平面三自由度可控挖掘机构动力学建模与控制器设计*
2014-09-17潘宇晨蔡敢为吴笃超张金玲高德中
潘宇晨 蔡敢为 吴笃超 张金玲 高德中
(1.钦州学院物理与电子工程学院,钦州 535099)(2.广西大学机械工程学院,南宁 530004)(3.国电科学技术研究院,南京 210031)
平面三自由度可控挖掘机构动力学建模与控制器设计*
潘宇晨1,2蔡敢为2†吴笃超3张金玲2高德中2
(1.钦州学院物理与电子工程学院,钦州 535099)(2.广西大学机械工程学院,南宁 530004)(3.国电科学技术研究院,南京 210031)
以一种平面三自由度可控挖掘机构为例,运用拉格朗日方法建立了机构的刚体动力学模型,求解得到了各主动杆的系统广义力;进而针对其半闭环控制系统的控制策略进行研究,基于机构驱动元件-交流控制电机及其驱动器的数学模型,运用模糊算法设计了一种模糊-PID双模控制器并对其进行仿真分析.结果表明:基于模糊算法的控制器在超调量、调节时间、上升时间和抗干扰能力等方面均具有较好性能,满足系统的控制要求.
多自由度可控机构, 挖掘机, 动力学, 模糊-PID控制
引言
挖掘机广泛应用于工业、交通、民用建筑、矿山采掘等机械化施工方面,主要有液压式和机械式两种类型.液压挖掘机具有结构简单、重量轻、可实现很多复杂动作等优点,但也存在着液压系统零部件加工装配要求高、寿命不长、漏油等问题.因此液压式挖掘机多为中、小型挖掘机,许多大型挖掘机还不得不采用电力驱动的机械式挖掘机[1].机械式挖掘机具有作业效率高,使用寿命长,能适应恶劣的矿山工作环境等特点[2].但传统的单自由度机械式挖掘机自身结构庞大复杂且不能完成灵活多变的挖掘动作.这是工程机械领域长期未能解决的棘手难题.
多自由度可控机构是机械技术与电子技术有机结合的产物[3],多自由度可控机构是机械技术与电子技术有机结合的产物,具有输出柔性化、刚度高、惯量低、承载能力强、动力学性能好等特点.上世纪90年代初以来,有关这类新型机构的研究得到了足够的重视,如:构型分析[4]、运动学综合[5]、动态优化综合[6],应用可控机构的压力机的研究[7-8]等问题得到了较广泛的研究.
将多自由度可控机构应用于挖掘机的创新设计研究发明的新型挖掘机构[9-10],如图1所示,由两部分组成:第一部分为平面二自由度五杆机构,两根主动杆分别由两个控制电机控制,可通过编程实现输出端在工作空间内复杂轨迹的输出;第二部分为铲斗调整部分,由单独的控制电机驱动,配合实现铲斗的翻转,姿态保持与调整等动作.这类挖掘机可方便地实现柔性化的运动输出规律,且各零部件加工装配要求不高,能克服液压系统零部件加工精度要求高、维修保养成本高、容易漏油等缺点.且采用外副驱动闭链传动的方式,机构刚度特性较好、承载能力强、误差累积小,并且所有驱动电机均安装在机架上,机构运动惯量小、动力学性能好,能有效避免串联式机械手驱动装置大都安装在铰接处所导致的刚性差、惯量大、关节误差累积等问题.
