无负载侧谐波检测的有源滤波器自适应预测算法
2014-09-27张宸宇郑建勇郭邵卿周福举
张宸宇,梅 军,郑建勇,郭邵卿,周福举
(东南大学 电气工程学院,江苏 南京 210096)
0 引言
作为谐波治理的有效手段,有源电力滤波器(APF)自从20世纪70年代被提出以后,得到了迅速的发展。并联APF的最终目的就是通过电压源逆变器(VSI)去逆变补偿负载侧的谐波电流,检测谐波电流成为经典APF控制策略的重要组成部分。国内外学者对APF的绝大多数研究都集中在负载谐波以及无功功率检测上,如ip-iq法、FBD、自适应、神经网络检测、小波检测等各种检测手段一直是APF研究的热点[1-3]。
然而,APF作为一种电力电子装置,并不是单一的电流闭环跟随系统。在实际APF应用中,需要跟踪补偿电流和控制直流侧电压,桥臂输出电流不仅取决于检测谐波信号,还受到直流侧电压的影响,所以APF实际是一种桥臂电流环为内环、直流侧电压环为外环的典型双闭环控制系统[4]。
文献[5-6]分别从控制系统和数学模型的角度证明了谐波检测只是APF双环控制系统的一个前馈补偿信号,当然对于不同类型的负载,前馈电流成分也各不相同。在经典APF控制算法中,如ip-iq算法,负载基波电流前馈控制的作用在算法中所占比例要远大于直流侧电容电压反馈控制。文献[7]通过数学建模证明了负载基波电流前馈控制可以起到一定的负载电流预测功能,但不能提高APF在稳态时的补偿精度。文献[8]则论证了谐波、无功检测在APF中并不是必需的。
无负载侧谐波检测的控制方法,因为具有不需检测、计算负载谐波分量就可以达到同样补偿效果等优点,引起了人们的广泛关注,其最具代表性的方法就是直流侧电压控制和单周控制[9]。由于失去了负载基波电流前馈控制的预测作用,无负载侧谐波检测控制方法在补偿动态负载时会出现跟踪松弛,势必会影响最终的动态补偿性能。
所以,本文提出一种无负载侧谐波检测的自适应滤波器预测算法。该方法完全通过软件实现,且不需要检测负载和APF桥臂输出电流,采用一种基于最小均方(LMS)准则的变步长自适应滤波器对网侧基波电流进行预测。相比传统的预测算法,该方法滤波器系数迭代滚动优化,收敛因子μ在线实时调整,既保证了预测算法稳定性,也提高了动态时的收敛速度。改进后的方法不但省去了负载侧和桥臂侧的电流传感器,而且具有良好的稳态补偿特性和动态跟踪性能。仿真及实验均证明了本文所提出方法的有效性和可行性。
