双足跳跃机器人的适应性CPG运动控制
2014-09-06,,,,
,, ,,
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
双足跳跃机器人的适应性CPG运动控制
王婷婷,査富生,郭伟,李满天,孙立宁
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
0 引言
生物学实验表明,生物体跑、跳等节律运动是由位于脊髓中的CPG产生的[1]。CPG是一种由多个神经元构成的神经网络,可生成一系列节律性输出用于生物行走运动的控制[2]。而当神经网络或生物肢体受到损伤时,CPG可通过网络参数与神经元连接的调整,生成新的运动模式以维持躯体的运动[3]。
针对机器人在环境中的适应性问题,研究者们做出了不同的研究[4-6]。双足机器人在运动过程中,可能由于故障和损伤等情况,使其中一足的运动受到限制,无法继续跳跃。针对这种情况,在建立可变结构CPG运动控制机制的基础上,通过时间延迟响应环节的添加使控制系统能够响应机器人自身状态的改变,从而在突发状况下及时地改变系统的运动模式输出,以维持机器人的运动。
1 双足机器人模型及其运动方式
双足跳跃机器人结构模型如图1所示。机器人由2个相同的肢体腿A与腿B构成,每个肢体具有1个与躯体相连的转动关节,及腿部上的1个直线弹簧关节。转动关节由其上的力矩驱动器控制,而直线弹簧关节可由其上的直线驱动器压缩。
双足跳跃机器人通过两腿交替着地完成跳跃运动。当机器人正常运动时,每一肢体均接收其对侧肢体的实时状态以生成跳跃运动,即腿A着地与将要着地时,腿B随之收缩以避免与地面碰撞,而腿A结束1个着地周期后,腿B随之伸长,以准备下次着地。由于机器人双腿为对称结构,以机器人的1条腿为例,其几何参数如图2所示。

图1 双足跳跃机器人结构

图2 机器人的几何参数
机器人单足的跳跃运动过程分为着地相与摆动相。在着地过程中,机器人通过转动关节处的驱动器输出扭矩,维持机器人躯体与腿部的夹角τ以及器人躯体的平衡,并通过腿部弹簧处的直线驱动器动作,通过直线弹簧长度l的改变补充系统在跳跃过程中损耗的能量;在飞行相中通过机器人着地角θ的调节,来控制机器人的前进速度。控制系统通过控制转动关节与腿部弹簧处的驱动器输出,维持机器人的稳定跳跃。
2 可变结构的CPG控制结构
当双足跳跃机器人正常运动时,机器人的每一肢体均同时感知并接收自身与对侧肢体的运动状态,以此决定关节的运动输出。而当一侧肢体发生故障或受到限制,无法参与运动时,需要CPG控制系统改变自身的连接与结构方式,从两足的跳跃控制结构转换为单足的跳跃控制结构,且要求此时机器人单足能够在缺乏对侧肢体运动状态反馈的情况下,独立地控制单肢体继续维持跳跃运动。
基于此运动控制要求,建立了可变结构的CPG控制结构,如图3所示。可变结构的双足CPG控制结构由2个对称的控制单元组成,分别负责机器人腿A与腿B的运动控制。每个控制单元由4个神经元构成,分别接收来自自身运动状态的刺激性输入、来自对侧肢体的刺激与抑制性输入。当一侧的控制单元出现故障时,另一侧的控制单元可独立控制其所对应的机器人肢体,维持稳定的跳跃运动。
当机器人一侧肢体损坏或故障时,控制机制面临的第2个问题是传感信息的缺失。传感信息对机器人的稳定运动具有重要的意义,通过对传感信息的接收与处理,机器人可响应自身运动状态及与环境交互状态的变化,生成稳定的运动。当双足机器人正常跳跃时,机器人双足交替着地,其与环境的交互状态呈周期性变化,控制系统在周期性传感信息的激励下,生成两足交替的节律性运动;而当机器人一足损坏或受到限制时,周期性的传感信息反馈受到破坏,为维持机器人的稳定跳跃运动,需对维持运动的控制单元所接收的传感信息进行调整与补偿。
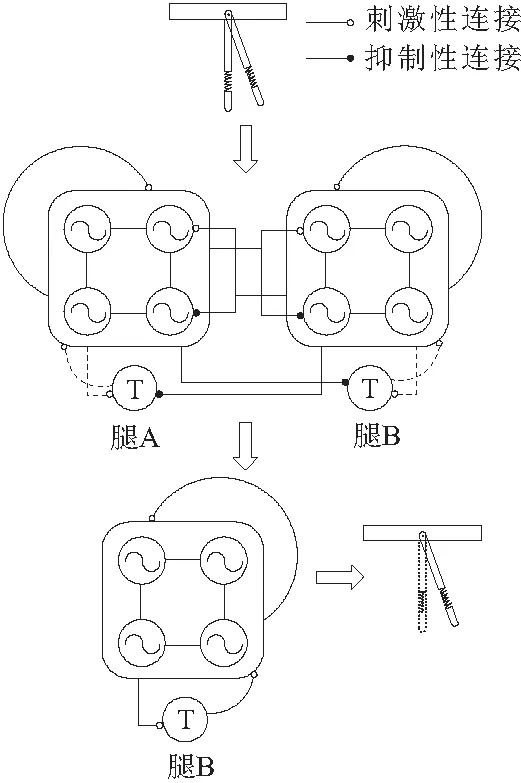
图3 可变结构CPG控制机制
