波器[39,40]可有效提高该滤过程在非线性跟踪情况的性能。
综上所述,基于长时间非相参积累的TBD方法对目标初始SNR有基本阈值要求。对于微弱目标探测而言,即使采用图1级联处理作为后继TBD的输入,但“三跨”效应必然会影响解耦处理相参积累时间和TBD输入初始SNR。总之,基于长时间非相参积累TBD方法性能有限,不适合极低SNR微弱目标的探测。
4.2 长时间相参积累和检测前聚焦技术
针对跨距离单元下长时间相参积累,现有方法主要分为两类:第一类方法是对脉冲压缩后“距离-脉冲”域原始回波通过包络平移或扩展实现跨距离单元补偿。采用“距离拉伸”与时频变换结合的方法[55]实现回波跨距离单元与时变多普勒单元的补偿,但将部分不包含目标的距离单元也进行了累加,会造成SNR损失和距离分辨率降低。利用包络补偿与FFT滤波器组结合的方法[56,57]较好地实现了匀速运动目标跨距离单元补偿,但未能充分利用目标速度与多普勒频率对应关系。文献[58]提出的利用Hough变换结合脉冲间相位补偿的方法,能够进一步提高常规Hough变换对匀速运动目标的积累检测性能。“距离-脉冲”域补偿方法直接在距离维度上实现包络平移补偿,物理意义明确。但是,为保证补偿精度,需采用距离维插值来提高补偿精度,运算量较大。
另一类跨距离单元补偿方法是在“距离-脉冲”维信号的相应变换域进行ARU单元补偿。文献[59]提出,在回波进行2-D FFT处理后的“距离频率-多普勒频率”平面,沿距离徙动直线对每个可能速度进行相应匹配积累。该方法可利用多普勒频率与目标速度的对应关系降低复杂度。文献[60]的方法对脉冲压缩后信号的分段 FFT结果也利用了多普勒频率与速度的对应关系实现包络移位补偿。在“快时间频率-脉冲”域,通过脉冲维的 Keystone变换进行尺度伸缩,可以对一定速度范围内的匀速目标实现跨距离单元的统一补偿[51-53,61]。文献[61]基于搜索策略进一步提出了 Keystone方法的模糊数补偿方法。变换域补偿方法不需要提高距离维精度,但通常需要对多普勒模糊数进行专门补偿,难以实现对不同模糊数目标的同时相参积累。
基于长时间积累深入研究,我们针对目标距离、时延和多普勒之间的耦合关系,提出了基于RFT和GRFT相参积累新方法,构成了检测前聚焦(FBD)[64-69]新概念的基础。为进一步阐明 FBD 含义,我们给出典型雷达参数下几类典型长时间积累方法[69]的效果如图3和图4所示。图3给出了不同方法的响应图,图4给出了实际噪声背景下的积累效果。可见,由于跨距离单元的影响,现有 MTD运动目标检测结果完全被噪声淹没。基于Hough变换非相参积累方法,由于积累增益有限,检测效果也不理想。基于Keystone方法相参积累对于非盲速目标检测效果良好,但丢失了有盲速的高速目标。RFT方法则可实现对3个目标的高性能检测。