1 APF补偿等效原理
图1是典型的传统APF控制方案。
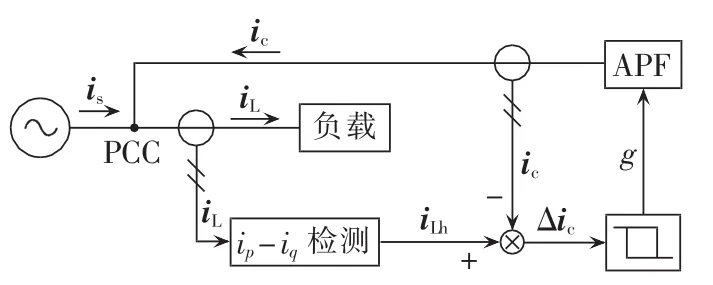
图1 传统APF控制方案Fig.1 Traditional strategy of APF control
在公共耦合点(PCC)进行KCL分析有:

对负载电流iL进行ip-iq检测可以分解出基波分量和谐波分量:

对于APF的补偿目标:

结合式(1)—(3)可得网侧电流:

然而实际上桥臂输出电流会和指令电流有一个电流开关误差,设:

这样就使得网侧实际电流和指令电流之间也有误差:

由于:

结合式(1)和式(7),可发现:

即可以通过检测网侧电流误差Δis来代替APF桥臂输出电流误差Δic。
2 无负载侧谐波检测控制
无负载侧谐波检测控制如图2所示,依旧保留了APF经典控制中的电流控制器和直流侧电压闭环控制器,只是如前文所述采用Δis代替了Δic。
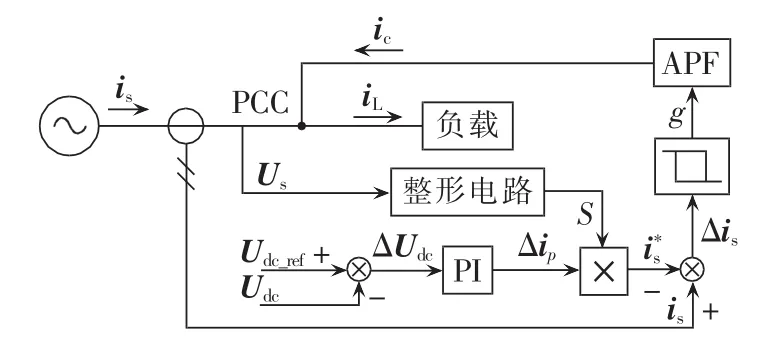
图2 无负载侧谐波检测的APF控制方案Fig.2 Strategy of APF control without load-side harmonic detection
参考电流i*s通过直流侧电压反馈得到。当负载电流的有功分量突增时,如果网侧电流没有来得及实时调整,则突增的这一部分有功电流将由APF桥臂输出电流提供,直流侧电容放电,电压下降。当直流侧电压低于设定值Udc_ref时,PI控制器输出的Δip会相应增大,则参考电流is*也会增大,由于电流控制器的跟踪控制使is去跟踪,导致桥臂输出电流ic输出有功分量减少,直流侧电压抬高恢复,这样就完成了谐波电流跟踪补偿。当负载电流有功分量突减时,情况反之亦然。
正是因为当负载电流的有功分量突增时,网侧电流可能来不及实时调整,当负载有功变化剧烈时,会导致直流侧电压迅速拖垮或冲飞,这无疑对系统的稳定性是有害的。
所以对于一般Us,经过整形电路得到的S就是一个和Us相位相同的正弦波,指令波is的幅值信息就完全由PI控制器决定,如果不想要一个过大的Kp参数,会在稳态时有一个较大的直流侧电压差ΔUdc,这样就使得直流侧电压有一个误差。所以本文将整形电路得到的波形乘上一个比例系数D,使得S=Dsin(ωt),尽量减小直流侧电压的偏差。
