输油管道泄漏监控系统的升级分析与设计
2014-09-10李志猛戚甫锐张茜
李志猛,戚甫锐,张茜
(中石化管道储运公司 潍坊输油处, 山东 潍坊 261021)
1 管道泄漏监控系统升级的必要性
2008年,中石化管道储运公司潍坊输油处启动了东临、东黄线检漏系统升级改造工程。在此之前,潍坊处检漏系统对于小信号的泄漏判断存在误报警、定位距离偏大的现象。此外,原检漏系统的数据传输是通过Modem电话拨号的方式将子站的压力数据传输给调度室中心站进行检漏定位。由于电话通信线路不稳定,造成通信质量不好时存在数据丢包的现象,影响管线运行压力的分析。同时随着输油管线的老化以及反打孔盗油的任务的严峻性,管道检漏监控系统对小信号的泄漏判断提出了更高的要求,因而对检漏系统升级改造势在必行。
2 管道泄漏监控系统
2.1 泄漏监控系统架构
管道泄漏监控系统软件采用LabVIEW虚拟仪器软件开发平台,根据LabVIEW平台上构造复杂多任务并行应用程序的技术,针对平台的多任务调度,尽量地使用动态调用,优化了程序结构,使程序运行更加平稳、可靠;并且根据模块化软件设计方法,使界面更友好、操作简单方便。