SRM的低转矩脉动低铜耗直接瞬时转矩控制
2014-09-22,,
,,
(中国计量学院机电工程学院,浙江杭州 310018)
1 引言
电动车辆的电动机牵引系统,要求具备快速实时的转矩控制能力和较低的转矩脉动及噪音,而由蓄电池供电的电动车辆,基于续航里程的要求,也特别关注效率指标。一直以来,此类领域基本为永磁同步电动机和异步电动机为主导占据。而开关磁阻电动机本身相对前两者也具有相当的优势,诸如更低的成本、更简单坚固的结构、优秀的启停控制能力等优点。近些年来,国内外关于开关磁阻电动机应用于电动车辆的研究和实践日渐增多,但仍存在诸多问题。
目前,针对直接瞬时转矩控制应用于开关磁阻电动机的研究也较多[1-8],但往往针对4相以下的电动机或进行两相以内的绕组同时供电的转矩分配控制,如果该类电动机为4相或以上,就显得控制方式不够灵活、经济。本文结合4相开关磁阻电动机,提出多相转矩分配策略,以降低转矩脉动为目标,同时增强了电动机的转矩输出能力,提高了功率密度,同时结合低损耗换相策略,降低了电动机绕组铜耗进而提高了效率。
2 基于转矩分配策略的直接瞬时转矩控制
图1为传统的基于转矩分配函数的直接瞬时转矩控制原理图。它包括转矩分配、转矩-电流转换、电流控制、转子位置与定子电流检测等单元。

图1 基于转矩分配函数的直接瞬时转矩控制原理Fig.1 Schematic diagram of direct instantaneous torque control based on torque sharing function
图1中,给定转矩Tref,利用转矩分配函数,结合转子位置,输出产生各相的转矩参考值Ti.ref(i表示4相电机的A,B,C,D 4相绕组);然后经过转矩-电流转换器,结合转子位置信息,输出各相电流参考值;电流控制器为一滞环控制器,有的系统也采用转矩—磁链转换器和磁链控制器,即用磁链代替电流[1]。
在产生转矩脉动的换相期间,根据各相合成指令转矩给各相的分配方式不同,将有无数个转矩分配函数曲线,比较经典的是直线型和正弦型转矩分配函数曲线,分别如图2a、图2b所示。
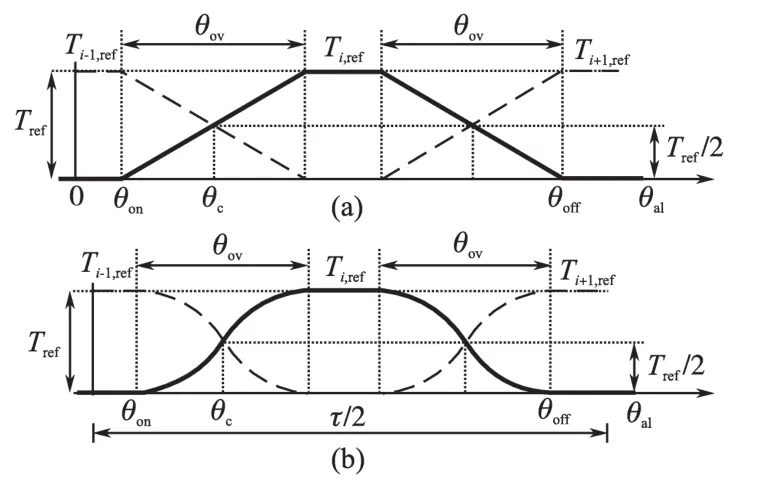
图2 直线和正弦型转矩分配函数曲线Fig.2 Torque sharing function curves of linear and sinusoidal
第i相的转矩参考值Ti.ref可被定义为

式中:frise(θ),ffall(θ)均为小于1大于0的系数,并且根据转子位置实时变化;θov为前后重叠区的角度值。
一般事先通过实验,离线计算出电流、转矩、转子位置三者相对应的三维查询表,从而可根据检测的电流和转子位置,查得实时的转矩参考值供输出到下一步。该传统方法需离线计算、缺乏灵活性。
3 降低SRM转矩脉动与铜耗的转矩分配新策略
本文提出的通过电动机模型在线滞环控制的直接瞬时转矩控制方法,定义为预测PWM直接瞬时转矩控制,与以往的最大不同有两点:一是它可以同时分配控制两相以上的相转矩,相应的称为多相转矩分配函数,其中心任务是优化总转矩进而减小转矩脉动;二是增加了换相期间的相电流控制器,目标为换相绕组铜耗的最小化。其原理如图3所示。