在可变结构的CPG运动控制机制中增加了时间延迟响应环节T,以补偿突发情况对机器人传感信息反馈的影响。此时间延迟响应环节分别通过刺激性连接与其所对应的机器人肢体相连,同时受到对侧肢体的抑制。当机器人稳定跳跃时,此环节由于受到对侧肢体的抑制作用并不参与运动的控制,因此,其对机器人控制机制的刺激性作用以虚线表示。而当对侧肢体无法正常发送反馈信息时,此环节被激活,并代替对侧肢体发放刺激性脉冲以维持机器人的稳定跳跃运动。
3 CPG神经元网络模型
跳跃机器人在运动过程中,较难提前预知地面的高度与地形环境,而需要根据传感信息实时地感知地面状态,并根据传感信息迅速产生响应,调整机器人的运动以适应环境。根据此控制需求,选择Hopfield模型[7]构建CPG神经元网络。此神经元模型可快速响应超过其阈值的传感信息,迅速上升并达到峰值,其数学模型为:
(1)
yi为神经元膜电压;τi为时间常数;Ri为神经元传导的阻尼系数;xj为神经元接收的第j个反馈信息;σ(xj)为外界激励对神经元的作用强度;ωji为第j个反馈信息对第i个神经元的作用系数,为常数;Θj为反馈信息xj作用的阈值。此神经元模型可快速对超出神经元阈值的反馈信号作出响应并达到峰值,从而输出运动控制指令。
根据可变结构的CPG控制结构对神经元模型的需求,在Hopfield模型中对外界反馈项进行了调整,添加了神经元之间的网络抑制参数,并引入了时间延迟响应环节。以腿A为例,建立神经元网络模型为:
(2)
yBi为相对应于腿A第i个神经元的腿B的第i神经元输出;ωji为腿A所对应的神经网络中,第j个神经元对第i个神经元的作用系数;Ii为反馈项;xn为外界反馈项;Θn为xn所对应的阈值;T(A)为腿A神经元所接收的时延响应环节激励,由时间延迟环节fA与对侧抑制环节组成。fA的表达式为:
(3)
tA为常数,可由实验标定。在系统所建立的控制结构中,机器人每一足所对应的神经元网络由4个神经元构成,故i,j=1,2,3,4。通过李雅普诺夫稳定性方法,考察此神经网络连接系数的取值范围,并在此基础上根据可变结构控制机制对神经网络连接系数取值的要求,得到四神经元之间的连接矩阵为:
(4)
通过神经元之间连接矩阵,对侧足传感信息以及时延响应环节的添加,此神经元网络能够在对侧肢体正常运动时与对侧肢体交互抑制,生成稳定的节律性交替运动;而在对侧肢体受到限制或发生故障时,能够在时间延迟响应环节与自身网络的刺激、抑制作用连接下,控制机器人单足维持稳定的跳跃运动。
在此神经元网络中,神经元1与神经元2接收机器人足与地面的接触力信息,当接触力超过阈值时,产生响应并激活神经元3与神经元4的运动。神经元3,4接收机器人腿部弹簧的力信息,并与神经元1,2的信息调控输出节律性的动作信号,神经元3,4的输出为神经元网络的最终输出。
此神经元网络可模拟生物CPG生成节律性输出信号,用于控制机器人的动作时序,而机器人关节驱动器对这些运动命令的执行,则通过简单的运动神经元的构建来实现。其中,机器人躯体与肢体相连接部分的转动关节,其输出为力矩。以腿A为例,转动关节运动神经元的模型为:
(5)
φ为机器人腿与躯体的夹角;α为机器人躯体倾角;φd为转动关节运动的目标角,y3=1时,φd=0,而y4=1时,φd的值可根据机器人的目标速度由实验标定;k1,k2为反馈信息的作用系数,为大于零的常数,其值可由实验标定。腿A直线弹簧所对应的驱动器,其运动输出为:
(6)
Δl为机器人运动过程中腿部弹簧的最大压缩量;Δld为压缩量的目标值;k3,k4为大于零的常数,k4为反馈信息的作用系数,其值可由实验标定。
4 仿真实验
为验证控制方法的有效性,在ADAMS中建立双足机器人的虚拟样机,并利用Matlab/Simulink建立了相对应的控制机制,通过联合仿真对此控制方法进行验证。相平面轨迹如图4所示。

图4 相平面轨迹
由图4可以看出,机器人在2种运动状态下,其在相平面上的轨迹均收敛于一个稳定的极限环。实验结果表明,控制机制能够在2种状态下控制机器人实现稳定的跳跃运动。在受限运动状态下,机器人躯体倾角与角速度振荡的范围均大于在正常运动状态下的振荡范围。这是由于机器人运动受限的一侧肢体对机器人的运动存在影响,机器人单足需要同时克服机器人躯体与对侧足的转动惯性影响以维持机器人躯体的稳定跳跃。
