基于云重心判读法的瞄准误差影响度分析*
2014-09-20郭晓沅黄建祥
郭晓沅,黄建祥
(63817部队,四川西昌 615000)
0 引言
目前,利用地面瞄准设备对导弹武器系统实施初始方位瞄准,属于一次性测量,无法以多次测量的平均值为准进行平差。所以,在进行瞄准误差预估时,均采用极限误差预估法,即,通常取随机误差的3倍标准偏差作为极限误差,再与系统误差综合。对各类测量误差合成时,则取其方和根作为总误差的极限误差。此法对瞄准误差影响度的分析和预估针对性和客观性不够。
如何实现对导弹瞄准误差进行科学预估,提高导弹武器系统瞄准精度,是靶场测发系统当前科研工作的一项重要内容。文中采用“云重心”这一套成熟的“软”边缘性理论,对种类繁多、关系复杂的影响因素进行数据发掘和信息处理,再通过科学计算给出瞄准误差对导弹命中精度影响的定量分析,对瞄准误差进行科学预估,不仅可以为试验任务圆满成功提供保障,而且可以提高被试武器系统性能指标的考核标准。
1 “云重心”理论
“云”是指在模糊集合理论和概率理论交叉渗透的基础上构造的特定算法,它用语言值表示了某个特定性概念与其定量表示之间的不确定转换,揭示了随机性和模糊性的内在关联。云的数字特征用期望值Ex、熵En和超熵He三个数值特征表征,它把模糊性和随机性完全集成到一起,构成定性概念与定量表示间的相互映射。
“云重心”可以表示为T=a×b。a表示云重心的位置,b表示云重心的高度。期望值反映了相应的模糊概念的信息中心值,即云重心位置。当期望值发生变化时,它所代表的信息中心值也相应的改变。期望值相同的云可以通过比较云重心的高度来区分它们的重要性,即云重心高度反映了云的重要程度。
下面以某新型导弹武器飞行鉴定试验为例,说明如何使用云重心判读法对方位瞄准包含的误差项及其对瞄准误差的影响进行分析。
2 瞄准误差分析步骤
云重心评判法是一套比较成熟的评估体系,使用该方法进行导弹瞄准误差分析预估可依循图1所示流程来进行。
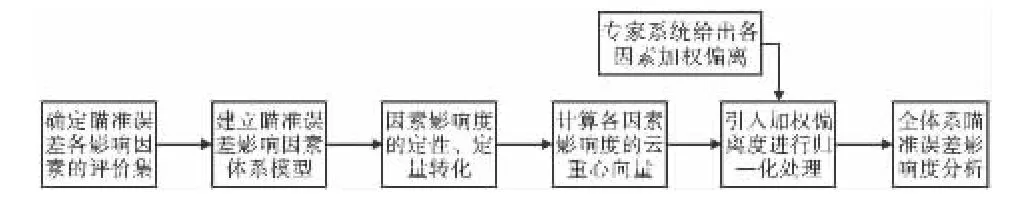
图1 云重心评判法流程图
2.1 确定评价集
构建一个具有11个评语集的定性评测云发生器,将影响导弹瞄准误差的各因素的影响度对应于不同的评语。其评语如图2所示。

图2 云发生器
2.2 建立瞄准误差影响因素体系
飞行鉴定试验中,影响导弹瞄准误差的因素主要有基准方向的测定误差与寻北误差、射向标定误差、调直调平误差、方位瞄准误差、射向变换误差及其它误差。每一种误差又由不同的误差源(子因素)组成,如图 3所示。其中,M=Mij(i={1,2,3},j={1,2,3}),表示体系中的各方面的影响因子。
2.3 专家给出子因素影响度状态
在导弹武器系统靶场飞行鉴定试验前,工业部门提前给出的各影响因子的定量指标如表1所示。

表1 各影响因子体系定量参数表
根据专家系统提出的建议给出各影响因素在整个体系中所占的权重,可以得到全系统分析结果的可信度。例如,对于M2射向标定误差影响因素分系统,有7名专家根据以往试验瞄准经验给出各个子因素的影响度,如表2所示。

图3 瞄准误差影响因素体系

表2 M2分系统各因素影响度状态表
2.4 因素影响度量化
根据评价集评语等级将定性的影响度进行量化,通过云模型关于计算期望和熵的公式为:

可以计算求得各子因素的期望值和熵如表3所示。
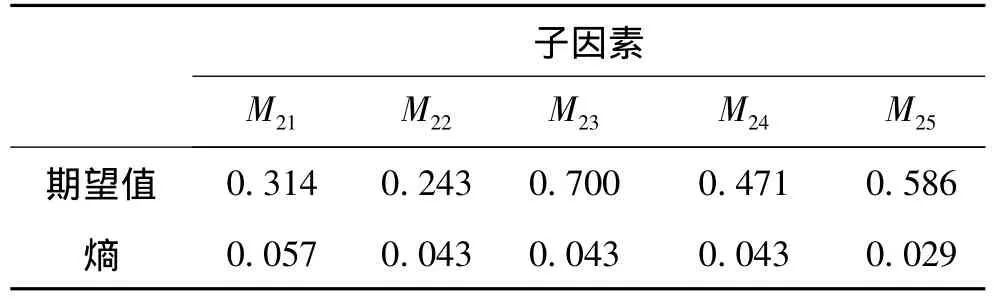
表3 M2分系统子因素期望值和熵
2.5 确定各子因素影响度云重心向量
由于瞄准过程中各状态所处的量值不均等,不能在同一量级上进行统计,故根据飞行数据给出各子因素的乘法因子Ni,进而得到各子因素在M2中所占权重:,经计算如表4所示。

表4 M2分系统子因素乘法因子和权重值
在云理论计算中,m维综合的重心T可以表示成一个 m 维向量,即 T=(T1,T2,…,Tm),其中 Ti=ai× bi,i=1,2,…,m。因为重心向量 T 与理想状态下的重心向量T0存在偏差,对T进行归一化处理,即可得到一组有大小、有方向、无量纲的值TG。如表5所示。

表5 M2分系统子因素云重心向量
2.6 计算加权偏离度并归一化处理
依据云理论,各子因素影响度距理想状态下的加权偏离度可通过式,经计算得θ=-0.905,将加权偏离度θ放入评测云发生器,θ值位于“极低”和“非常低”两个等级之间。因此,M2因素的影响度表示为介于“极低”和“非常低”之间,更倾向于“非常低”。
其他4个分系统及全系统的加权偏离度计算原理与M2分系统的计算原理相同,各分系统云重心向量如表6所示。根据专家给出的5个分系统权重,通过公式,其中θi表示第i个分系统的加权偏离度的归一化处理结果,TGi表示第i个分系统在整个体系中所占权重,得到各影响因子全体系的影响度 0.198。

表6 各分系统云重心向量
2.7 全体系散布影响度分析
将全体系的影响度D=0.198放入评测云发生器,D值位于“非常低”和“很低”两个等级之间,接近于“很低”等级。因此针对此次飞行鉴定试验的瞄准误差对导弹命中精度的影响度可以确定为很低。
3 云重心判读法的MATLAB实现
3.1 程序流程图
程序设计流程如图4所示。
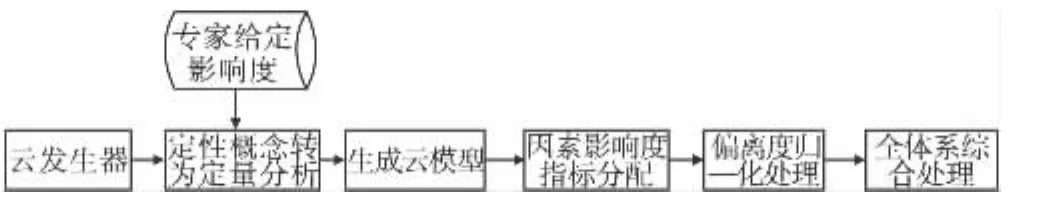
图4 软件设计流程图
3.2 部分关键代码
1)云发生器的实现
云发生器是采用中心极限思想,通过正态分布函数R=normrnd(Mu,Sigma,m,n)生成正态随机数。根据Ex、En、He生成云滴的关键代码如下:

2)云重心向量归一化代码
对于导弹瞄准误差影响体系,中性评价指标对于全体系的影响度较小,可以忽略。依据公式:

可编写关键代码如下:

4 结束语
瞄准误差影响度分析是导弹武器系统作战试验风险研究的重要课题,采用云重心评判法进行瞄准误差影响度分析,并对其科学预估,可以减小导弹武器系统作战试验风险。将云重心评判法应用于瞄准误差影响度分析领域在国内尚属首次,也将为瞄准方案制定、瞄准误差分析提供新的方法和思路。
采用该方法对各影响因子影响度进行定性分析时,需要在对已有的大量试验数据进行分析总结的基础上完成。目前靶场关于瞄准误差影响度信息数据库较小,对各影响因子影响度的定性分析存在偏差,进而对试验整体情况产生影响。随着靶场瞄准误差影响度信息数据库的逐渐积累,采用云重心评判法可以对各影响因子的影响度给出更准确的定性分析。
[1]王峰,王刚,赴京来,等.云重心判读法理论及应用前景[J].靶场试验与管理,2012(2):31-35.
[2]谭立龙,李峰.导弹瞄准技术基础[M].西安:第二炮兵工程学院出版社,2010.
[3]龚纯.MATLAB从入门到精通[M].北京:电子工业出版社,2009.
[4]关正西.导弹武器系统概述[M].西安:第二炮兵工程学院出版社,2008.
[5]薛成位.弹道导弹工程[M].北京:中国宇航出版社,2002.
[6]余旭东,葛金玉,段德高,等.导弹现代结构设计[M].北京:国防工业出版社,2007.