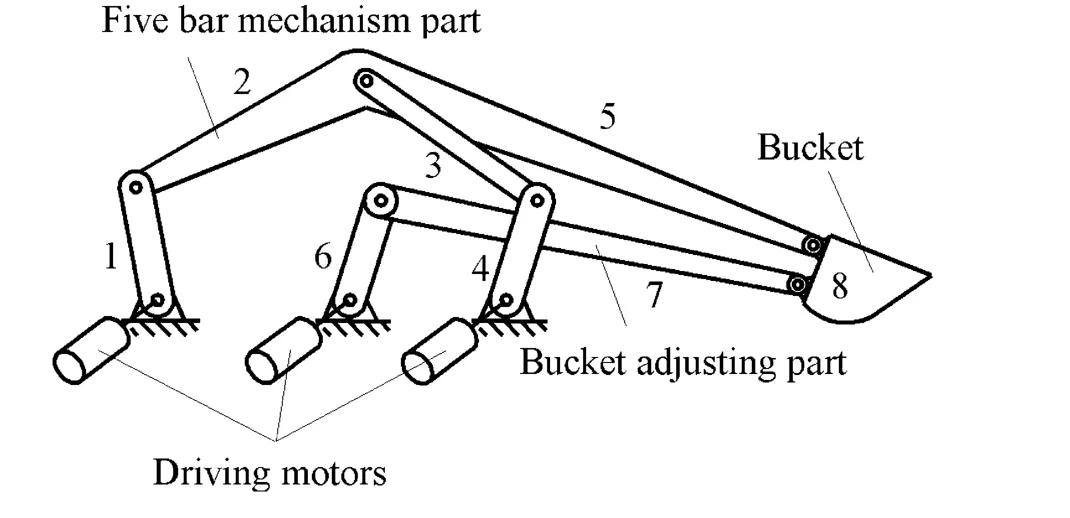
图1 新型挖掘机执行机构结构示意图Fig.1 Prototype of the executive mechanism of the novel excavator
首先运用拉格朗日方法建立了机构的刚体动力学模型,得到了各主动杆的系统广义力,进而针对其半闭环控制系统的控制策略进行研究,基于机构驱动元件-交流控制电机及其驱动器的数学模型,运用模糊算法设计了一种模糊-PID双模控制器,并与传统PID控制器进行了对比研究.结果表明:基于模糊算法的控制器在超调量,调节时间,上升时间和抗干扰能力等控制性能方面均强于PID控制器,满足系统的控制要求.
1 刚体动力学模型
参照图2,设各活动构件的质心速度为vi(i=1~8),绕其质心的转动惯量为Ji,机架为B0.选取O点处为零势能面位置,不计构件的弹性形变和摩擦,则新型可控挖掘机构的总动能E和总势能U分别为:
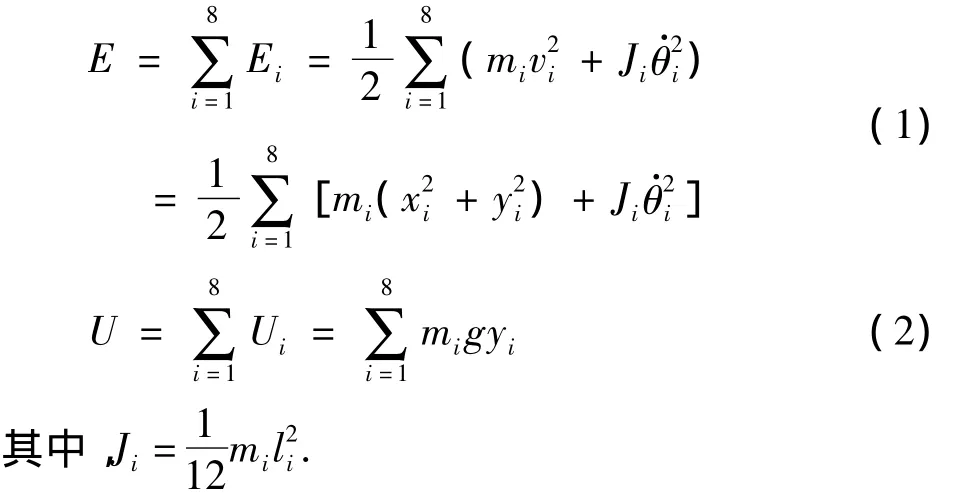
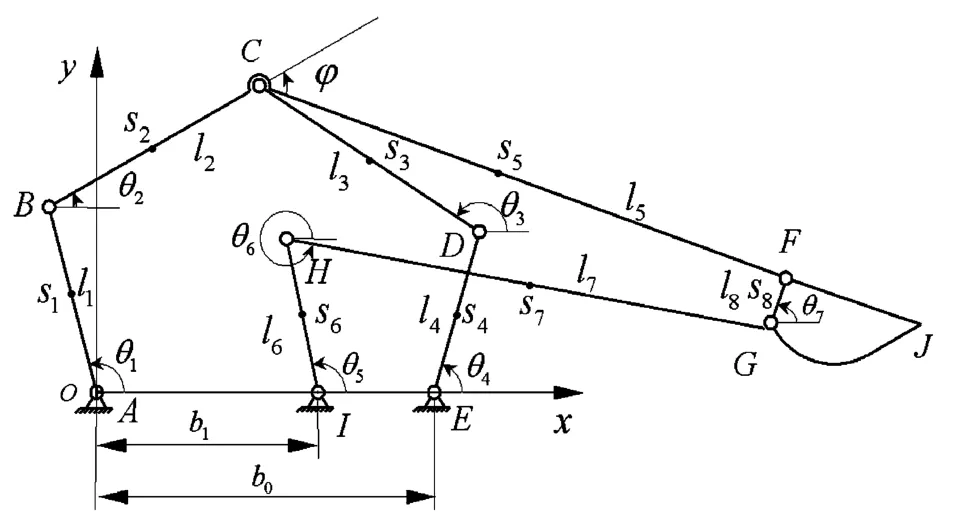
