新型球式稳定平台内框架的模态分析与优化
2014-09-13孙路伟武秀东吕琼莹海智渊
孙路伟,武秀东,吕琼莹,海智渊
(长春理工大学机电工程学院,吉林长春130022)
0 引 言
稳定平台作为惯性测量与跟踪装置,被广泛应用于各种无人机、舰艇以及其它飞行器中,它是集光、机、电为一体的、保持光电设备(EO)的视轴(LOS)稳定的复杂精密设备,它的正常与否直接关系到测量与跟踪任务成败[1-2]。而平台系统的实际工作环境处于高能量、宽频带的随机激励条件下,结构系统的动态响应与静态响应相差很大,如果单纯采用静态分析的方法进行结构设计,将难以满足恶劣环境对稳定平台结构系统的要求。对于光电跟踪平台而言,在方位、俯仰方向上,载体的振动将会降低光电传感器的精度,导致采集图像模糊更严重的将会影响目标的捕捉,最终导致跟踪任务的失败[3-5]。对平台台体组件进行有限元模态分析,以确定其固有频率和振型,从而避免系统工作时发生共振和出现有害振型,是平台结构设计中不可或缺的过程[6-7]。
本研究通过对新型球式稳定平台进行有限元模态分析,找出新型球式稳定平台内框架组件的薄弱环节,与ANSYSWorkbench 分析结果相比较,以证明所建立的有限元模型以及各项分析的正确性,为后续的新型球式稳定平台设计与改进提供重要的参考数据。
1 新型球式稳定平台结构有限元模型的建立
1.1 新型球式稳定平台结构模型的建立
本研究所设计的新型两轴球式稳定平台用于装载光电跟踪CCD 相机和激光测距仪。该设计的球式稳定平台依旧延续经典概念中的方位与俯仰运动机构。方位转动能够实现±160 °转动,俯仰运动能实现±45 °转动。本研究利用三维软件Pro/E 设计出新型两轴球式稳定平台的三维模型,其中球式稳定平台内框架的三维模型如图1 所示。
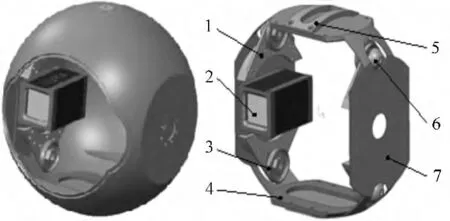
图1 球形稳定平台及内框架模型
1.2 新型球式稳定平台内框架模型的简化