进而,基于仿真雷达参数[64],我们给出不同方法对于1 M的高速目标在1 s内的积累检测威力。可见,RFT方法通过长时间积累的聚焦处理,相对MTD等传统方法有近3倍的威力增程。

表1 高速目标理论最大探测距离(1 M)Tab.1 The theoretical maximumcoverage for high-speed target (1 M)
综上所述,显然FBD处理对于高速目标检测性能提高具有重要作用,能够对远程微弱目标获得良好的检测性能。
4.3 空时频检测前聚焦技术
基于长时间积累方面提出的 FBD处理创新概念,我们指出基于长时间积累FBD技术还可推广到空域和频域积累处理中,进一步提高空域和频域的相参积累增益。例如,对于数字阵列相控阵雷达而言,为获取大天线增益,需要增加天线尺寸。同时,为了提高雷达距离分辨率,需不断增加信号带宽。此时,宽带信号在天线阵元之间,不仅需要补偿相位,还需补偿阵元间波形的位移。否则,由于阵元间信号时延差大于“孔径渡越”时间,天线波束的指向效果和天线增益明显下降。为此,我们将FBD方法在空时2维平面进行了推广,提出了空时2维RFT(ST-RFT)新方法[71],实现了在“孔径渡越”和“跨距离单元”条件下空时2维联合相参积累,即空时2维FBD处理。通过在距离-速度-方位角联合处理,实现目标能量在多维空间中的能量“聚焦”。空时2维FBD处理的仿真结果如图5所示。
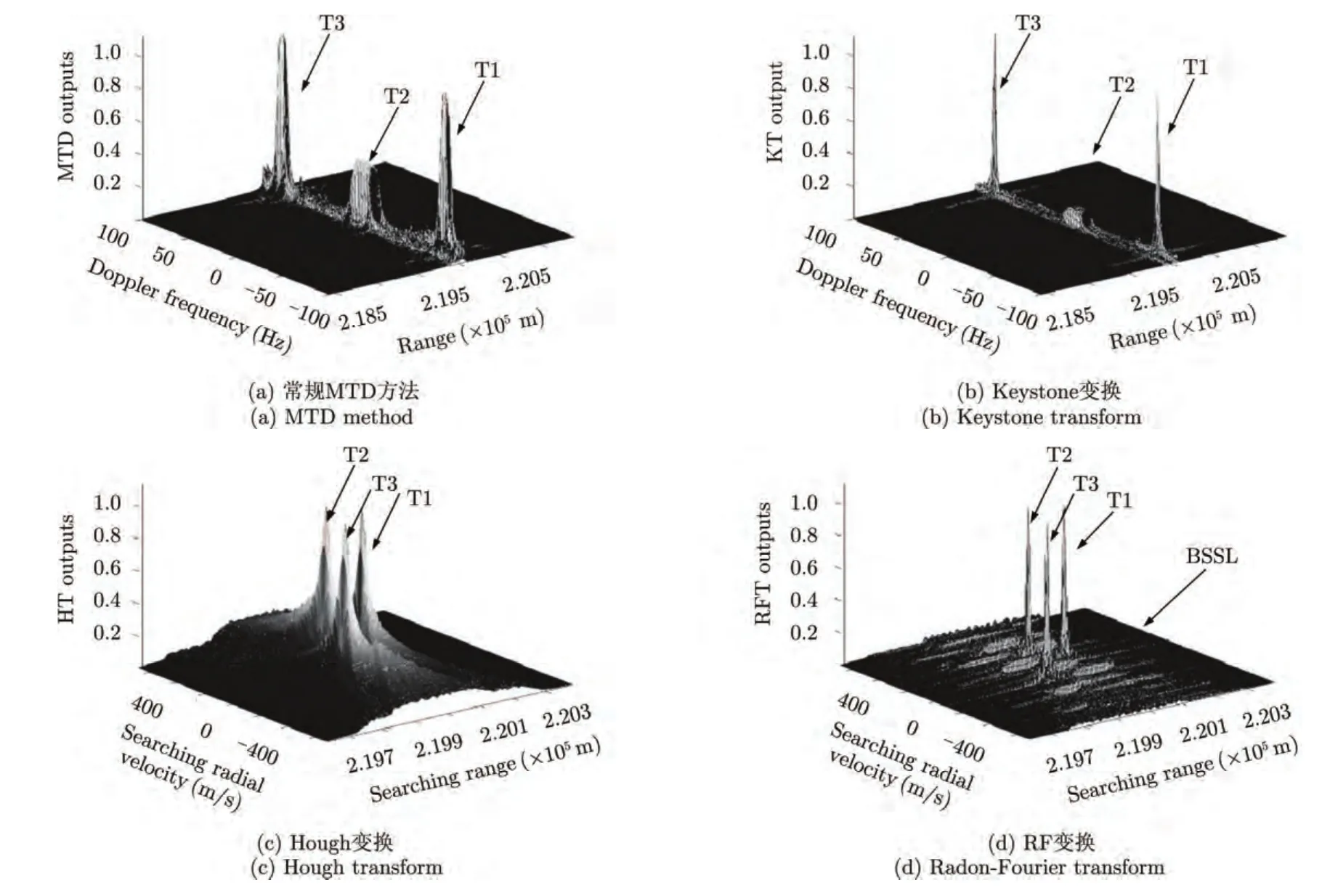
图3 不同方法的2维响应(无噪声)Fig.3 Two-dimensional response of different methods (without noise)

图4 不同方法的积累效果比较(220 km)Fig.4 Two-dimensional response of different methods (with noise)
例如,提高信号带宽和距离分辨率始终是雷达探测的重要追求。以美国空间目标测量雷达为例,有代表性宽带雷达包括:ALCOR,工作于C波段,采用Chirp波形,带宽为512 MHz,距离分辨能力为53 cm。MMW雷达,工作于Ka波段和W波段,发射带宽 2 GHz,距离分辨率为 14 cm。此外,COBRA-JUDY双波段雷达,有S波段相控阵天线和X波段圆盘天线,各有1 GHz信号带宽。