管道泄漏系统的中心站设在处调度室,并且中心站配置2台计算机分别与各个子站进行数据通信,此2台计算机互为备份,完成相同的监控功能。管线上各子站的数据采集装置不断采集管道的压力等工况信息,初步判断是否有泄漏信号发生,然后将采集的信息通过网络传输到中心站的计算机进行处理和分析,判断管线上是否有泄漏发生。当发生泄漏事故时,将发出声光报警信号,并对泄漏点定位,给出漏点位置信息。整个管道泄漏监控系统由子站、中心站、通信三部分组成,全部采用高性能的Dell工作站。
2.2 采用高精度数据卡提高采样速率
为了提高泄漏检测的灵敏度和定位精度,压力信号采样频率要达到100Hz以上。各子站进出站压力变送器完成压力信号的采集,4~20mA电流信号经防雷模块接入各站的SCADA系统,同时将电流信号串联接入到管道泄漏信号调理器并转化为-10~10V的电压信号,调理器对信号进行滤波后接入到基于国际工业标准设计的高速数据采集卡,数据采集卡将原来的12位A/D转换的PCI-6023E更换为16位A/D转换的PCI-6220,具有精度高、可靠性强等优点,采样速率可到200Kbit/s,提高了泄漏检测的灵敏度和定位精度。
2.3 采用TCP/IP和FTP并行工作方式