图2 机构的结构简图Fig.2 Sketch of the executive mechanism

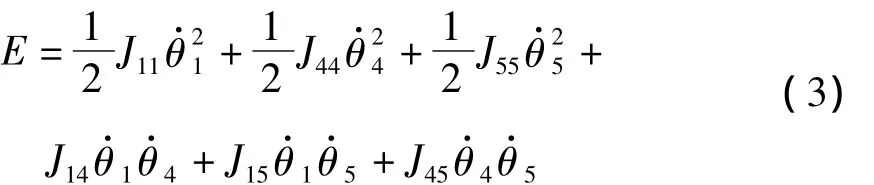
将式(2)和式(3)带入拉格朗日方程,则可得到机构三根主动杆的系统广义力:

其中:F1,F4,F5为三根主动杆的系统广义力;J11、J44、J55、J14、J15、J45为等效转动惯量;θ1、θ4、、θ5、分别表示三根主动杆的角位移、角速度和角加速度,由机构的运动学分析可得到[11-13].
2 控制器设计
2.1 交流控制电机及其驱动器数学模型
设粘滞摩擦系数B=0,由叠加原理可以得到交流伺服电机输入与输出的传递函数[14]为:
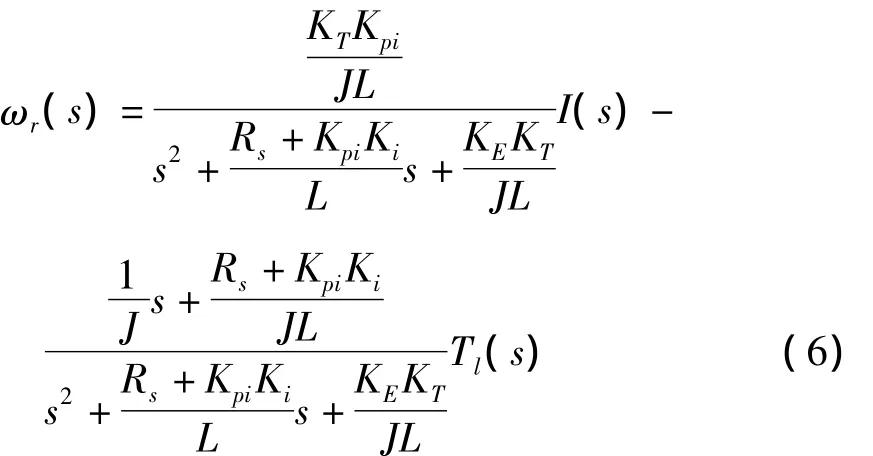
式中,电流环增益Kpi=10,感应电动势常数KE=1.17V·s/rad,转矩系数KT=1.17N·m/A,电流反馈系数Ki=0.51V/A,惯量J=19 ×10-4kg·m2,定子绕组电阻Rs=2Ω,电枢电感L=0.1H,I(s)为电流,Tl(s)为非线性时变的负载力矩.