但是只是这么做还是不够的,最好的办法就是让网侧电流能够实时等于负载的基波有功电流。由于失去了负载侧信号的前馈控制,为了能够达到或者接近这一点,本文采用自适应滤波器预测算法对网侧电流进行提前一拍估算。
3 网侧电流自适应预测算法
3.1 自适应预测算法
文献[10-12]将基于有限脉冲响应(FIR)模型的自适应预测滤波器应用于APF控制中,自适应滤波器兼具了滤波和预测的功能。事实上,自适应滤波器的预测功能在各种形式的滤波器中都得到了验证,通过对离散化系统下一拍的预测,可以从信息处理方面解决数字化系统离散化延时和控制器件采样延时[11]。
文献[12]提出在进行横向滤波器参数滚动迭代的时候,将期望理论值 y(n)与预测值 yˆ(n)做差作为e(n)送入,如图3所示。然而,对APF参考电流的预测实际上是一个自回归(AR)模型,预测得到的y(n)是数据列本身的下一个值,即x(n+1)。而n+1时刻的实际电流正是需要预测的量,于是文献[9]中将e(n)≈x(n)-xˆ(n),用上一个周期的误差值去估计下个周期的滤波器系数,这样得到的滤波器权值实际上是H(n-1),毫无疑问,预测算法中差一拍会给整个系统带来新的误差延时。
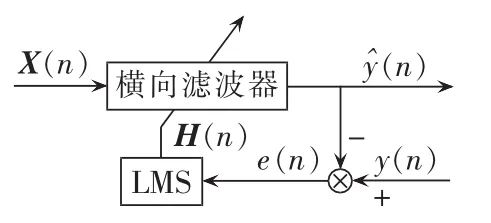
图3 自适应滤波器原理Fig.3 Principle of adaptive filter
对此,本文采用一种基于AR模型的自适应预测滤波器,如图4所示。首先根据历史数据I(n-1)通过自适应滤波器得到n时刻的预测参考电流 iˆ(n),再与n时刻期望值即当前时刻实际测量值i(n)相减得到误差信号e(n),这样通过新的滚动迭代得到的滤波器权值H(n)就是n时刻的期望权值。
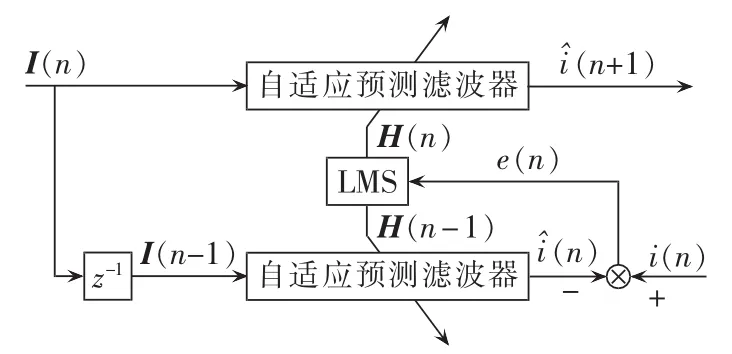
图4 自适应预测滤波器原理Fig.4 Principle of adaptive forecasting filter
自适应预测滤波器的预测精度在很大程度上取决于滤波器的系数,为了保证算法在动态条件下的鲁棒性,即保证预测算法对系统的时变性和负载的不确定适应性,应对滤波器系数进行反复的在线滚动优化[13]。
本文采用基于LMS变步长的自适应滤波器网侧电流预测方法,自适应模型的输出可以表示为当前和过去的输入XN(n)的线性组合:
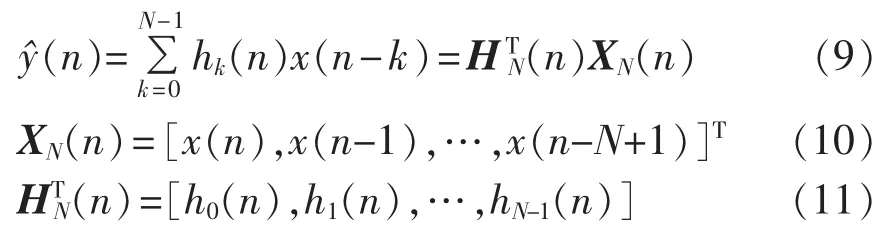