图3 基于多相转矩分配函数的预测PWM直接瞬时转矩控制原理Fig.3 Schematic diagram of predictive PWM direct instantaneous torque control based on multi phase torque sharing function
对于4相或以上的多相绕组SRM,转矩分配函数如果同时分配输出两相以上的转矩分量,进而就能有效利用电动机。因为按照SRM的电感、位置角、电流关系模型,会出现多相绕组电感模型重叠的情况,此时任意时刻有两相以上的绕组具备通电后建立的磁链能激发产生正能量转矩,相数越多则转矩分配分量维数越多[9-12],对合成后的转矩脉动的抑制效果就越好。由于随着转子位置的不同,各相情况实时变化,所以一般需建立一个相序表(见图3)供转矩分配函数查询,同时该表需要按照优先级分配,并且是动态的,在不同的转子位置,不同的电角度区间,不同相所产生的转矩不同(类似式(1)所示)。离线计算每相的导通区间角度范围,在线计算实际各相开关角,但不能超越离线计算的范围。
根据电机先期特性实验结果以及有关实时检测参量,建设估计器和转矩预测器,预估后2个PWM采样周期的转矩值,并与相序表、给定转矩一并作为多相转矩分配器的输入。引入换相(铜损)电流控制器,用于优化绕组电流值,从而可对降低铜损起到作用,因为电流值与转矩给定和实时转子位置角有关,所以它的输入是给定转矩和估计器输出的转子角度,它的输出也作为多相转矩分配器的输入。PWM控制信号的占空比则依据转子位置及给定参考相转矩确定。下面详细介绍该多相转矩分配算法以及降低换相铜耗的算法。
3.1 动态多相转矩分配算法
根据转子位置信息,带有动态优先级的多相相序表是进行多相转矩分配的基础,多相转矩分配算法原理如图4所示。

图4 多相转矩分配算法原理Fig.4 Schematic diagram of multi phase torque sharing algorithm
该算法可处理任意相数。首先,需要获得最小转矩值Tmin:

它在一个采样周期内,当遇到供电直流电压相对为负时,由全部的各相最小转矩值Ti,min(见图3)合成,Nph表示相数。Tmin与给定参考总转矩Tref比较后产生转矩差ΔT1,此时需应用相序表在可激励相(通电后能产生转矩的相)间进行ΔT1的分配,根据转子旋转方向和定子各相的顺序进行,每个采样周期中表内所包含的相及其顺序和优先级都更新一次,最优先开通相定义为第一相q=1,ΔT1首先与第一相的最大剩余转矩量ΔTq=1,max比较,且:

然后,基于最大剩余转矩量分配获得的第q相的参考转矩差:
δ1(x)为Heaviside函数,它决定转矩方向:

获得ΔTq,ref后,参考相转矩可得:

假设,该相不能传递(分配)转矩差ΔTq,就产生最大相转矩Tq,max为止。否则进入相序表中的下一相进行转矩分配:

3.2 换相绕组铜耗最小化算法
基于多相转矩分配算法,通过换相期间对相电流的控制来减小换相期间相电流有效值,进而减小绕组铜损耗。
换相期间总的铜损耗为
式中:θph为换相期间每相的电角度;Nph为电动机相数;Pcu(T,θ)为换相期间其中一侧的铜耗,它与实时的转子位置和转矩有关,根据电机的电流检测和转子位置检测信息,可建立T(I,θ)关系,进而反推出I(T,θ);Rph为相电阻。
σ参量规定了换相期间前后相之间的转矩分配比例,它是大于零小于1的一个参量。从而可看出式(8)中右端两相分别为换相期间前后相的铜耗,它们的和即为换相的总铜耗。从该式也可看出,θ与σ为实时变量,其中σ是根据换相期间每次采样结果按照比例做出调整,根据图3算法,每次采样预测后2个周期的参量(位置、转矩,但磁链预测后一次的),利于计算并及时输出控制量,考察指标以变量作为输入,电流作为输出,即该算法实为一换相期间以降低电流有效值为目标的电流控制器。
基于此换相期间损耗数学模型,实现铜耗减小的目标,它不需要任何的离线计算内容,不需要重复计算开关角。但是,理论上来说,如果采样周期过大、电动机速度过高(换相时间过短),则降低铜耗的效果有限就难于实现了。
4 仿真与实验
仿真与实验对象为一台4相8/6极结构的开关磁阻电动机,具体参数为:额定功率3 kW,额定转矩6 N·m,额定转速1 500 r/min,供电电压DC 48 V,最大电流130 A,采样频率15 kHz。
4.1 仿真
图5所示为应用了多相转矩分配算法的预测型PWM直接瞬时转矩控制的SRM系统相电流、转矩及总转矩结果,给定转矩为4 N·m,速度值为250 r/min。从转矩仿真结果看,转矩脉动率基本在1%左右,主要体现在换相期间的转矩脉动相对较大。相电流在上升期间有明显的超调,存在短暂的一个峰值电流。