为了对管道进行实时监控,必须实时获得管线各站的管道运行数据,因此通畅的数据通信是必不可少的。通信方式将原来的Modem拨号方式改为以太网方式,采用TCP/IP协议接收子站传输的数据,并且为了更好地实时监控,中心站服务器采用了双机热备技术。此外,为了避免网络通信暂时中断造成压力采集数据中心站丢失数据包的现象,检漏系统采用了FTP程序和实时TCP/IP通信并行工作的方式。子站的压力数据在往中心站实时传输的同时,在本地电脑建立缓存区以记录采集压力数据。子站的数据每隔1h就生成1个文件表,中心站每隔1h向子站校对数据表。如果中心站校对之后发现缺失子站的数据表,这时就启动FTP程序,子站向中心站发送数据表,这样就解决了网络中断及中心站掉数据包的问题,更好地便于压力信号的分析。
3 卡尔曼滤波和序贯概率比检验算法的实现
3.1 基于LabVIEW的卡尔曼滤波算法的实现
卡尔曼滤波器是最佳的递归估计器,其显著特点是用状态空间概念来描述其数学公式,通过递归计算其解,不要求保存过去的测量数据。当新数据测得以后,根据新的数据和前一时刻的状态估计值,借助于系统本身的状态转移方程(动态方程),按照递推公式,即可算出新的状态估计值。
根据管道上实时采集的压力信号序列的特点以及标量卡尔曼滤波的算法,建立如下的模型:
s(k)=s(k-1)+w(k-1)
(1)
x(k)=s(k)+n(k)
(2)
式中:s(k)——状态信号序列;n(k)——白噪声序列,常称为测量噪声;w(k)——零均值的白噪声序列,常称为动态噪声或系统噪声;x(k)——观测序列。
那么该模型的卡尔曼递推算法如下:

(3)

(4)
滤波误差方差:

(5)
滤波方程:
Ŝ(k)=Ŝ(k-1)+b(k)[x(k)-Ŝ(k-1)]
(6)
新息:e(k)=x(k)-Ŝ(k-1)
(7)
(8)
设初始值:Ŝ(0)=E[s(k)],p(0)=0
卡尔曼递推算法流程如图1所示。
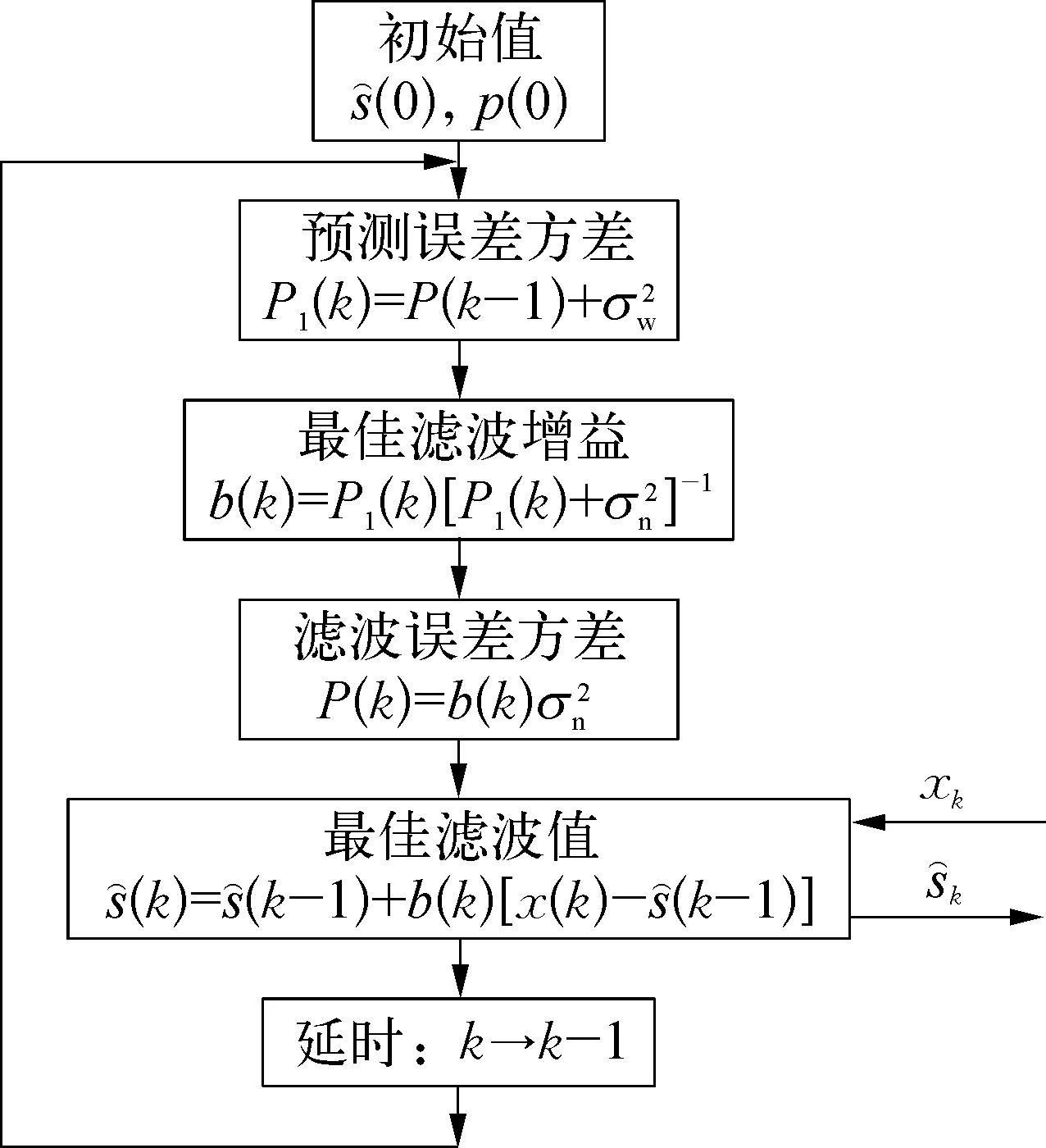
图1 卡尔曼递推算法流程示意
卡尔曼滤波处理的输入是待分析的压力信号序列,由式(7)可知,卡尔曼滤波处理输出是归一化的新息序列,该新息序列能够突出压力波形的拐点,图2是压力变送器输出的待分析的压力信号序列;图3是压力波形经过卡尔曼滤波器处理后的波形,可以看出信号的噪声减小许多,而且反映出原压力波形的变化趋势;图4是各自对应的新息波形,可以看到原压力信号波形平缓的地方,新息的值在零附近,原压力信号波形突变的拐点位置,其出现极值点,也就是说压力信号波形的拐点被明显地突出出来了。