模糊控制器不需要建立精确的被控对象数学模型,且对非线性、时变系统的控制效果较好[15-16].因此,针对此类新型挖掘机的特点,结合模糊控制和PID控制方法,设计了如图3所示的一种模糊-PID双模控制器.考虑到PID控制器在小范围内的调节效果是令人满意的,因此当系统偏差e小于某个阈值时,采用PID控制,以得到较高的稳态性能;当系统偏差e大于该阈值时,切换到模糊控制,从而加快系统响应速度.由于两种控制器是使用分段切换工作的方式,因此两者之间不会产生干扰.其中模糊控制器输入为偏差e和偏差变化ec,输出为控制量变化u,e,ec,u的模糊子集均取{NB,NM,NS,ZO,PS,PM,PB},再根据常规模糊控制器模糊规则设计的原则,可以得到如表1所示的模糊规则.控制器性能的设计目标为:在动态特性方面,最大超调量不超过20%,上升时间不超过0.025秒;在静态特性方面,稳态误差不超过2%.
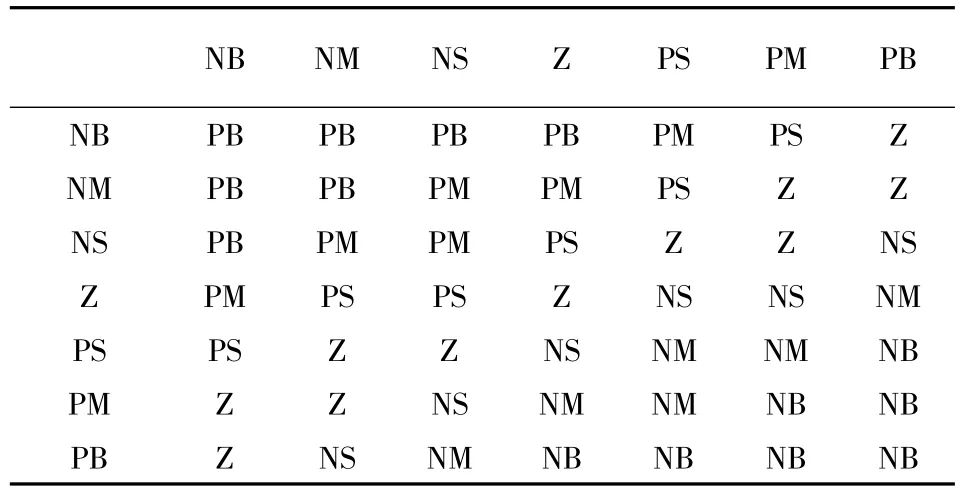
表1 u的模糊规则表Table 1 Fuzzy rules table of u
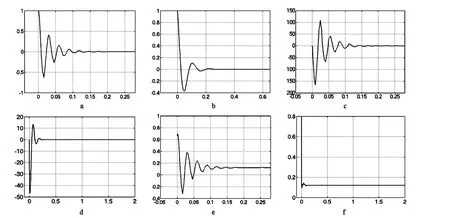
图4 响应曲线Fig.4 Response curves of the parameters
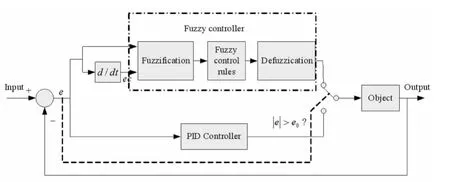
图3 模糊-PID双模控制器结构图Fig.3 Fuzzy-PID double model controller
3 仿真分析
模糊-PID双模控制器实际上是一种变结构控制器,它由一个模糊控制器和一个PID控制器组成.首先确定其输入偏差e,偏差变化ec和输出u的论域及隶属函数,同时选择合适的模糊规则和模糊推理方法.由传统PID控制器仿真可分别得到Z-N法整定参数和手动调整参数后变量e,ec,u随时间变化的曲线,如图4所示.其中,图4a表示ZN法e响应曲线,图4b表示手动调节e响应曲线,图4c和4d分别表示Z-N法和手动调节的ec响应曲线,图4e和4f为u响应曲线.取偏差e的论域为[-0.6,1],偏差变化ec的论域为[-15,6],输出u的论域为[-1,2],隶属度函数均取三角形函数如图5所示.其中图5a为e隶属度函数分布图,图5b表示ec隶属度函数分布图,图5c则表示u隶属度函数分布图.
