基于交流同步发电机电磁转矩的电动机加载方法研究
2014-09-15王连明
韩 冬,王连明
(东北师范大学应用电子技术研究所,吉林 长春 130024)
0 引言
目前,电机的加载装置从工作原理上主要分为机械加载器、磁粉加载器、电磁涡流加载器.但都相应存在一些缺点.
(1)机械加载器 常有高温现象,对电机损害较大,损耗较大.并且动态加载时,实时性较差[1-3].
(2)磁粉加载器 适用于低转速测试环境,在异步电动机不稳定区段不能提供稳定的测试,而且容易出现转矩不均或卡死等问题[4-6].
(3)电磁涡流加载器 存在调整比较困难,故障率较高,制动轴承经常无规律损坏,散热设备投资高等问题[7-8].
由于电动机加载设备存在种类少、结构复杂、消耗大、可移植性较差和适用范围窄等缺点.本文将介绍一种新的电动机加载方法,把交流同步发电机转子与电动机转子同轴连接,通过控制交流同步发电机的电磁转矩对其进行加载.
1 同步发电机电磁转矩原理
本文采用的是隐极性同步发电机,其对称的三相定子绕组分别是:A—X,B—Y和C—Z.图1即为单相同步发电机模型.
由于磁路中铁芯部分的磁阻非常小,忽略铁磁部分的磁阻Rm1,只考虑气隙部分的磁阻Rm2,那么气隙磁感应强度的大小为[9-10]

设气隙中任意一点P与转轴构成的平面跟参考平面MM′的夹角为α,转子以角速度ω沿逆时针方向转动,这样任意t时刻,气隙磁感应强度基波分量即主磁场表示式

式中B0m为基波分量的峰值,且

式中E0m为主磁感应电动势幅值,其表达式为

式中:L为转子长度;v为定子线圈的相对线速度;NC为定子每相绕组的匝数.
当发电机的磁极数为p时,感应电动势的频率f表达式变为


图1 三相隐极交流同步发电机模型
且v=ωr,r为转子半径,磁极所对应的气隙面积A=πrL.由(3)式可以将主磁感应电动势的有效值表达式写成

每相电枢电路的电压平衡方程为

其中相电流为

式中θ为功率角.
由于同步电抗和电枢电阻较小,因此忽略同步电抗Xt与电枢电阻R,则相电压U等于主磁感应电动势E0,即

交流同步发电机带上负载,则三相输出的总有功功率表达式

交流同步发电机的电磁转矩是发电机在输出有功功率时,电枢反施于转子的阻转矩,用TM表示.电磁转矩TM等于电磁功率(即总有功功率P)与同步角速度ω之比[10],即

由(6)式、(9—10)式及ω =2πf可得:
则电磁转矩TM表达式

系数K1与励磁绕组的结构、匝数、气隙面积、气息长度、空气磁导率及定子绕组匝数有关,即K1为与发电机构造相关的常数.系数K2与发电机运行状态有关,当发电机处于非过载运行状态时K2为常数.
综合以上分析可知,通过控制同步发电机的励磁电流,就可以改变同步发电机的电磁转矩.要使发电机正常工作需要有足够大的动力转矩克服发电机的电磁转矩,本文设计将交流同步发电机转子和电动机转子1∶1同轴连接,同步发电机的动力转矩便由电动机提供,实现对电动机加载的目的.
2 电动机的转矩检测
同步发电机的输入功率P1由电动机提供,同步发电机输入功率中减去空载损耗P0和电枢铜损耗pCu,便得到发电机输出电功率P2,

式中P2,pCu可由以下公式得出:

本系统采用的是三相异步电动机,其负载转矩为

式中:TLoad为电动机负载转矩;PLoad为电动机输出有功功率;nm为电动机的转速.
由(14—16)式可知,通过测得电动机的输出有功功率和电动机转速就能算出电动机的负载转矩TLoad.如果设定的同步发电机电磁转矩TM和得出的电动机的负载转矩TLoad相等便能够证明此加载方法有效.
3 加载系统设计
因三相交流同步发电机与单相交流同步发电机之间只存在相数的区别,所以选用单相交流同步发电机,并选用其负载为纯阻性负载,能减少功率角对同步发电机输出功率的影响.加载系统整体结构如图2所示.
电动机带动交流同步发电机启动后,上位机设定负载转矩值,经串行口将数据发给下位机,下位机控制可控直流电压源的输出电压,改变同步发电机的励磁电流,进而改变同步发电机的电磁转矩.同时下位机将测得的电动机负载转矩数据经串行口实时发送回上位机,并与设定的电动机负载转矩进行显示比对.系统各个模块的功能如下:
(1)可控直流电压源为交流同步发电机提供可控的励磁电流,它由可控变压器和交直流转换电路组成.可控变压器由自耦变压器和与之同轴相连的直流电动机组成.通过输入控制量控制直流电动机的转动,就可以改变自耦变压器次级线圈输出点的位置,改变变压器的输出电压.变压器的输出再经过全波整流和滤波,最终实现可控直流电压的输出.
(2)功率检测模块检测交流同步发电机的输出有功功率.模块由电能计量单元和电流电压互感器组成.电流电压互感器将大电流和大电压分别转换为弱电流和弱电压,用于电能计量单元的信号采集,同时也可实现电气的隔离,以提高系统的安全性[11-15].电能计量单元主要用于完成有功功率的测量,本系统采用美国模拟器件AD公司所生产的电能专用测量芯片ADE7758.该芯片能有效完成三相电系统中各相电参数的实时测量,并通过SPI接口与MCU完成实时通信.
(3)转速测量采用了基于红外传感器元件的脉冲发生器,其优点是成本低、构造简单.测速算法为M/T法,由单片机编程实现,保证了高速和低速运行时的测速精度.系统下位机采用了ATmega128单片机,上位机主要通过C++来实现负载转矩设定和负载转矩检测界面.系统上位机软件主要完成上位机系统初始化功能、配置下位机参数功能、接收下位机数据功能、波形绘制功能以及数据存储功能.功能实现流程如图3所示.
系统下位机部分主要由定时器模块、转速测量模块、ADE7758有功功率测量模块、串行口通信模块和控制模块构成.下位机对电磁转矩的控制原理如图4所示.
下位机根据上位机指令产生给定转矩,然后,通过可控直流电压源输出电压值改变同步发电机的励磁电流If,进而改变电动机负载转矩.同步发电机输出功率通过ADE7758检测,并由(14—16)式计算出实际负载转矩值,并与设定转矩进行比较,从而构成一个转矩的闭环控制系统,采用PID控制算法,保证输出转矩快速、准确地跟踪设定转矩.

图3 上位机功能实现流程

图4 下位机的控制原理
4 加载实验测试
系统所使用发电机额定功率为5kW的4极单相交流同步发电机,电动机额定功率为5.5kW,额定电流为11.6A,额定功率因数为0.84的4极三相交流异步电动机.搭建实际的基于交流同步发电机的电动机加载平台,如图5所示.
为验证加载效果,拟用两种方式对异步电动机进行加载:一种是对电动机进行恒定负载转矩加载;另外一种是对电动机进行变负载转矩加载.其中变转矩加载分别按正弦变化和锯齿波变化进行加载.
4.1 恒定负载转矩加载实验
保持同步发电机的纯阻性负载不变,上位机设定恒定负载转矩,经图4控制流程对电动机进行加载,同时把检测到的电动机负载转矩通过串口发给上位机,上位机描绘加载转矩设定值与电动机负载转矩值的波形图,如图6所示.其中虚线是设定的加载转矩,实线是测得的电动机输出转矩.
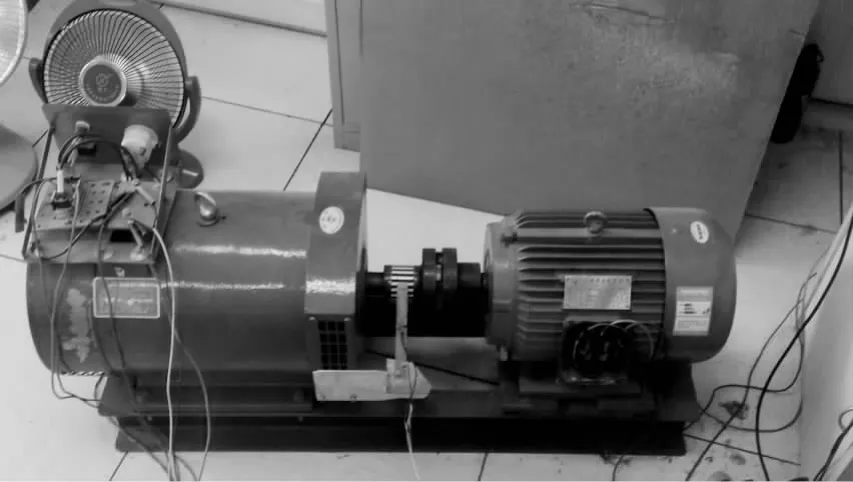
图5 加载装置实物图
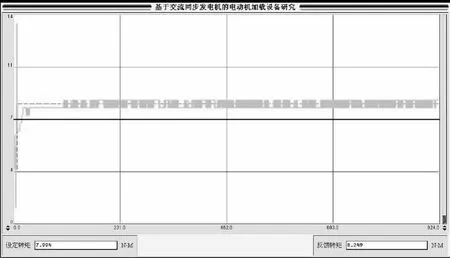
图6 恒定负载转矩实验结果
通过FLUKE 43B型电能质量分析仪测量电动机消耗的有功功率,并利用(16)式得到实际的电动机负载转矩值(见表1).
由表1可见:控制交流同步发电机的励磁电流,可以保持电动机的负载转矩不变;实际电动机负载转矩值与设定的负载转矩值基本相等,此情况下的加载精度为5.5%.