LMS算法的滤波器权系数滚动迭代,表示为:

基于LMS准则的自适应预测算法的收敛速度和步长μ的大小有关,当μ值较大时收敛速度得到提升,然而μ值过大又影响了算法的收敛性,即稳定性。因此在实际应用中μ的选取极为重要,为了解决这一问题,文献[14-19]提出了变步长自适应滤波算法。
文献[14]指出对μ的取值进行在线滚动优化,使得μ的取值能根据实时预测误差状况进行在线自适应调整,从而使自适应预测滤波器在系数的收敛速度和预测精度方面均取得良好的性能。
由于μ不断地进行滚动优化,可记为μ(n)。μ(n)滚动优化的目标是使函数最小。
文献[15]首先提出了步长因子μ随迭代次数n的增加而逐渐减小。文献[16]则将步长μ与均方瞬时误差 e2(n)建立了关系,使μ(n+1)=αμ(n)+γe2(n)。文献[17]给出了Sigmoid函数变步长LMS算法,其中。 针对 Sigmoid函数过于复杂,且在误差e2(n)接近零处变化太大、不具有缓慢变化的缺点,文献[18]在此基础上做出改进,步长的更新不需要用到上次的步长,给出了μ(n)=。 为了解决在低信噪比情况下APF能正常滤除基波信号,文献[19]利用误差信号的时间均值p(n)估计来控制补偿。
在众多文献研究的基础上,结合本文内容所述,当负载有功突变时,由于网侧电流来不及变化,可以在直流侧立即检测到电容电压降低(负载有功突增)、升高(负载有功突减)。所以本文以直流侧电压误差量作为变步长的前馈信号,通过自适应滤波器实时调整步长参数。步长的递推公式如下:

为了保证算法的稳定性,μє[μmin,μmax],其中 μmax接近补偿的临界稳定值,理论上为2/λmax,λmax为输入自相关阵的最大特征根,此时有较快的收敛速度,本文中取值0.1;μmin则兼顾收敛速度和预测精度是否失调,取一较小整数0.005。式(13)中α和γ的参数值选取参考文献[19],本文中 α=0.97,γ=0.0004。 式(14)中 β 称为遗忘因子,0<β<1,用来控制过去的数据对预测值的影响,1-β为时间均值估计权系数。
在步长公式中引入了p(n)以后,一旦跟踪信号发生突变,直流侧电压将实时受到影响变化,新的算法则会通过p(n)表现在步长上,稳态时μ主要考虑稳定性,动态时μ则主要兼顾收敛速度,这大幅提高预测精度。实际上通过式(14)可以看出p(n)其实是对ΔUdc的滑窗迭代,不断地对窗内数据进行加权平均计算,通过历史数据在线更新步长,更准确地预测未来趋势。