图5 多相转矩分配算法仿真结果Fig.5 Simulation results of multi phase torque sharing algorithm
图6所示为在图5基础上,增加了换相期间的基于减小换相绕组铜耗的电流控制器的仿真结果。相对来说,相转矩波形变得平滑,相电流波形变化明显,没有了电流超调,换相期间低电流区域增加。
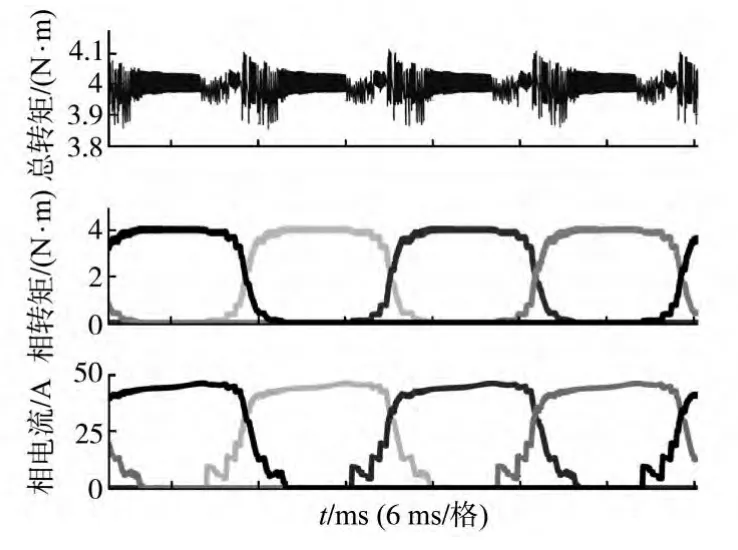
图6 增加了换相损耗电流控制器的仿真结果Fig.6 Simulation results of increasing current controller of commutation loss
可见在低速期间,采样频率较高时,采用换相电流控制器后,换相期间的电流下降和上升均体现了一定的阶梯性变化,低电流区域增加,总有效值电流降低。
4.2 实验结果
为了利于转矩预测,实验之前需预先对该电动机做机械特性(转矩与位置角、电流之间关系)等试验内容,另外也需测试绕组电阻等常规值。电动机控制系统以TMS320F28335的DSP为主控,IGBT为主开关,实验中PWM开关频率控制在4~15 kHz之间。
图7为传统直线型转矩分配算法与采用多相转矩分配策略之后的电动机转矩情况。电动机转矩脉动率在采用新算法后有明显改善,根据对比核算,采用动态多相转矩分配策略之后,转矩脉动率相对传统直线型下降了55%以上。
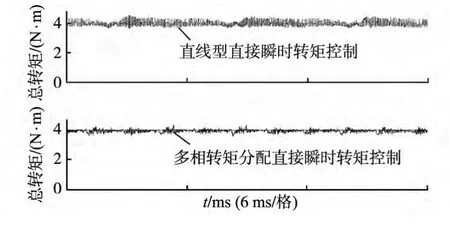
图7 传统直线型与多相转矩分配直接瞬时转矩控制Fig.7 Direct instantaneous torque control of linear and multi phase torque sharing
图8所示为应用换相电流控制器前后的某相电流波形,应用换相电流控制器之后,电流有效值下降,也没有明显的超调峰值。
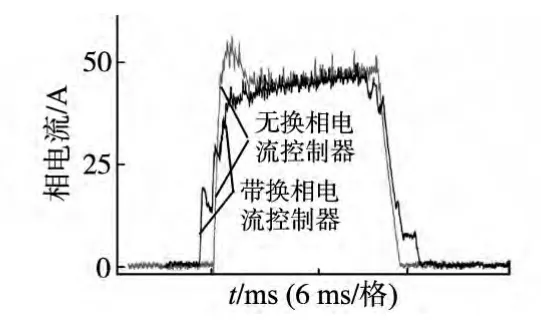
图8 换相电流控制器增加前后的换相电流Fig.8 Commutation current of commutation current controller is added before and after
根据计算,换相期间有效相电流值下降5.5%,相应铜损耗下降约10%,一般满载运行时铜耗在电动机总损耗中占比最大,对降低总损耗的意义是比较明显的。如果再考虑到转矩脉动的降低对输出功率增量的贡献,二者相加势必对电动机的效率提升具有相当实际意义。
5 结论
动态多相转矩分配策略解决了对多相SRM有效控制的问题;预测型PWM调制通过提前预测采样值进行部分参量的计算;它们结合直接瞬时转矩控制思想完成了低转矩脉动输出的控制。换相电流控制器通过电流的调节降低换相期间的有效电流值并进而降低铜耗提升效率。本文从理论、仿真及实验上证明了该综合方法的有效性,但目前仅限于在电动机低速运行的范围之内。
[1]Xue X D,Cheng K W E,Ho S L.Optimization and Evaluation of Torque-sharing Functions for Torque Ripple Minimization in Switched Reluctance Motor Drives[J].IEEE Trans.Power Electron.,2009,24(9):2076-2090.
[2]Sahoo S K,Panda S K,Xu J X,Iterative Learning Control Based Direct Instantaneous Torque Control of Switched Reluctance Motors[C]//in Proc.IEEE Power Electron.Spec.Conf.,2004:4832-4837.
[3]Lee D H,Liang J,Lee Z G,et al.A Simple Nonlinear Logical Torque Sharing Function for Low-torque Ripple SR Drive[J].IEEE Trans.Ind.Electron.,2009,56(8):3021-3028.
[4]Inderka R,De Doncker R.High-dynamic Direct Average Torque Control for Switched Reluctance Drives[J].IEEE Trans.Ind.Appl.,2003,39(4):1040-1045.
[5]Hannoun H,Hilairet M,Marchand C.Design of an SRM Speed Control Strategy for a Wide Range of Operating Speeds[J].IEEE Trans.Ind.Electron.,2010,57(9):2911-2921.
[6]李珍国,阚志忠.开关磁阻电机的高效率直接瞬时转矩控制[J].电工技术学报,2010,25(8):31-38.
[7]程勇,林辉.五电平拓扑下开关磁阻电机直接瞬时转矩控制[J].电机与控制学报,2011,15(4):18-22.
[8]张艳杰,徐丙垠,熊立新,等.基于SRM直接转矩控制的风力机模拟器[J].电力自动化设备,2011,31(5):15-20.
[9]Vuji V P,Vukosavi S N C,Jovanovi M B.Asymmetrical Switched Reluctance Motor for a Wide Constant Power Range[J].IEEE Trans.Energy Convers.,2006,21(1):44-51.
[10]Vuji V P.Modeling of a Switched Reluctance Machine Based on the Invertible Torque Function[J].IEEE Trans.Magn.,2008,44(9):2186-2194.
[11]曲兵妮.开关磁阻电机互感及转矩脉动抑制技术的研究[D].太原:太原理工大学,2010.
[12]Lee J W,Kim H S,Kwon B I,et al.New Rotor Shape Design for Minimum Torque Ripple of SRM Using FEM[J].IEEE Trans.Magn.,2004,40(2):754-757.