虽然,上述雷达已可提供很高带宽和距离分辨率,但受成本和物理设计限制,为获得更高带宽需要显著增加硬件成本。因此,直接建造一部更高带宽的 UWB雷达十分昂贵,而更有创意的做法是利用现有多部宽带雷达回波信号通过带宽合成形成更高分辨率雷达图像。为此,1997年,林肯实验室开发了一种BWE频域处理方法[72,73],通过预测COBRA-JUDY雷达观测带宽外频段目标响应达到增加有效带宽。文献[72]介绍的基于BWE仿真处理结果如图6所示,通过BWE可在子带稀疏和缺失情况下获取目标合成宽带的图像。由于BWE和RFT方法均采用了与目标运动或散射特征有关参数化方法,BWE方法是一种频域的参数化方法,可归结为频域FBD方法。

图5 ST-RFT的响应和输出(1000 km)[67]Fig.5 Response and output of the proposed ST-RFT
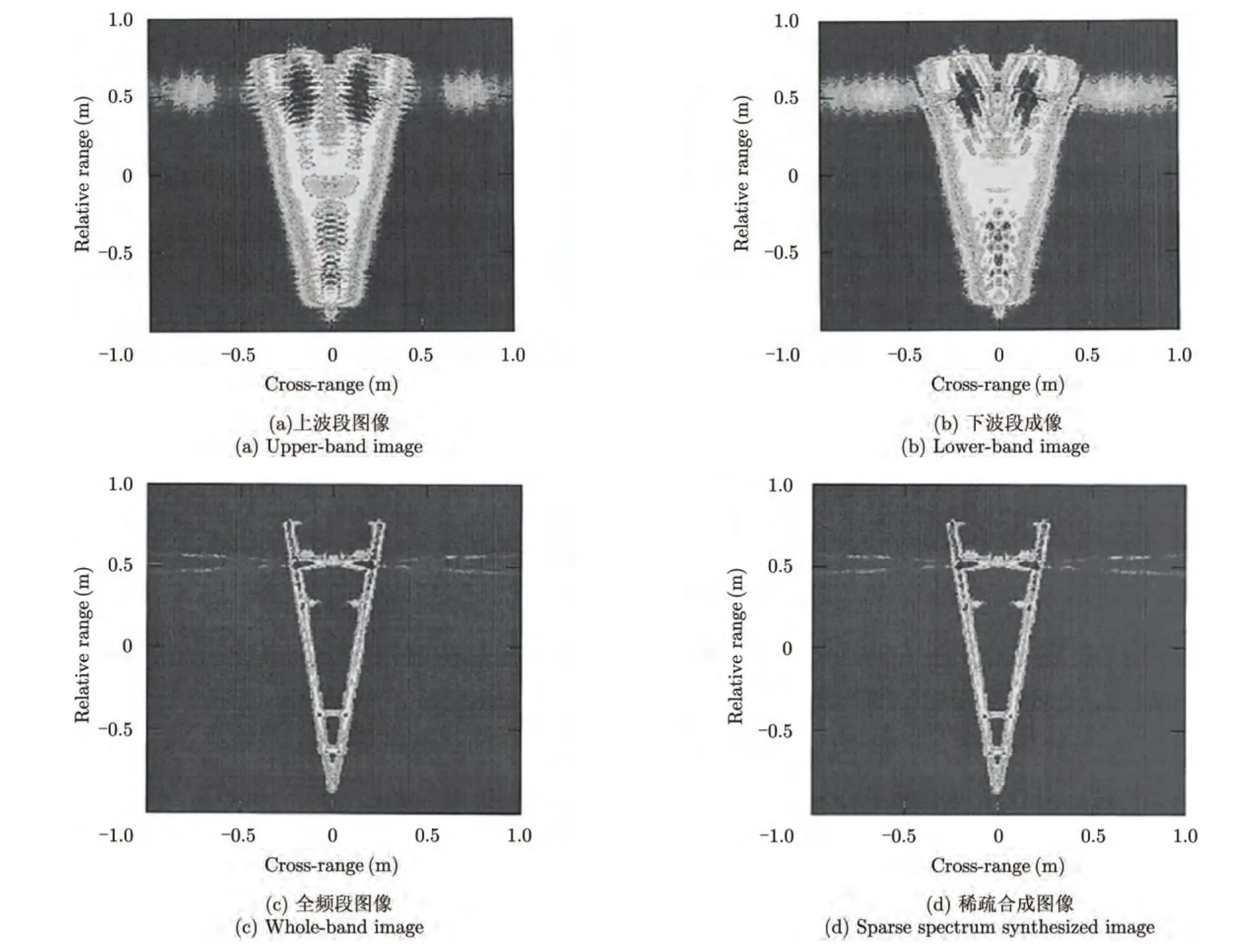
图6 频域检测前聚焦[72]Fig.6 Focus-Before-Detects in frequency domain[72]
5 总结与展望
基于上述相关领域现状的分析,本文提出的STF-FBD新理论和新方法可充分利用雷达空时频的探测资源,通过检测、估计、跟踪、成像及识别的一体化处理,显著提高新体制雷达对高速、高机动、超远程、隐身目标的探测性能。围绕STF-FBD理论和方法,未来应重点研究方向包括:
首先,以高速高机动隐身的空间目标为重点进行信号建模研究,深入分析其目标特性,定量研究目标幅度和相位调制与目标高阶运动间的相互关系。
其次,通过空、时、频及其变换域信号建模、确定雷达目标可相参积累极限时间、极限视角和极限频宽,围绕尺度伸缩、孔径渡越、稀疏子带、跨距离、跨多普勒、跨波束等条件下运动目标回波能量有效积累难题,进一步完善STF-FBD的理论和方法。
第三,进一步研究 STF-FBD的快速算法,为STF-FBD方法的工程应用和推广奠定基础。
第四,在大于极限时间、极限视角和极限频宽的空时频观测条件下,基于STF-FBD-TBD的混合积累框架进一步改善微弱目标的探测效果。
第五,充分研究杂波、干扰和目标在STF-FBD多维空间中的分布特性,进一步提出杂波和干扰抑制的新方法。
第六,在检测和参数估计前获取目标在空、时、频多维度的“聚焦”图像,显著改善雷达对隐身、高速和高机动目标的运动和位置参数测量精度,逼近参数测量的Cramer-Rao界。
第七,充分利用目标高机动特性,基于宽带雷达研究基于 STF-FBD实现目标多维联合成像的有效方法。