对球式稳定平台进行有限元分析时,在组件本身强度、刚度和计算精度影响不大的前提下[8],为了提高计算速度,应当对球式稳定平台内框架作适当的简化。通过理论分析,影响球式稳定平台动力学的主要因素是内框架组件的转动惯量,因此没有必要画出内框架组件的每一个零件,需要保证球式稳定平台内框架转动惯量与实物的转动惯量一致,同时也要保证整体的质量中心和分布与简化前保持一致。这样不但简化了模型结构,尽量减小了简化模型分析结果与真实值的误差,而且更加有利于在ANSYSWorkbench 的分析计算,节省运算时间。
模型简化如下:
(1)对于球式稳定平台的内框组件结构中半径小于2mm 的孔,进行忽略,认为孔是实的,做填充处理。
(2)把球式稳定平台的内框组件结构中半径小于2mm 倒角和倒圆去掉。
简化处理后,新型球式稳定平台内框架模型简化图如图2 所示。
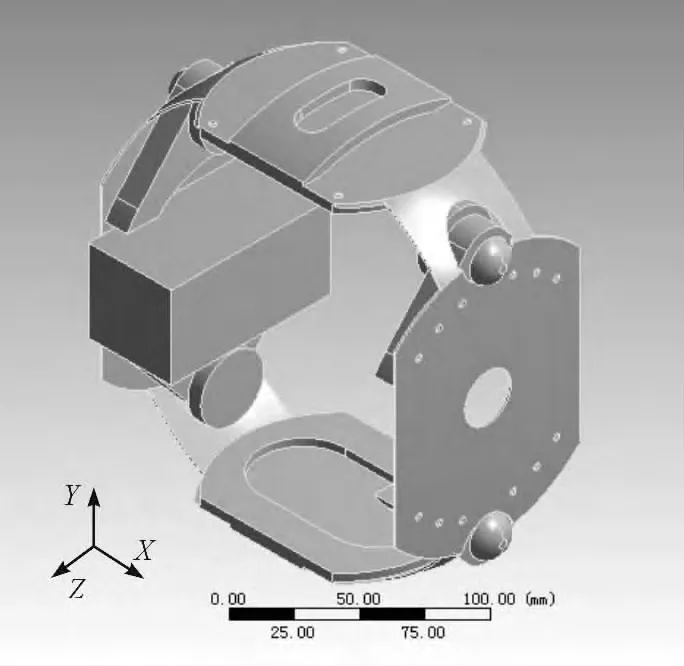
图2 新型球式稳定平台内框架模型简化图
1.3 零件的材料属性
在有限元模型中,为了减轻自身重量,内框架选用铝合金ZL107,为使分析更符合实际,所有轴承采用轴承钢GCr15,驱动机构根据实际情况,选用钢的材料特性,根据激光测距仪实际整体质量折算出当量材料参数,简化换算后,要求与实物的转动惯量相同,具体材料参数如表1 所示。
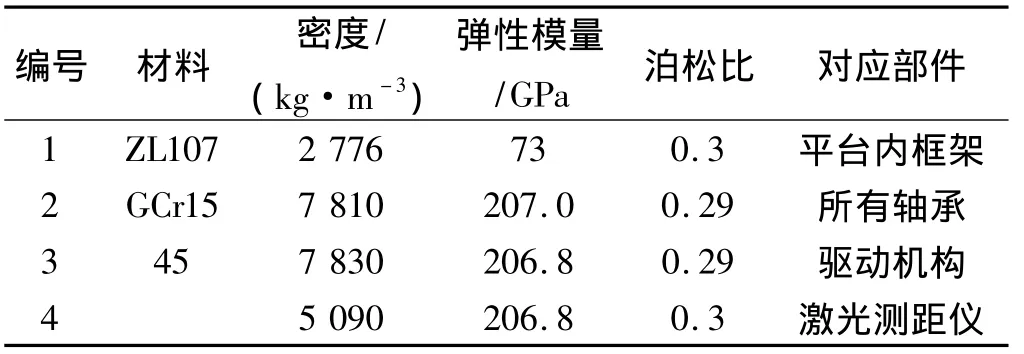
表1 所选结构材料相应参数
1.4 边界条件的设定
在稳定平台中,轴承起到了十分重要的连接作用,因此轴承的边界条件设置的好坏,直接影响到整个稳定平台系统的工作精度和可靠性。在ANSYSWorkbench的边界设置时,本研究将4 个与驱动球配合的轴承的外圈与驱动球固定架胶结在一起,从而避免零部件之间相对滑动,影响计算误差。为了节省计算时间,本研究将轴承内圈与滚珠、保持架定义为绑定接触,轴承内圈与驱动球定义为理想的无摩擦接触的转动副。4 个驱动球与外球壳之间定义摩擦系数为0.12 的摩擦接触。
2 模态计算及结果分析
2.1 模态分析
自由振动并忽略阻尼时,其方程为:

式中:[M]—质量矩阵;[K]—刚度矩阵;{u }—加速度向量;{u}—位移向量。
当发生谐振动时,即:

式中:ω—结构振动的固有频率。将式(2)代入式(1),得:

故对于一个结构的模态分析,其固有圆周频率ωi和振型φi都能从上面矩形方程式中得到。这个方程的根是ω2i,即特征值;i 的范围从1 到自由度的数目,相应的向量是{u}i,即特征向量。特征值的平方根是ωi,它就是结构的自然圆频率(单位为rad/s),进而可得出自然频率fi=ωi/2π。特征向量{u}i表示振型,即假定结构以频率fi振动时的形状。
2.2 模态计算
由于一般低阶模态响应对结构整体响应贡献比较大[9],此处仅给出球式稳定平台内框架的前五阶固有频率值,通过利用ANSYSWorkbench[10]软件对模型分析计算,得出其具体数值如表2 所示。

表2 内框架前五阶固有频率
球式稳定平台中的测距仪为标准件,而本研究最为关心的是内框架上的变形情况。因为台体上的测距仪安装面的变形都影响其精度和可靠性,为了较好地观察安装面的变形,而列出的球式稳定平台内框架具体振型云图,如图3 所示。
2.3 新型球式稳定平台模态分析求解结果分析
(1)从内框架的前五阶振型云图可以看出:整个内框架的最大变形量主要发生在内框架及简化的激光测距仪上,其他部位变形量较小。第1 阶表示为Y 方向的纵弯曲,内框架的下半部分变形较大;第2 阶表示

图3 有限元网格划分及前五阶固有频率振型云图
为沿X 方向的摆动,内框架驱动球附件变形较大;第3阶表示为X 方向的扭转模态,激光测距仪镜头部位出现较大弯曲;第4 阶表示为Y 向的垂直弯曲,激光测距仪纵向出现较大形变;第5 阶表示为±Z 向的纵向弯曲,内框架连接片出现轻微形变;在图3 中已经标示出来。
(2)从图3 中可以看出,整个内框架的最大形变基本都发生在激光测距仪上,这一形变将影响整个测量的精确度,尤其是测量装置的安装精度和可靠性,所以尽量避免在该频率下的共振和有害振型所产生的不利影响。
2.4 修改建议
根据第3、4 阶模态分析结果,结合结构动力调整的基本原理,对于结构进行动力调整可通过增加内框架激光测距仪安装板的厚度,增加其安装板的刚度,相对应地提高激光测距仪的刚度,从而减小激光测距仪的误差。同时通过在内框架上添加质量块,达到转移重心的目的,从而达到最好的动态性能。但究竟在哪个位置以及调整量是多少使效果最佳,需要多次实验才能获得[11]。
3 结束语
由于本研究采用球式稳定平台,从而可以省去传统稳定平台中的关键部件—万向节,这样可以减轻平台自身重量,这样内框架可以在球壳内部的分辨率为9.55 ×10-3 °,转动的角速度和角加速度分别为212 °/s 和1 740 °/s2 的俯仰与方位运动。
本研究通过借助有限元分析软件,利用计算机的分析计算,根据分析结果对所研究的新型球式稳定平台内框架进行了动力修改,这不仅可以使结构件获得较好的动态性能,而且能大大缩短平台的研制周期,节省研制费用。
[1]高 准,屈孝池.基于有限元法的惯性平台外框架组件失稳倒台动力学分析[J].机械制造,2012,51(2):57-59.
[2]薛 珊,曹国华,杨浦良,等.某光电雷达稳定平台关键部件转板的动态特性分析[J].应用光学,2011,32(6):1067-1071.
[3]许德新.无人机光电载荷视轴稳定技术研究[D].哈尔滨:哈尔滨工程大学自动化学院,2011.
[4]薛 珊,曹国华,宋玉龙,等.某型内转子光电雷达稳定平台的模态分析与优化[J].光学技术,2011,37(5):562.
[5]薛 珊,曹国华,吕琼莹,等.新型外转子雷达稳定平台的动态特性分析与优化[J].机械设计与制造,2012(4):124-126.
[6]钟万登,催佩勇.液浮惯性器件[M].北京:宇航出版社,1987.
[7]许德新.机载光电跟踪陀螺稳定技术[D].哈尔滨:哈尔滨工程大学自动化学院,2007.
[8]杨朋军,靳长权.惯性平台台体组件的有限元模态分析[J].机械与电子,2004(4):15-18.
[9]MOKBEL H F,Design optimization of the inner gimbal for dual axis inertially stabilized platform using finite element modal analysis[J].International Journal of M odern Engineering Research,2012,2(2):239-244
[10]马静静,胥光申.重要电子设备机箱动态特性分析与试验[J].机械,2013,40(6):26-29.
[11]白化同,郭继忠.模态分析理论与实验[M].北京:北京理工大学出版社,2001.