表1 恒定负载转矩实验结果 N·m
4.2 变负载转矩加载实验
4.2.1 负载正弦变化加载实验
保持同步发电机的纯阻性负载不变,上位机设定负载转矩按正弦规律变化,经图4控制流程对电动机进行加载,同时把检测到的电动机负载转矩通过串口发给上位机,上位机描绘加载转矩设定值与电动机负载转矩值的波形见图7,其中虚线是设定的加载转矩,实线是测得的电动机输出转矩.实际得到的电动机负载转矩值经Matlab描绘结果,如图8所示.
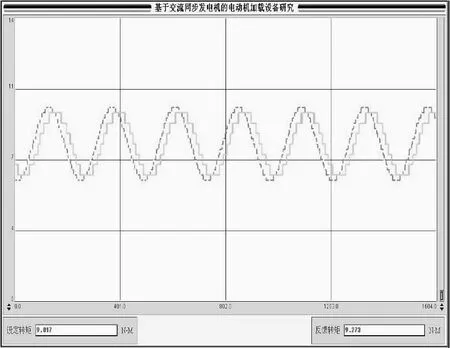
图7 正弦加载实验结果

图8 正弦变化负载转矩实验FLUKE电能表输出结果
4.2.2 负载锯齿波变化加载实验
如正弦加载操作一样,设定负载转矩按照锯齿波规律改变,其结果如图9所示.实际得到的电动机负载转矩值经Matlab描绘结果如图10所示.

图9 锯齿波加载实验结果

图10 锯齿波变化负载转矩实验FLUKE电能表输出结果
由图10可见:控制交流同步发电机的励磁电流,可以使电动机的负载转矩变化;实际的负载转矩变化趋势和设定的负载转矩变化趋势相同,此情况下的加载精度为8%.
5 结论
综上所述,通过控制交流同步发电机的励磁电流可以改变交流同步发电机的电磁转矩进而改变电动机的负载转矩,能够实现对电动机加载的目的.此项加载设计可方便地用于模拟实际工况时的各种实际负载的变化规律,从而实现模拟加载.在本文设计中,通过改变连接器的机械结构就能够实现对多种电动机的加载测试.因此,本文加载方法是一种具有可移植性好、占用空间小、造低价、控制灵活、稳固耐用等特点的新型加载方法.
[1]MORAR A.Considerations concerning the loading of small power electric motors[J].Acta Electrotehnica,2003,44(2):112-116.
[2]NASH J N.Direct torque control.Inductionmotor vector control without an encoder[J].IEEE Transactions Ind.,1997,33(2):333-341.
[3]JIN T D,COIT D W.Variance of system reliability estimates with arbitrarily repeated components[J].IEEE Transactions on Reliability,2001,50(4):409-412.
[4]MIKHAEIL-BOULES N.Design analysis of electromagnetic particle clutch[C].IEEE Proceedings of the 29th IAS Annual Meeting.Warren:General Motors,1994:357-360.
[5]王力,钱林方,高强,等.磁粉制动器的建模与辨识研究[J].电气自动化,2010,35(5):55-58.
[6]任国海,陈琢,杜鹏英,等.磁粉制动器对异步电动机机械特性的测量[J].电机与控制学报,2006,10(3):275-277.
[7]NOVAK P,EKELUND T,JOVIK I,et al.Modeling and control of variable-speed wind-turbine drive-system dynamics[J].IEEE Control Systems Magazine,1995,15(4):28-38.
[8]QIAN M,KACHROO P.Modeling and control of electromagnetic brakes for enhanced braking capabilities for automated highway systems[J].IEEE Conference on Intelligent Transportation Systems,1997:391-396.
[9]CHAPMAN S J.Electric machinery fundamentals[M].USA:McGraw-Hill,Inc,2004:166-226.
[10]郭木森.电工学[M].北京:高等教育出版社,2001:373-413.
[11]HU YUAN HANG,YU AN NING,WANG LIAN MING.A novel loading method for electric motors using AC synchronous generators[C]//Proceeding of the 2012International Conference on Computer Science and Electronic Engineering,San Francisco:IAENG,2012:406-410.
[12]CHEN KEXING,WANG GANG.Development and research of torque transducers[J].Aviation Metrology & Measurement Technology,2003,23(6):5-6.
[13]JANG SEOK-MYEONG,LEE SUNG-HO,JEONG SANG-SUB.Characteristic analysis of eddy-current brake system using the linear halbach array[J].IEEE Transactions on Magnetics,2002,38(5):2994-2996.
[14]GYUGYI L.Unified power-flow control concept for flexible AC transmission systems [J].IEEE Proceedings Part C,Generation,Transmission,and Distribution,1992,139(4):323-331.
[15]BUSO S,MALESANI L,MATTACELLI P.Comparison of current control techniques for active filter applications[J].IEEE Transactions on Industrial Electronics,1998,45(5):722-729.