第八,针对雷达目标空时频FBD聚焦图像,研究基于目标空间分布结构和运动参数图像研究特征提取和目标识别新方法。
[1]Barton D K.Radar System Analysis and Modeling[M].Beijing: Publishing House of Electronics Industry,2004.
[2]Skolnik M I.Introduction to Radar System[M].New York:McGraw-Hill,2002.
[3]Skolnik M I.Radar Handbook[M].2nd Ed.,New York:McGraw Hill,1990.
[4]North D O.An analysis of the factors which determine signal/noise discrimination in pulsed carrier system[R].Princeton,NJ,RCA Labs,Rep PTR-6C,1950.
[5]Woodward P M.A theory of radar information[J].Physical Magazine,1950,41: 1001-1017.
[6]Woodward P M.Probability and Information Theory with Application to Radar[M].London: Pergamon Press,1953.
[7]Nathanson F E.Radar Design Principles[M].New York:McGraw-Hill,1969.
[8]Mailloux R J.Phased Array Antenna Handbook[M].Boston/London: Artech House,2005.
[9]Van Trees H L.Detection,Estimation and Modulation Theory Part IV—Optimum Array Processing[M].New Jersey:Wiley,2002.
[10]Cantrell B,Graaf D J,Willwerth F,et al..Development of a Digital Array Radar (DAR)[J].IEEE Aerospace and Electronic Systems Magazine,2002,17(3): 22-27.