可能单从最终表达式上已经超出了LMS算法的范畴,而是介于LMS和最小递归二乘(RLS)算法之间,步长因子随着新进数据在线实时调整,对时间较近点的数据加以更大的权数。这也就是本文改进的算法在收敛速度和计算精度方面优于LMS算法的根本原因。实际上作为一种变步长的LMS算法,该算法的码元间计算量远小于RLS算法。在算法的速度和精度上都能满足APF应用要求。
3.2 网侧电流预测
基于无负载侧谐波检测的APF自适应预测方法如图5所示。它由网侧基波电流检测、自适应预测和补偿模块组成。
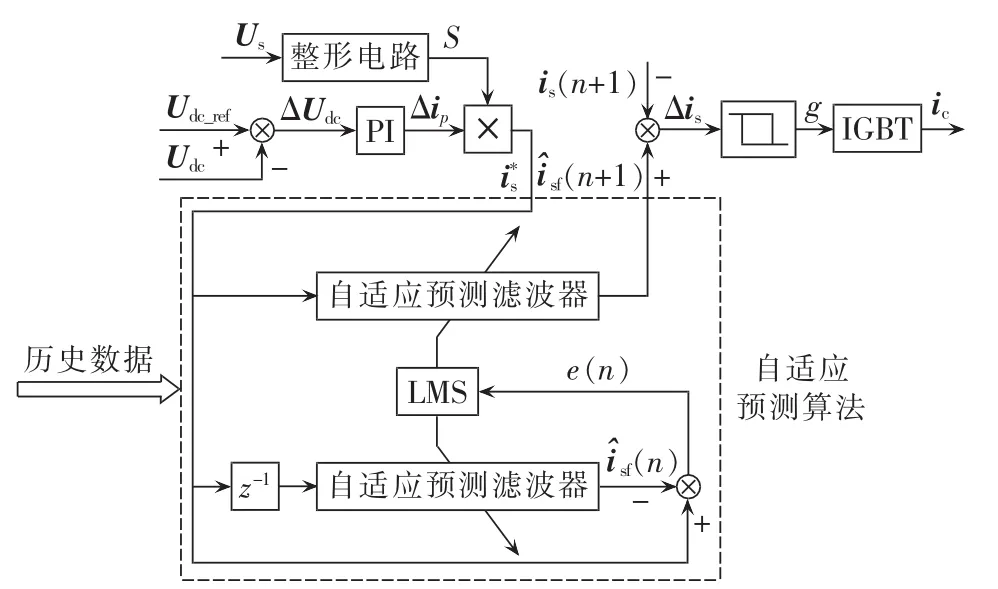
图5 电流自适应预测控制方法的示意图Fig.5 Sketch map of current adaptive forecasting control
通过直流侧电压反馈获得网侧基波电流,并将其和历史数据一起送入预测模块,预测模块采用变步长的自适应算法。为了提高运算速度,且没有必要将所有的历史数据送入预测运算,假设系统的每个工频周期采样M个点,在每k个采样周期进行一次自适应预测算法。如图6所示,从过去的一个周期中等间隔抽取N(N=M/k)个数据,用这N个数据进行自适应预测出n+k时刻的数据,再通过牛顿内插值法得到预测的每个点的值。
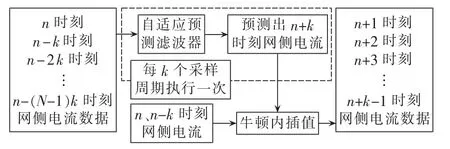
图6 自适应预测算法和牛顿内插值算法的数据流程图Fig.6 Data stream of adaptive forecasting algorithm and Newton interpolation algorithm
在程序初始化的时候为了有较快的响应速度,μ取 μmax,滤波器系数向量 HN=[0,0,…,0,1]T。
4 仿真及实验
4.1 仿真
为了验证无负载侧谐波检测的自适应预测算法的可行性和正确性,基于MATLAB/Simulink建立了如图2所示的系统模型。仿真系统参数为:380 V工频三相交流电源,系统阻抗忽略不计;非线性负载为三相不控整流桥,APF直流侧采用6800 μF电解电容,直流侧稳定电压800 V;输出滤波器为L滤波器,L=4 mH。
图7是无负载侧谐波检测环节的APF投入电网后稳定时的电网波形,从上至下依次是不加预测算法、定步长算法和本文提出的自适应预测方法。