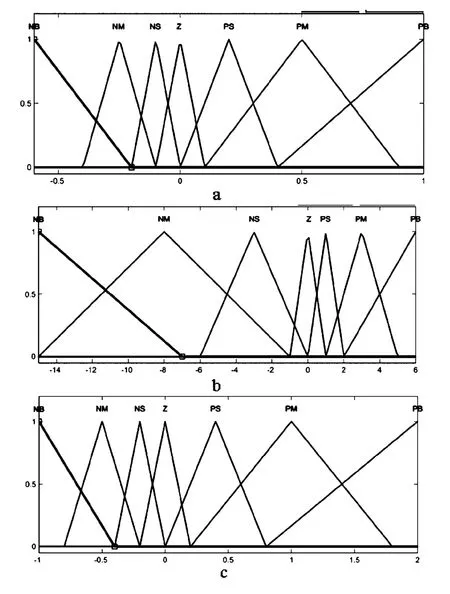
图5 隶属度函数分布图Fig.5 Membership functions of the parameters
进而可设计如表2所示的模糊规则,得到输出量u关于e和ec的变化规律,如图6所示.

表2 简化后u的模糊规则表Table 2 Fuzzy rules table of u after simplification
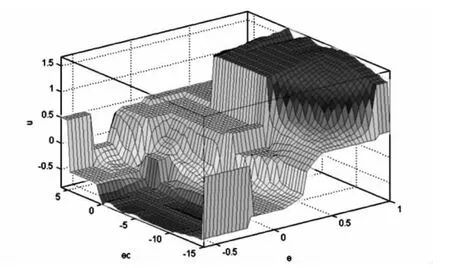
图6 输出量u变化规律Fig.6 The variation of output u
对模糊控制器进行仿真,输入比例因子Ke、Kec分别取1和0.1,输出比例因子Ku取0.4,则可得到单独使用模糊控制器时的系统单位阶跃响应变化规律,如图7所示.
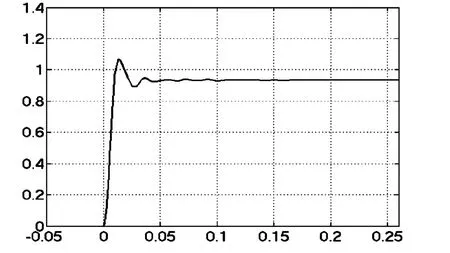
图7 模糊控制器阶跃响应曲线Fig.7 Step response curve of fuzzy controller
由图7可知,单独使用模糊控制器时,对比于PID控制器系统的超调量明显减小,响应时间显著缩短,但是系统出现了稳态误差,这是因为缺少了积分I的作用.

图8 模糊-PID双模控制器仿真电路Fig.8 Simulation circuit of fuzzy-PID double model controller
在以上分析基础上,将模糊控制器与PID控制器结合在一起,可设计如图8所示的模糊-PID双模控制器仿真电路,取阈值e0为0.3[17-18],即当偏差|e|>e0时,使用模糊控制器,当偏差|e|<e0时使用PID控制器.此时系统的单位阶跃响应曲线如图9所示.
从阶跃响应曲线可看出,在使用模糊-PID双模控制器时,系统的最大超调量为16.7%,调整时间为0.225秒,上升时间为0.019秒,稳态误差为0%,满足设计要求.