[11]吴曼青.数字阵列雷达及其进展[J].中国电子科学研究院学报,2006,1(1): 11-16.Wu M Q.Digital antenna radar and its development[J].Journal of Chinese Electronic Research Institute,2006,1(1):11-16
[12]王永良,彭应宁.空时二维自适应处理[M].北京: 清华大学出版社,2000.Wang Y L and Peng Y N.Space-time Adaptive Processing[M].Beijing: Tsinghua University Publisher,2000.
[13]何友,关键,彭应宁,等.雷达自动检测与恒虚警处理[M].北京: 清华大学出版社,1999.He Y,Guan J,Peng Y N,et al..Radar Automatic Detection and Constant False Alarm Processing[M].Beijing: Tsinghua University Publisher,1999.
[14]Gerlach K and Steiner M J.Adaptive detection of range distributed targets[J].IEEE Transactions on Signal Processing,1999,47(7): 1844-1851.
[15]保铮,邢孟道,王彤.雷达成像技术[M].北京: 电子工业出版社,2005.Bao Z,Xing M D,and Wang T.Radar Imaging Technology[M].Beijing: Publishing House of Electronics Industry,2005.
[16]刘永坦.雷达成像技术[M].哈尔滨: 哈尔滨工业大学出版社,1999.Liu Y T.Radar Imaging Technology[M].Harbin: Harbin Industry University Publisher,1999.
[17]Cumming L G and Wong F H著,洪文,胡东辉,等(译),吴一戎(编).合成孔径雷达成像—算法与实现[M].北京: 电子工业出版社,2006.Cumming L G,Wong F H,Hong W,Hu D H,et al.(Translating) ,Wu Y R (Editing).Synthetic Aperture Radar Imaging—Algorithm and Realization[M].Beijing: Publishing House of Electronics Industry,2006.
[18]Oliver C and Quegan S.Understanding Synthetic Aperture Radar Images[M].Norwood,MA: 1998.
[19]Du L,Liu H W,Bao Z,et al..A two-distribution compounded statistical model for radar HRRP target recognition[J].IEEE Transactions on Signal Processing,2006,54(6): 2226-2238.
[20]Allen M R.Long term integration for radar detection of small targets in clutter[D].[Ph.D.dissertation],Philadelphia,PA:University of Pennsylvania,1988.
[21]Allen M R,Katz S L,and Urkowitz H.Geometric aspects of long-term noncoherent integration[J].IEEE Transactions on Aerospace and Electronic Systems,1989,25(5): 689-700.
[22]Reed I S,Gagliardi R M,and Stotts L B.A recursive moving-target-indication algorithm for optical image sequences[J].IEEE Transactions on Aerospace and Electronic Systems,1990,26(3): 434-440.
[23]Carlson B D,Evans E D,and Wilson S L.Search radar detection and track with the Hough transform,Part I: system concept[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1): 102-108.
[24]Carlson B D,Evans E D,and Wilson S L.Search radar detection and track with the Hough transform,Part II:detection statistics[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1): 109-115.
[25]Carlson B D,Evans E D,and Wilson S L.Search radar detection and track with the Hough transform,Part III:detection performance with binary integration[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1): 116-125.
[26]Doukovska L and Kabakchiev C.Performance of Hough detectors in presence of randomly arriving impulse interference[C].International Radar Symposium,2006:473-476.
[27]Garvanov I and Kabakchiev C.Radar detection and track determination with a transform analogous to the Hough transform[C].International Radar Symposium,2006: 121-124.
[28]Zeng J K and Yuan S Z.Improved Hough transform algorithm for radar detection[C].2nd International Conference on Power Electronics and Intelligent Transportation Systems,2009,2: 320-323.
[29]Satzoda R K,Suchitra S,and Srikanthan T.Parallelizing the Hough transform computation[J].IEEE Signal Processing Letters,2008,15: 297-300.
[30]Moqiseh A and Nayebi M M.3-D Hough transform for surveillance radar target detection[C].IEEE Radar Conference,RADAR’08,2008: 1-5.
[31]Barniv Y.Dynamic programming solution for detecting dim moving targets[J].IEEE Transactions on Aerospace and Electronic Systems,1985,21(1): 144-156.