这样,只需增加简单的判断算法就可准确定出相应拐点的位置,分别得到管道上下游的压力信号波形拐点的位置后,二者做差就可得到负压波法中的关键参数——时间差,算出泄漏发生地点。由于该方法对拐点比较敏感,因而灵敏度较高,定位较准,可以有效地提高负压波法中时间差的准确度,从而降低误报警率。
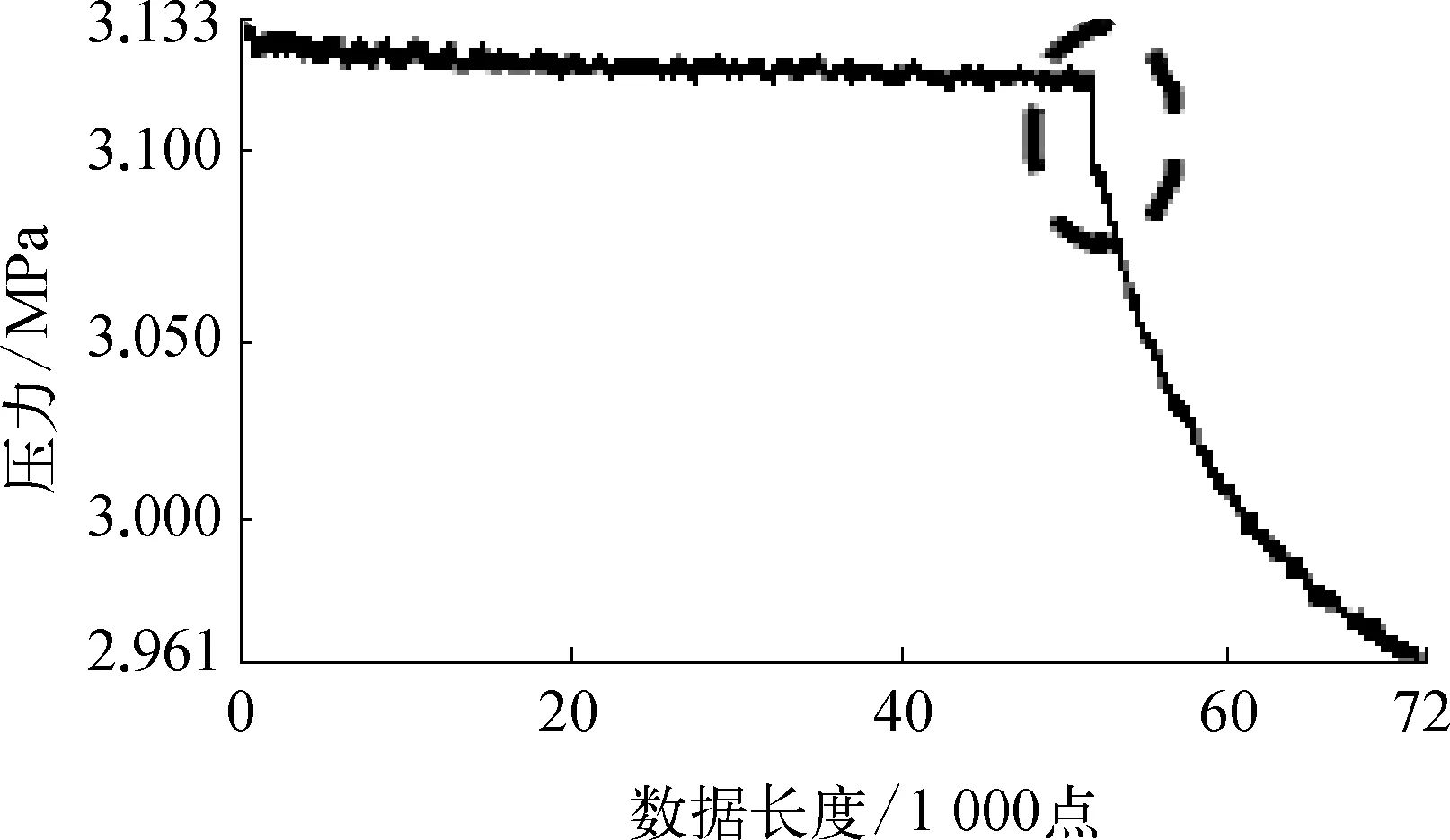
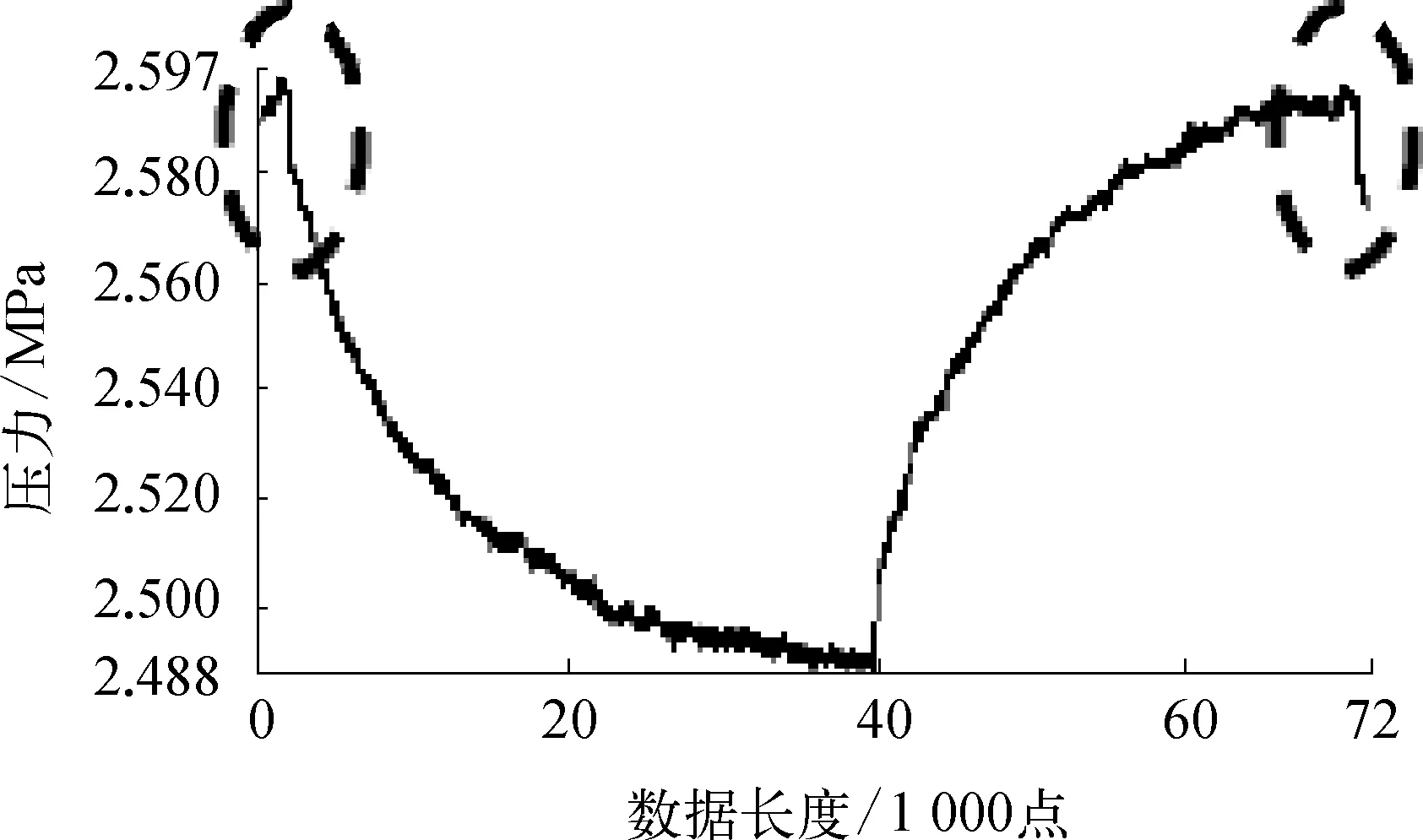
图2 压力信号序列波形
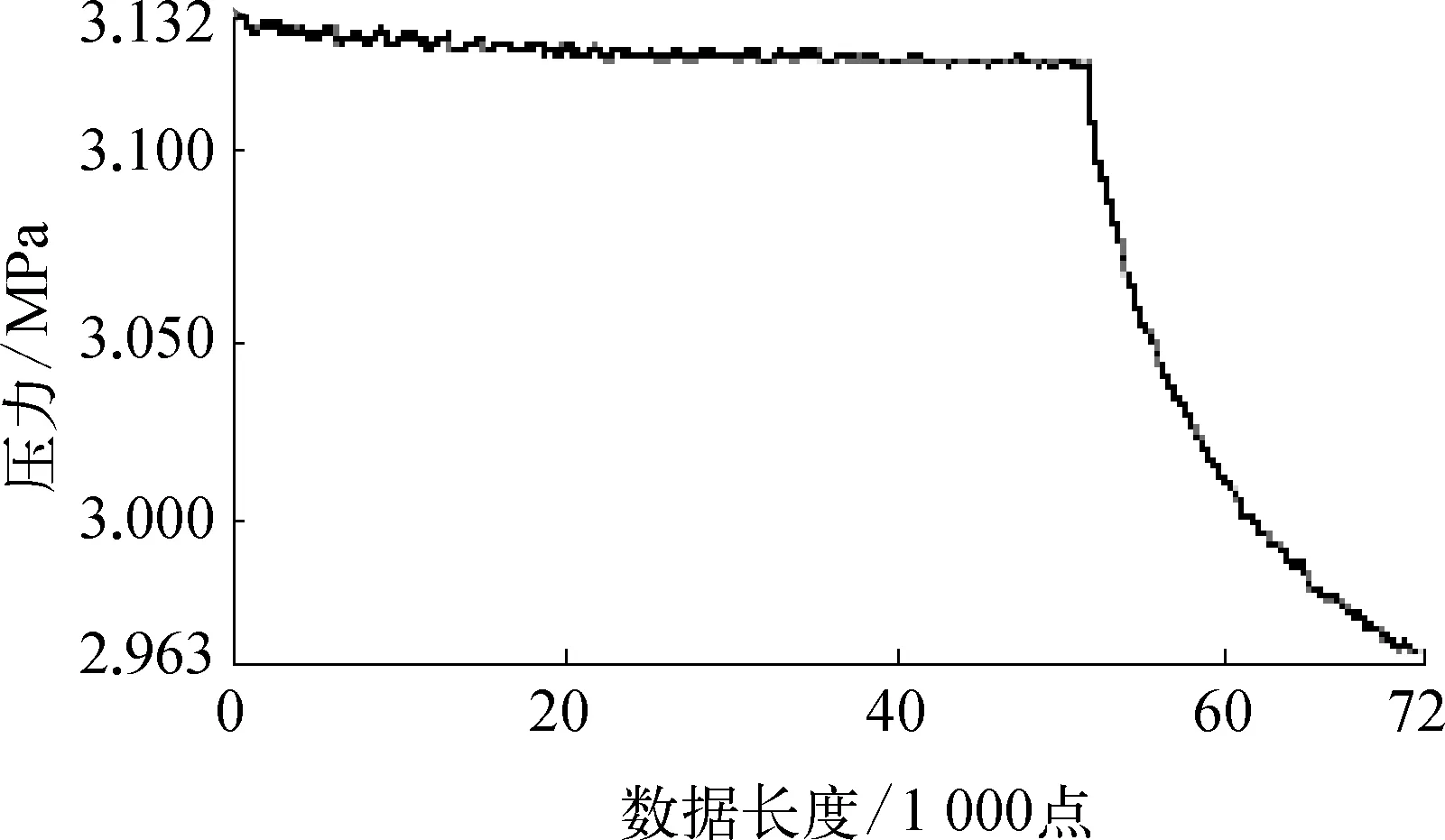
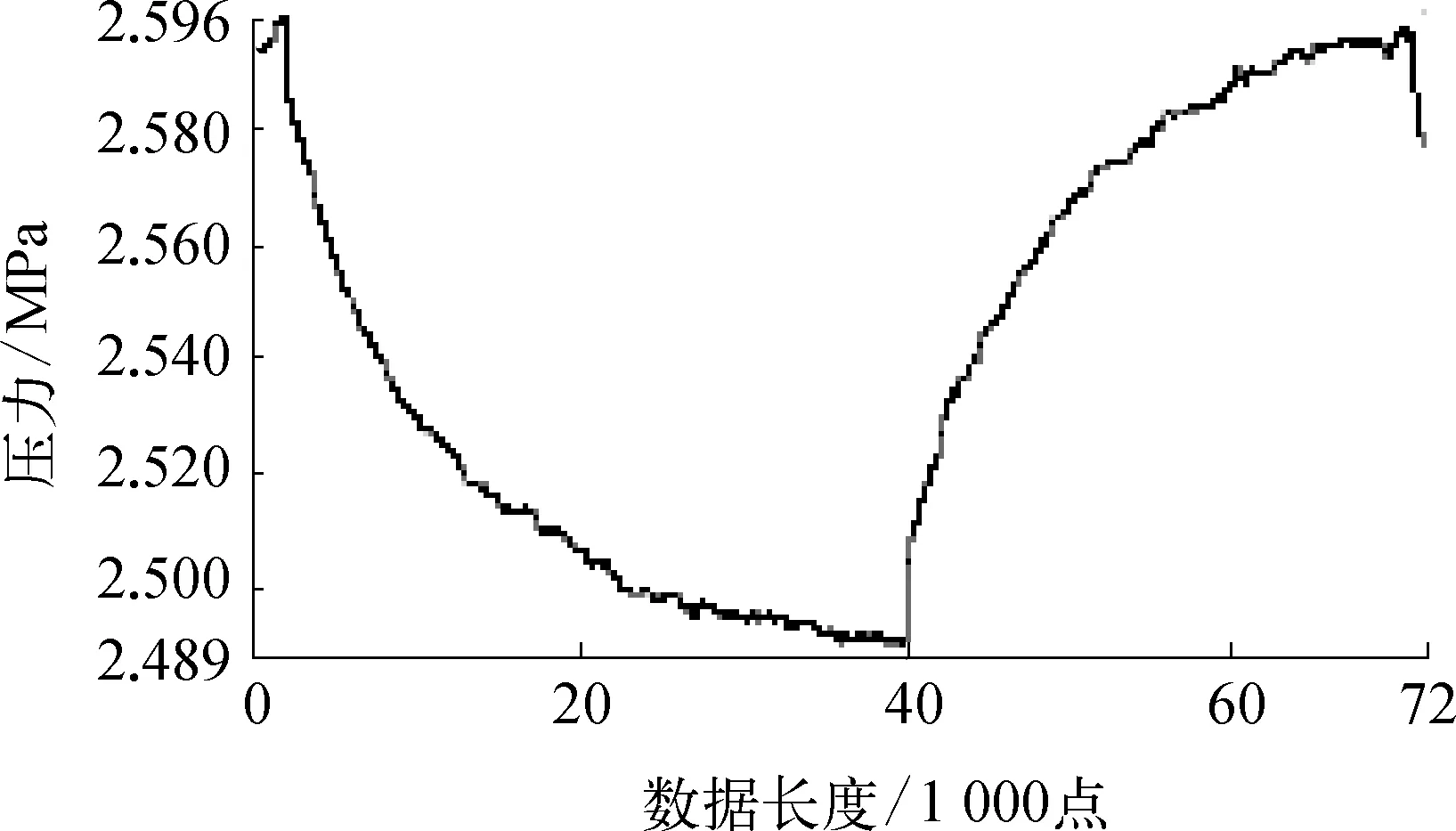
图3 卡尔曼滤波处理后的波形
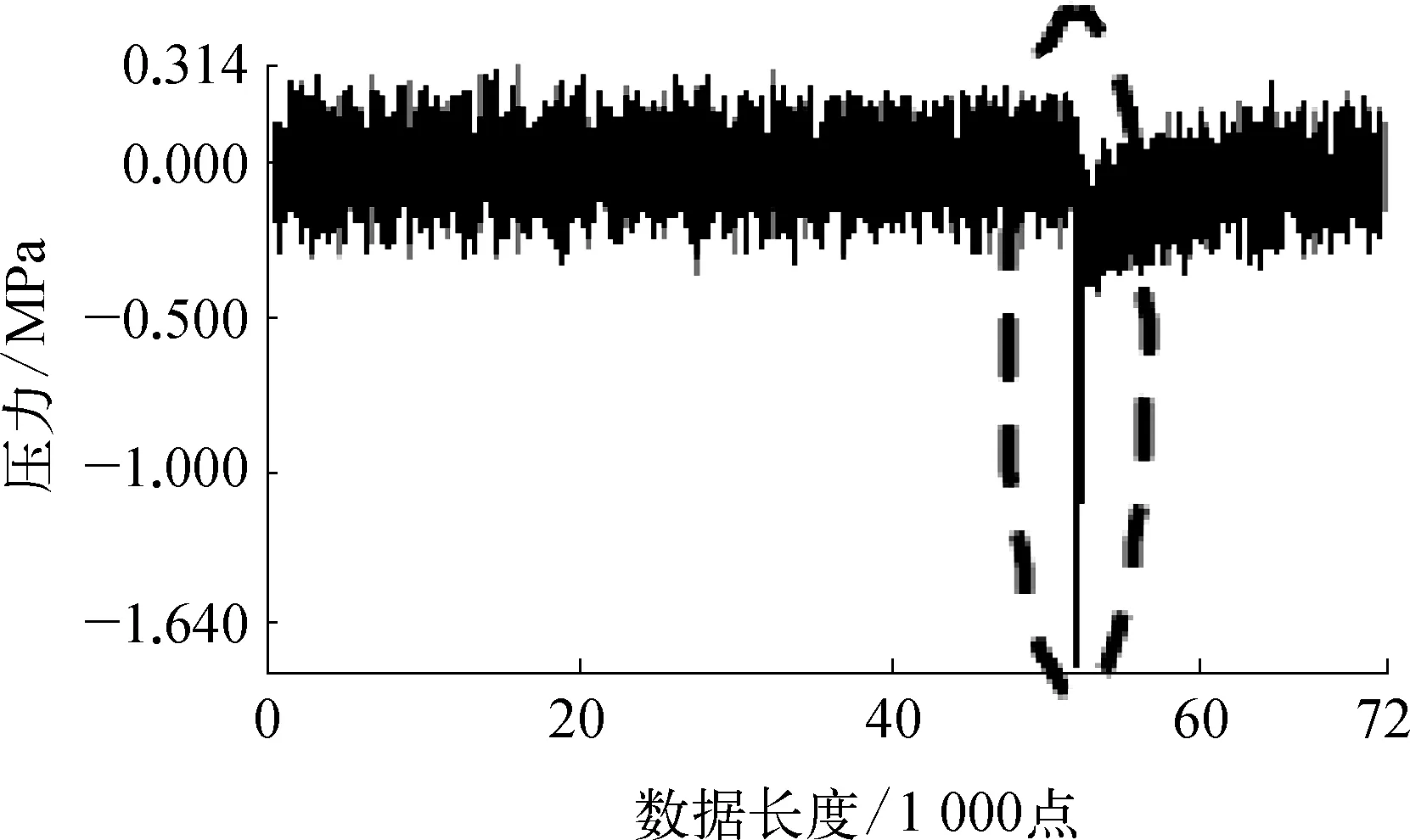
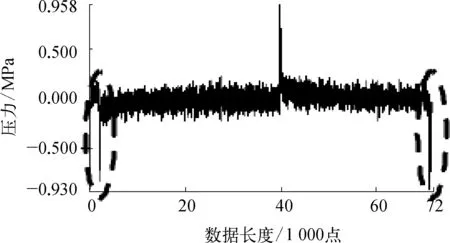
图4 归一化的新息波形
3.2 基于LabVIEW的序贯概率比检验的实现