考察突发状况对机器人运动的影响,首先考察机器人的运动节律能否在突发状态下维持稳定,通过机器人与地面的接触状态考察其运动节律的变化,实验结果如图5所示。图5中,实线与虚线分别为机器人腿A与腿B与地面的接触力,令机器人腿B在t=6 s时刻自由度受到限制。由图5可以看出,在6 s之前,机器人双腿交替接触地面,且两足与地面的支持力相等,而在6 s之后,腿B无法参与运动,而此时腿A仍可维持机器人的稳定跳跃运动,且其节律、接触力峰值保持不变。实验结果表明,系统提出的控制机制可在机器人一足无法参与运动的情况下,继续维持稳定的跳跃运动节律。
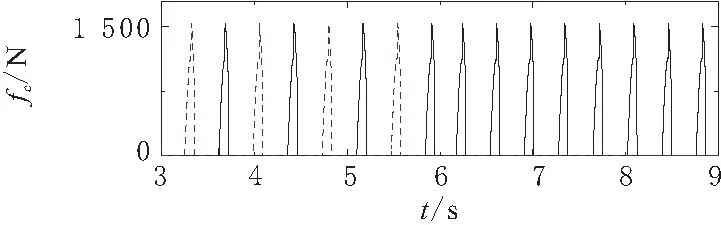
图5 机器人与地面的接触状态
进一步考察在此运动机制的控制下,突发状态对机器人其他运动参数的影响。由于机器人被限制在XY平面内运动,共有沿X轴、沿Y轴、绕Z轴3个方向的自由度。因此,分别对机器人在3个自由度上的运动进行考察,实验结果如图6所示。
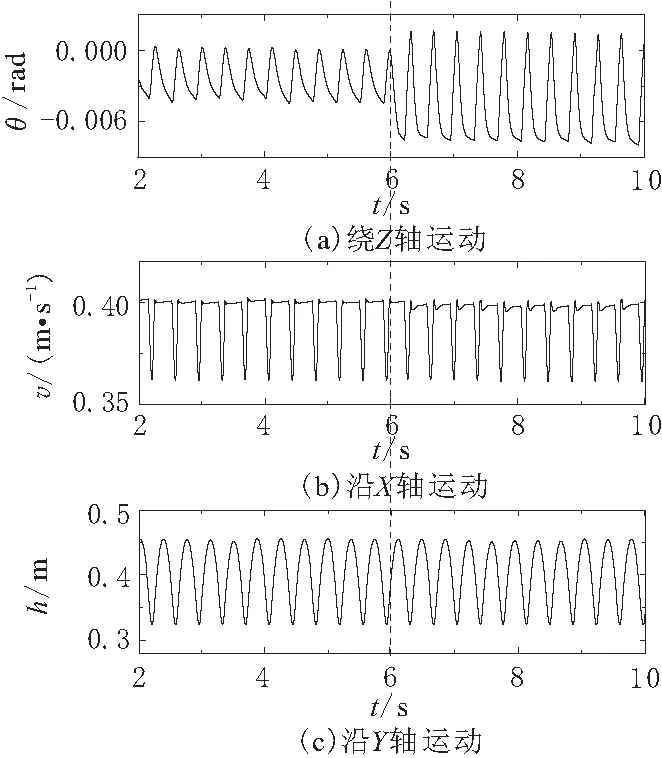
图6 机器人3个自由度上的运动
观察t=6 s以后机器人的运动,可以看出,机器人的跳跃高度基本维持不变,而前进速度在机器人切换至单足跳跃后,有一个较小的下降,其幅度值约为0.003 m/s。机器人的躯体倾角在切换至单足运动后,其振荡范围加大,由0.005 rad上升至0.01 rad左右,但仍可维持稳定振荡。实验结果表明,所提出的控制机制可在突发状况下,控制机器人在3个自由度方向上生成稳定运动,从而维持机器人的稳定跳跃。
5 结束语
模拟生物神经网络原理建立了一种新的适应性CPG运动控制机制。利用Hopfield神经元数学模型构建CPG神经网络模型,建立了能够快速响应传感信息变化,实时调整机器人运动节律的运动控制结构;模拟生物神经元响应机制,通过时间延迟响应环节的建立,实现了CPG神经网络对机械结构故障等突发情况的感知;在此基础上,进一步通过对生物神经元受到损伤时自恢复特性的模拟,利用时间延迟响应环节对神经元连接系数矩阵的调整,实现了机器人在损坏和自由度受限等情况下的稳定运动。为进一步提高机器人的适应能力,需要进一步完善的工作有:根据神经网络对突发状态的感知,在调节机器人连接系数矩阵的基础上进一步实现关节运动轨迹的调节,增加运动的柔顺性与适应能力。
[1] Delcomyn F.Neural basis of rhythmic behavior in animals[J].Science,1980,210:492-498.
[2] Brembs B.Operant conditioning in invertebrates[J].Current Opinion in Neurobiology,2003,13(6):710-717.
[3] Rossignol S.Locomotion and its recovery after spinal injury[J].Current Opinion in Neurobiology,2000,10(6):708-716.
[4] Kimura H,Fukuoka Y,Cohen A H.Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts[J].International Journal of Robotics Research,2007,26(5):475-490.
[5] Taga G,Yamaguchi Y,Shimizu H.Self organized control of bipedal locomotion by neural oscillators in unpredictable environment[J].Biological Cybernetics,1991,65(3):147-159.
[6] Zhang X,E M,Zeng X,et al.Adaptive walking of a quadrupedal robot based on layered biological reflexes[J].Chinese Journal of Mechanical Engineering,2012,25(4):654-664.