图7 稳态仿真波形Fig.7 Simulative static-state waveforms
从图7中可以看出,在稳态时3种方法均能有效补偿系统谐波,无需负载电流的前馈信号。网侧电流THD分别为1.02%、0.78%、0.45%,均接近于完美正弦波,采用自适应预测算法可以弥补因为系统采样和数字离散化带来的延时。
为验证暂稳态情况下的动态性能,在整流桥直流侧接入两级阻感负载,次级为同样规格的负载。分别考虑在过零点和电流峰值时负载功率突变对系统的影响,如图8(a)所示,在负载电流过零点时并入二级负载。图8(b)分别显示了不加预测算法、定步长自适应预测和采用本文提出的变步长自适应预测时的网侧电流。
可以看出,当负载功率突变时,不加预测算法时网侧电流需要1.5个工频周期才能跟踪上电流;而采用定步长自适应预测算法后网侧电流跟踪松弛改善非常明显,只用了半个工频周期就可以跟踪上负载变化。当采用本文提出的在线迭代变步长自适应算法后,由于步长会迅速变大,所以在负载变化的前半个周期内预测速度显著提升。
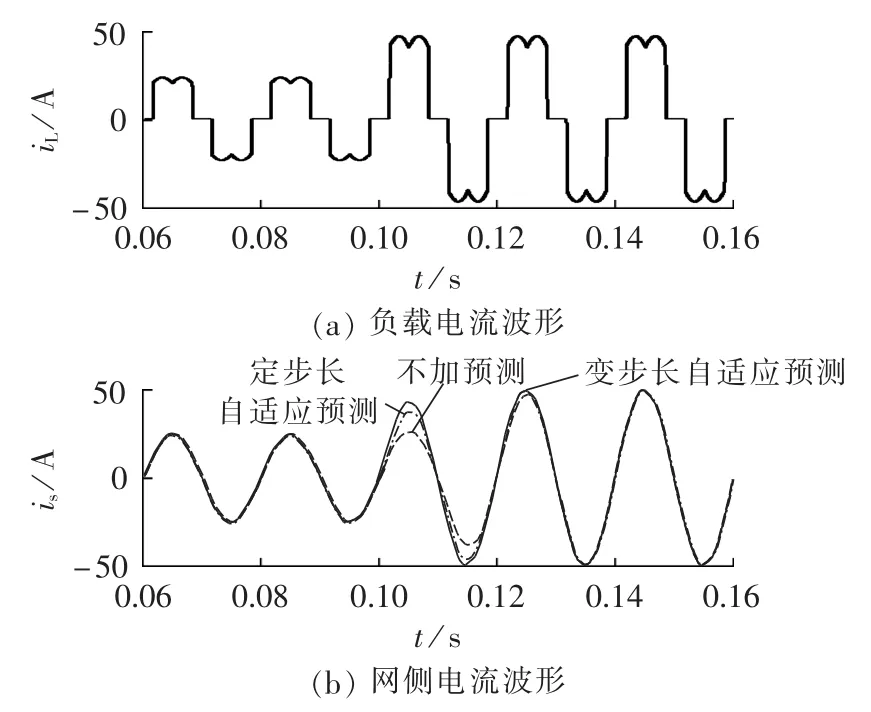
图8 电流过零点投入负载仿真波形Fig.8 Simulative waveforms of load inputted at zero-crossing point
为了进一步验证算法暂态性能,如图9(a)所示,当在网侧电流最大值时并入二级负载。图9(b)分别显示了不加预测算法、定步长自适应预测算法和采用本文提出的变步长自适应预测算法时的网侧电流。
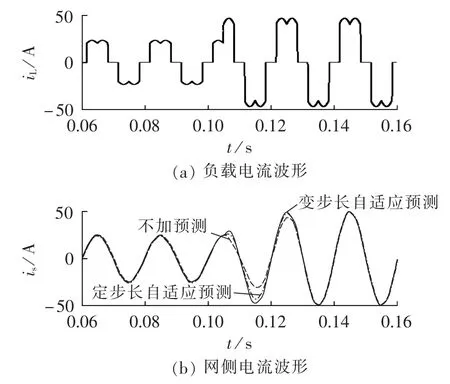
图9 电流峰值投入负载仿真波形Fig.9 Simulative waveforms of load inputted at peak point
从图9中可以看出,当在电流峰值时负载突变,无论加不加入预测算法,电流都不能够立刻反应,但是加入自适应预测算法后,电流在半个工频周期内就可以跟踪上负载变化。
在稳态阶段,自适应滤波器的权值会趋于最优,使得稳态误差接近零。但是在动态阶段,预测算法由于算法延时性,误差是不能够完全消除的。考虑到在峰值时预测值和理论值的误差最大,表1分别给出了仿真中负载突变时刻后,不加入预测方法、采用本文提出的预测方法时的第1个电流峰值和理论值的误差。
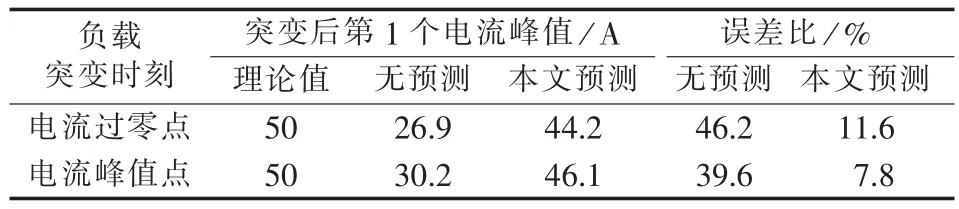