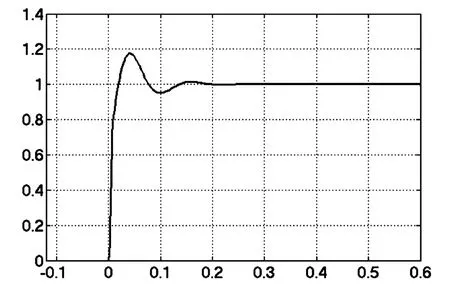
图9 模糊-PID双模控制器阶跃响应曲线Fig.9 Step response curve of fuzzy-PID double model controller
4 结论
针对新型可控挖掘机构的特点,以一种平面三自由度可控挖掘机构为例,运用拉格朗日方法建立了机构的刚体动力学模型,得到了各主动杆的系统广义力,进而针对其半闭环控制系统的控制策略进行研究,基于机构驱动元件-交流控制电机及其驱动器的数学模型,运用模糊算法设计了一种模糊-PID双模控制器,并与传统PID控制器进行了对比研究.结果表明:基于模糊算法的控制器在超调量,调节时间,上升时间和抗干扰能力等控制性能方面均强于PID控制器,满足系统的控制要求.
1 闫书文.机械式挖掘机设计.北京:机械工业出版社,1996(Yan S W.Design of mechanical excavators.Beijing:China Machine Press(in Chinese))
2 林贵瑜,连晋华.机械式挖掘机设计与发展的几个问题探讨.矿山机械,2006,34(12):52 ~54(Lin G Y,Lian J H.Discussion on several problems related to design and development of mechanical excavators.Mining&Processing Equipment,2006,34(12):52 ~54(in Chinese))
3 邹慧君,李瑞琴,郭为忠等.机构学10年来主要研究成果和发展展望.机械工程学报,2003,39(12):22~30(Zou H J,Li R Q,Guo W Z.Research trends and prospects of mechanisms in China in the past decade.Journal of Mechanical Engineering,2003,39(12):22 ~ 30(in Chinese))
4 周双林,邹慧君,姚燕安等.混合输入五杆机构构型的分析.上海交通大学学报,2001,35(7):1045 ~1048(Zhou S L,Zou H J,Yao Y A.Analysis of types of hybrid input five-bar mechanism.Journal of Shanghai Jiaotong U-niversity,2001,35(7):1045 ~1048(in Chinese))
5 张新华,张策,田汉民.精确实现成组轨迹的二自由度连杆机构逆运动学综合问题.机械设计,2001,10(10):9~12(Zhang X H,Zhang C,Tian H M.Inversekinematics synthesis problems of 2 DOF linkage achieving the group-tracks accurately.Machine Design,2001,10(10):9~12(in Chinese))
6 王汝贵,蔡敢为,李岩舟.可控连杆机构系统预定轨迹下的动态优化综合.中国机械工程,2008,19(22):2653~2656(Wang R G,Cai G W,Li Y Z.Dynamic Optimum Design of Controllable Linkage Mechanism under Given Trajectory.China Mechanical Engineering,2008,19(22):2653~2656(in Chinese))
7 Du R,Guo W Z.The design of a new metal forming press with controllable mechanism.ASME Journal of Mechanical Design,2003,125(3):582 ~592
8 李辉.混合驱动可控压力机的基础理论研究[博士学位论文].天津:天津大学,2003(Li H.The Preliminary Study on hybrid driven press[PhD Thesis].Tianjing:Tianjing University,2003(in Chinese))
9 Cai G W,Pan Y C,Wang H Z.Functional analysis based conceptual design of a type of novel mechanical excavator with controllable mechanism.Applied Mechanics and Materials,2012,143 -144:454 ~457
10 蔡敢为,潘宇晨.一种平面三自由度可控挖掘机构.中国,200910114447,2011-5-18(Cai G W,Pan Y C.A Planar 3-DOF Parallel controllable Excavator Mechanism.China,200910114447,2011.5.18(in Chinese))
11 Cai G W,Zhang Z,Pan Y C.Kinematics analysis and simulation of a new type of mechanical excavator with controllable mechanism.Advanced Materials Research,2011,201-203:220~224
12 张转.多自由度可控新型机械式挖掘机构的运动学和静力学研究[硕士学位论文].南宁:广西大学,2011(Zhang Z.Kinematic and statics study of a novel multi DOF mechanical excavator with controllable mechanism[Master Thesis].Nanning:Guangxi University,2011(in Chinese))