[7] Gallagher J C,Beer R D,Espenschied K S,et al.Application of evolved locomotion controllers to a hexapod robot[J].Robotics and Autonomous Systems,1996,19(1):95-103.
Adaptive Motion Control of a Biped Jumping Robot Based on CPG
WANGTingting,ZHAFusheng,GUOWei,LIMantian,SUNLining
(State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150001,China)
为解决双足跳跃机器人在突发状况下的适应性控制问题,依据生物中枢模式发生器(CPG)运动控制原理,建立了可变结构的CPG运动控制机制;模拟生物神经网络的自重构特性,在运动控制机制中添加了时间延迟响应环节,用于突发状况的判断与调节。在机器人肢体突发故障或运动受到限制时,此机制可通过对自身状态的感知自发地调整神经网络结构,以继续维持稳定的运动。最后,在仿真平台上验证了此控制机制在正常行走与肢体自由度突然受到限制2种情况下的控制效果。
双足机器人;适应性控制;CPG;跳跃运动控制
For solving the adapt control problem of biped hopping robot in unexpected situations,we build a CPG control mechanism which is able to change its control structure according to robot motion status simulating the CPG control mechanism in animals.Imitating the self-reconfigurable feature of animal control mechanism,a time-delayed response link is added to this control mechanism,for judging and adjusting the robot motion under unexpected situations.When the limbs of robot suddenly fails or the motion of robot limb is restricted,this control mechanism can spontaneously adjust the structure of neural network according to perception of the robot motion status,and maintain stable hopping motion.Finally,this control mechanism is studied on a simulation platform under two situations:normal hopping and hopping when one robot limb suddenly fails.
biped robot;adaptive motion control;CPG;control of jumping motion
2014-01-15
国家自然科学基金资助项目(61175107,60901074);机器人技术与系统国家重点实验室自主课题(SKLRS200801B,SKLRS201204B)
TP242.6
A
1001-2257(2014)07-0056-04
王婷婷(1984-),女,黑龙江克东人,博士研究生,研究方向为仿生机器人。