表1 预测仿真结果误差分析Tab.1 Error analysis for simulative results of forecasting algorithm
通过表1的对比可以看出,当负载突变时,采用本文提出的预测算法时的理论值误差要明显小于不加预测时的误差。
4.2 实验
为了进一步验证无负载侧谐波检测的APF自适应预测算法,研制了50 kV·A实验样机并完成了基于该控制策略下的APF全压并网实验。实验样机控制单元采用32位定点DSP芯片TMS320F2812结合FPGA芯片EP1C6Q240C8,双核实现数据运算与逻辑功能。IGBT模块采用西门康SKM400GB176D,IGBT驱动采用西门康SKHI23/17(R)。系统采样频率9.6 kHz,自适应滤波器维数为48,即每4个点进入一次自适应算法,这4个点内的数值通过牛顿内插值法得到。实验具体参数:380 V工频三相交流电源,系统阻抗忽略不计;非线性负载为三相不控整流桥,APF直流侧采用6800 μF电解电容,直流侧稳定电压800 V;输出滤波器为L滤波器,L=2 mH。实验采用TEK示波器DPO2024和电能质量测试仪FLUKE43B对实验波形进行数据记录。
当投入APF并网稳态运行时,采用无负载侧谐波检测控制自适应预测算法实验波形如图10所示。
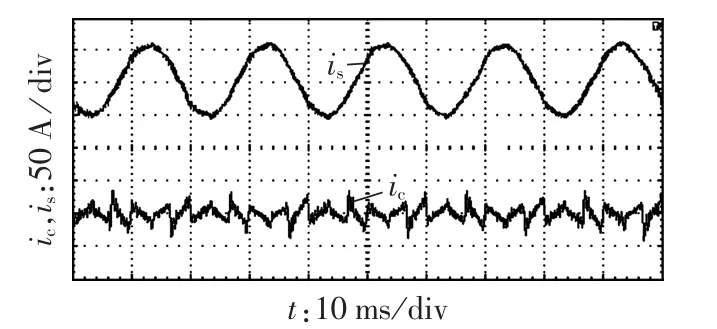
图10 稳态补偿波形Fig.10 Waveforms of static-state compensation
通过理论分析可知稳态运行时无负载侧谐波检测APF补偿效果和采用经典算法下的实验结果没有太大差别,图10中实验结果也再次验证了这一点。基于本文算法补偿前后网侧电流频谱分析见图11,THD从补偿前的28.3%改善到补偿后的3.2%。
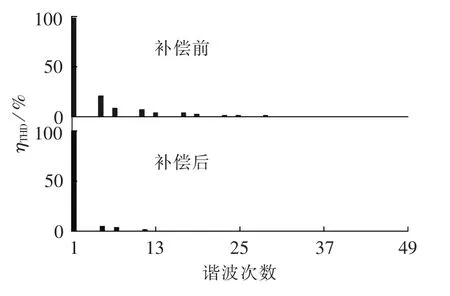
图11 补偿前后网侧电流THDFig.11 THD of grid-side current before and after compensation
无负载侧谐波检测APF补偿结果受到动态负载的影响较大,为了验证其加入自适应预测后的结果,本文对变化的负载进行了实验。为了更全面地说明预测效果,同样分别在过零点和电流峰值点投入二级负载。