[32]Barniv Y and Kella O.Dynamic programming solution for detecting dim moving targets,Part II: analysis[J].IEEE Transactions on Aerospace and Electronic Systems,1987,23(6): 776-788.
[33]Nichtern O and Rotman S R.Point target tracking in a whitened IR sequence of images using dynamic programming approach[C].Proceedings of SPIE,2006,6395: 1-10.
[34]Tonissen S M and Evans R J.Performance of dynamic programming techniques for track-before-detect[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4): 1440-1451.
[35]Mo L,Wu S L,and Mao E K.Radar detection for dim moving target using DP algorithm[J].Acta Electronica Sinica,2004,13(3): 486-490.
[36]Buzzi S,Lops M,Venturino L,et al..Detection of an unknown number of targets via track-before-detect procedures[C].IEEE Radar Conference,2007: 180-185.
[37]Huang Y,Jiang G F,Qiu,K L,et al..Radar track-before-detect algorithm of multitarget based on the dynamic programming[C].Proceedings of CIE International Conference on Radar,2006: 212-215.
[38]Johnston L A and Krishnamurthy V.Performance analysis of a dynamic programming track before detect algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(1): 242-248.
[39]Boers Y and Driessen H.Particle filter track-before-detect application using inequality constraints[J]. IEEE Transactions on Aerospace and Electronic Systems,2005,41(4): 1481-1487.
[40]Boers Y and Driessen J N.Multitarget particle filter track before detect application[J].IEE Proceedings Radar,Sonar and Navigation,2004,151(6): 351-357.
[41]Rutten,M G,Gordon N J,and Maskell S.Recursive track-before-detect with target amplitude fluctuations[J].IEE Proceedings Radar,Sonar and Navigation,2005,152(5):345-352.
[42]Davey S J,Rutten M G,and Cheung B.A comparison of detection performance for several Track-Before-Detect algorithms[C].11th International Conference on Information Fusion,2008: 493-500.
[43]杨建宇.雷达技术发展规律和宏观趋势分析[J].雷达学报,2012,1(1): 19-27.Yang J Y.Development laws and macro trends analysis of radar technology[J].Journal of Radars,2012,1(1): 19-27.
[44]Kelly E J and Wishner R P.Matched-Filter theory for high-velocity,accelerating targets[J].IEEE Transactions on Military Electronics,1965,9(1): 56-69.
[45]朱长征.飞机的隐身技术现状及发展趋势[J].航天电子对抗,2001,(6): 42-45.Zhu C Z.Status and developments of stealthy technologies of aircraft[J].Aerospace Electronic Warfare,2001,(6): 42-45.
[46]赵培聪.2010 年隐身与反隐身技术发展情况[J].现代雷达,2011,33(4): 8-12.Zhao P C.Development of stealth and anti-stealth technology of foreign country in 2010[J].Modern Radar,2011,33(4): 8-12.
[47]Richards M A.Coherent integration loss due to white Gaussian phase noise[J].IEEE Signal Processing Letters,2003,10(7): 208-210.
[48]Yu J,Xu J,and Peng Y N.Upper bound of coherent integration loss for symmetrically distributed phase noise[J].IEEE Signal Processing Letters,2008,15: 661-664.
[49]Tandra R and Sahai A.SNR walls for signal detection[J].IEEE Journal of Selected Topics of Signal Processing,2008,2(1): 4-17.
[50]Tranda R.Fundamental limits on detection in low SNR[D].[Master dissertation],University of California,Berkeley,2005.
[51]DiPietro R C,Fante R L,and Perry R P.SAR imaging of moving targets[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(1): 188-200.
[52]Zhang S S,Zeng T,Long T,et al..Dim target detection based on Keystone transformation[C].IEEE International Radar Conference,2005: 889-894.
[53]Perry R P,DiPietro R C,and Fante R L.Coherent integration with range migration using Keystone formatting[C].IEEE Radar Conference,2007: 863-868.
[54]夏卓卿,陆军,陈伟建.凝视动目标相参积累技术研究[J].中国电子科学研究院学报,2009,4(5): 498-502.Xia Z Q,Lu J,and Chen W J.The research of long-time coherent integration for moving target[J].Journal of Chinese Electronic Research Institute,2009,4(5): 498-502.