序贯概率比检验(SPRT)是一种统计决策方法。在序贯概率比检验中,参数空间被分成三个区域:接受域(接受H0)、拒绝域(拒绝H0)与不确定区域,三个区域由上下两个边界(A,B)来划分,如图5所示。

图5 序贯概率比检验方法示意
当检验参数大于上边界A时,则立即做出决定,拒绝H0;当检验参数小于下边界B时,亦可以立即做出决定,接受H0;当检验参数介于A~B时,不能立即做出决定,应该继续利用新的数据计算检验参数,再进行判断。
将压力信号经卡尔曼滤波算法处理后,其归一化的新息序列作为序贯概率比检验的输入序列,以满足序贯概率比检验的要求。输油管道压力信号的序贯概率比检验参数λ(n)通常为
λ(n)=λ(n-1)+Δμ(Xn-Δμ/2)
(9)
式中:Δμ——均值的变化量。
SPRT的上下边界为
A=ln[(1-β)/α]
(10)
B=ln((1-α)/β)
(11)
式中:α,β——允许的误报警率和漏报警率。
当检验参数超过下边界时,即可做出未发生泄漏判断,然后检验参数λ(n)的值重新从零开始计算;当检验参数超出上边界时,做出泄漏的判断,并调用相应的判断程序给出泄漏时刻,检验参数λ(n)同样重新从零开始计算。上述的判断步骤是根据序贯概率比检验的原理设计的,只有当检验参数未超过上下边界时无法做出是否泄漏的判断,继续计算λ(n),一旦其超出边界,则做出判断,并将检验参数做归零处理,重新开始计算。