图12分别为不加预测算法和自适应预测算法情况下在网侧电流过零点投入二级负载的动态实验波形。图12(a)中不加预测算法,在第1个工频周期内网侧电流最大值没有达到新的稳态值,系统暂态反应时间t1约为21 ms;图12(b)采用变步长自适应预测算法,系统暂态反应时间t2明显减小,大约需要13 ms。
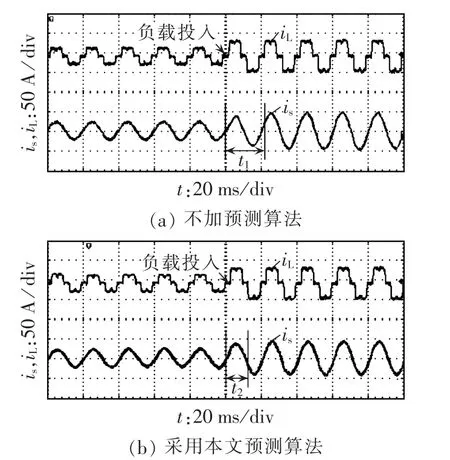
图12 电流过零点投入负载实验波形Fig.12 Experimental waveforms of load inputted at zero-crossing point
图13分别为不加预测算法和自适应预测算法情况下在网侧电流最大点投入二级负载的动态实验波形。图13(a)中没有预测算法,系统暂态反应时间t3约为18 ms,而加入本文所述预测算法后(见图13(b)),可以很清楚看出在第2个波峰到来时波形就达到新的稳态,系统暂态反应时间t4约为9 ms。
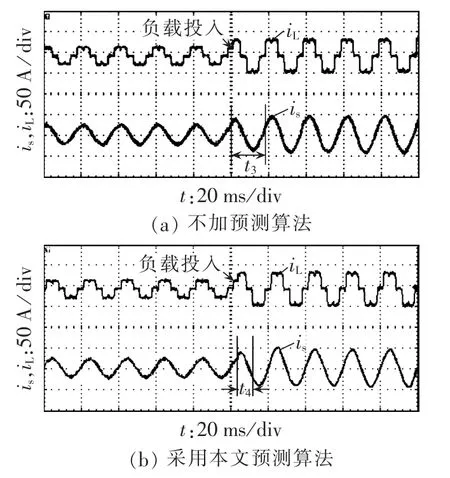
图13 电流峰值投入负载实验波形Fig.13 Experimental waveforms of load inputted at peak point
通过2组对比试验可以看出当采用本文提出的自适应预测算法后,无负载侧谐波检测APF动态性能提升明显,预测算法的加入弥补了在负载变化时缺少负载电流前馈的作用。
同样考虑到动态时预测会出现误差,在峰值时预测值和理论值的误差最大,表2给出了实验中负载突变时刻后,不加入预测方法、采用本文提出的预测方法时的第1个电流峰值和理论值的误差。
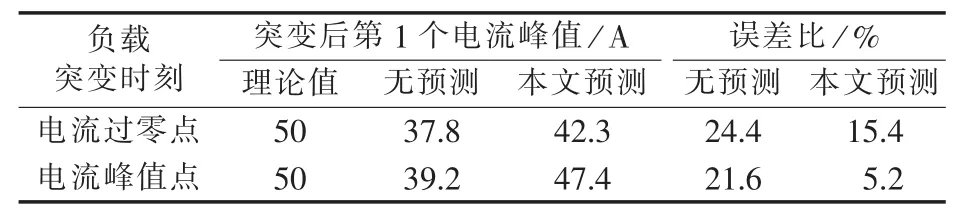
表2 预测实验结果误差分析Tab.2 Error analysis for experimental results of forecasting algorithm
通过表2的对比可以看出,实验结果和仿真结果趋势基本一致,再次验证了预测算法的有效性。
5 结论
直接通过直流侧电压反馈控制而无负载侧谐波检测的APF算法可以等效经典传统的谐波检测算法,但是由于缺少了负载电流前馈环节,在负载动态变化时补偿会出现跟踪松弛现象。对此本文提出了一种基于LMS算法的自适应AR模型,利用横向滤波器步长实时变化,系数动态滚动,结合牛顿内插值法可以有效预测下一拍的网侧电流数据。仿真和实验验证无负载侧谐波检测的APF自适应预测算法的正确性和可行性。