[55]王俊.微弱目标信号积累检测的方法研究[D].[博士论文],西安电子科技大学,1999.Wang J.Researches on the detection of weak targets by signal integration[D].[Ph.D.dissertation],Xidian University,1999.
[56]陈远征,朱永锋,赵宏钟,等.基于包络插值移位补偿的高速运动目标的积累检测算法研究[J].信号处理,2004,20(4):387-390.Chen Y Z,Zhu Y F,Zhao H Z,et al..Detection algorithm research of high velocity moving target based on the Envelop interpolation[J].Signal Processing,2004,20(4):387-390.
[57]Deng F S and Wang X G.Coherent integration detection algorithm research of space debris[C].Proceedings of CIE International Conference on Radar,2006: 232-235.
[58]Zeng J K,He Z H,Sellathurai M,et al..Modified Hough transform for searching radar detection[J].IEEE Geoscience and Remote Sensing Letters,2008,5(4): 683-686.
[59]Marzetta T L,Martinsen E A,and Plum C P.Fast pulse Doppler radar processing accounting for range bin migration[C].Proceedings of IEEE National Radar Conference,1993: 264-268.
[60]Chen B X,Liu H L,and Zhang S H.Long-time coherent integration based on sparse-array synthetic impulse and aperture radar[C].Proceedings of CIE International Conference on Radar Proceedings,2001: 1062-1066.
[61]Yang L,Zeng T,Long T,et al..Range migration compensation and Doppler ambiguity resolution by Keystone transform[C].Proceedings of CIE International Conference on Radar,2006: 1466-1469.
[62]左渝,许稼,彭应宁,等.SAR运动目标距离多普勒域扩展混合积累检测[J].清华大学学报(自然科学版),2010,50(1):145-148.Zuo Y,Xu J,Peng Y N,et al..Extended hybrid integration for SAR movingtarget detection in range-Doppler domains[J].Journal of Tsinghua University (Science and Technology),2010,50(1): 145-148.
[63]李刚,许稼,彭应宁,等.基于混合积累的SAR微弱运动目标检测[J].电子学报,2007,35(3): 576-579.Li G,Xu J,Peng Y N,et al..SAR weak moving target detection based on hybrid integration[J].Acta Electronica Sinica,2007,35(3): 576-579.
[64]Xu J,Yu J,Peng Y N,et al..Radon-Fourier Transform (RFT)for radar target detection (I): generalized Doppler filterbank[J].IEEE Transactions on Aerospace and Electronic System,2011,47(2): 1186-1202.
[65]Xu J,Yu J,Peng Y N,et al..Radon-Fourier Transform (RFT)for radar target detection (II): performance analysis and sidelobe suppression[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(4): 2473-2489.
[66]Yu J,Xu J,Peng Y N,et al..Radon-Fourier Transform (RFT)for radar target detection (III): optimality and fast implementations[J].IEEE Transactions on Aerospace and Electronic System,2012,48(2): 991-1004.
[67]Xu J,Yu J,Peng Y N,et al..Space-time radon-fourier transform and applications in radar target detection[J].IET Radar,Sonar & Navigation,2011,6(9): 846-857.
[68]Xu J,Dai X Z,Xia X G,et al..Configurations of multisite radar system with MIMO radars for target detection optimization[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(4): 2329-2343.
[69]Xu J,Yu J,Peng Y N,et al..Focus-before-detects for radar target detection[C].Proceedings of CIE International Radar Conference,2011: 430-433 (Excellent paper awards).
[70]Xu J,Xia X G,Peng S B,et al..Radar maneuvering target motion estimation based on generalized Radon-Fourier transform[J].IEEE Transactions on Signal Processing,2012,60(12): 6190-6201.
[71]Qian L C,Xu J,Xia X G,et al..Wideband scaled radon fourier transform for high-speed radar target detection[J].IET Radar,Sonar & Navigation,DOI:10.1049/iet-rsn.2012.364.
[72]Cuomo K M,Piou J E,and Mayhan J T.Ultra-wideband coherent processing[J].Lincoln Laboratory Journal,1997,10(2): 203-222.
[73]Cuomo K M,Piou J E,and Mayhan J T.Ultra-wideband sensor fusion for BMD discrimination[C].IEEE 2000 International Radar Conference,USA,2000: 7-12.