压力信号序列经过卡尔曼滤波和归一化等处理后,检验参数λ(n)的计算见式(9),由该式可以看出参数Δμ的选择对λ(n)的影响较大。当Δμ值较大时,容易引起误报警;当Δμ值较小时,又会漏报警,两者都是不可取的。因此,选择参数Δμ的原则就是尽量使误报警率和漏报警率最低,一般均值偏差Δμ取值范围为0.10~0.15。
4 结术语
该检漏系统通过更换高频数据采集卡、采用以太网FTP程序和实时TCP/IP通信并行工作的通信方式,并且以解决负压波检测管道泄漏方法的关键参数——时间差的获得为基础,提出了卡尔曼滤波和序贯概率比检验的算法,实现了提高管道泄漏监控系统的实时性和准确性的目的,最大定位距离不超过0.4km,并且对于小泄漏信号的检漏率达到了90%以上。
参考文献:
[1]李晓维.虚拟仪器技术分析[J].电子测量与仪器学报,1996,10(03):9-13.
[2]王立宁,李健,靳世久.热输原油管道瞬态压力波法泄漏点定位研究[J].石油学报,2000,21(04):93-96.
[3]朱爱华.卡尔曼滤波和序贯概率比检验在管道泄漏监测中的应用[D].天津:天津大学,2006:19-39.
[4]贾沛章,朱征桃.最优估计及其应用[M].北京:科学出版社,1984:33-45.
[5]许树声.信号检测与估计[M].北京:国防工业出版社,1985:157-162.
[6]向敬成.信号检测与估计[M].北京:电子工业出版社,1994:171-177.
[7]朱爱华,靳世久,曾周末.卡尔曼滤波在管道泄漏检测中的应用[J].化工自动化及仪表,2005,32(05):57-60.
[8]陈春刚,王毅,杨振坤.利用假设检验理论进行管道泄漏检测[J].石油化工设备,2004,33(02):46-49.
[9]蔡正敏,彭飞,易发新,等.长输管道泄漏故障诊断方法的研究[J].应用力学学报,2002,19(02):38-43.
[10]陈春刚,王毅,杨振坤.利用假设检验理论进行管道泄漏检测[J].石油化工设备,2004,33(02):46-49.
[11]高炳坤,贾莹.基于声波的天然气管道泄漏检测与定位[J].化工自动化及仪表,2013,40(03): 305-308.
[12]尹斌,陈健飞,盛华.基于风险的油田油气集输管线维护决策优化方法[J].化工设备与管道,2012,49(02):55-58.