13 吴笃超.多自由度可控机构新型机械式挖掘机控制系统研究[硕士学位论文].南宁:广西大学,2011(Wu D C.Research on control system of a novel type of excavatorbased on multi DOF controllable mechanism[Master Thesis].Nanning:Guangxi University,2011(in Chinese))
14 郭庆鼎,王成元.交流伺服系统.北京:机械工业出版社,1994(Guo Q D,Wang C Y.Ac servo system.Beijing:China Machine Press,1994(in Chinese))
15 单伟伟,靳东明,梁艳.变论域自适应模糊控制器的CMOS模拟电路芯片实现.电子学报,2009,37(5):913~917.(Shan W W,Jin D M,Liang Y.Variable universe adaptive fuzzy logic controller cmos analog chip implementation.Acta Electronica Sinica,2009,37(5):913~917(in Chinese))
16 董海荣,高冰,宁滨.列车自动驾驶调速系统自适应模糊控制.动力学与控制学报,2010,8(1):87~91(Dong H R,Gao B,Ning B.Adaptive fuzzy control for speed adjustment of automatic train operation systems.Journal of Dynamics and Control,2010,8(1):87 ~ 91(in Chinese))
17 付刚.基于知识的智能PID控制器研究[硕士学位论文].哈尔滨:哈尔滨理工大学,2007(Fu G.Study on Intelligent PID Controller Based on Knowledge[Master Thesis].Harbin:Harbin University of Science and Technology,2007(in Chinese))
18 彭勇刚.模糊控制工程应用若干问题研究[博士学位论文].杭州:浙江大学,2008(Peng Y G.A Study on engineering application of fuzzy control[PhD Thesis].Hangzhou:Zhejiang University,2008(in Chinese))
*The project supported by the National Natural Science Foundation of China(51075077),Guangxi Key Laboratory of Manufacturing System & Advanced Manufacturing Technology Project(09-007-05S013)and Teams for Innovation in the Construction of Talent Highlands in Guangxi Institutions of Higher Learning
† Corresponding author E-mail:caiganwei@163.com
附录


等效转动惯量的具体表达式为:
DYNAMIC MODELING AND CONTROLLER DESIGN OF A PLANAR 3-D OF CONTROLLABLE EXCAVATING MECHANISM*
Pan Yuchen1,2Cai Ganwei2†Wu Duchao3Zhang Jinling2Gao Dezhong2
(1.College of Physics and Electronic Qinzhou University,Qinzhou535099,China)(2.College of Mechanical Engineering,Guangxi University,Nanning530004,China)(3.Guodian Science and Technology Research Institute,Nanjing210031,China)
By using Lagrangian methods,the rigid body dynamics model was established for a planar 3-DOF controllable excavating mechanism.Based on the system generalized forces of the three driven bars,the control strategy of the semi-closed loop control system was studied.A Fuzzy-PID dual-mode controller was introduced and analyzed by using fuzzy algorithm based on the mathematical model of mechanism driven components-AC servo motors.The simulation results indicate that the proposed controller has better performance in overshoot,adjusting time,rise time and anti-interference ability,which can satisfy the control requirements of the system.
multi degree-of-freedom controllable mechanism, excavator, dynamics, fuzzy-PID control
10 October 2012,
17 April 2013.
10.6052/1672-6553-2013-071
2012-10-10 收到第 1 稿,2013-04-17 收到修改稿.
*国家自然科学基金资助项目(51075077)、广西制造系统与先进制造技术重点实验室主任课题(09-007-05S013)、广西高校人才小高地建设创新团队资助计划
E-mail:caiganwei@163.com

