遗传算法优化的模糊系统在发酵pH控制的应用
2014-09-06
(北京化工大学机电工程学院,北京 100029)
遗传算法优化的模糊系统在发酵pH控制的应用
陈俊昕
(北京化工大学机电工程学院,北京 100029)
针对生物发酵过程中pH值的变化存在严重的非线性、时滞性和时变性等特点,采用模糊自适应PID控制方案,能够实时地在线整定PID控制参数,通过执行机构控制加入发酵罐中碱液的量实现pH控制,并采用遗传算法对PID初始参数进行优化。仿真结果表明,遗传算法优化后的模糊自适应PID控制具有上升快、调节精度高、稳定性好、过渡过程时间短和超调量小等优点,因此是有效的、可行的方案。最后,进行了软硬件的设计并做了验证实验。
生物发酵;模糊自适应;PID控制参数;遗传算法
0 引言
发酵过程是通过人为控制各种微生物的生长,可以大量产生特定的目标代谢产物的生化反应过程[1]。发酵环境对微生物生长繁殖的影响是非常显著的,pH值是其中最重要的影响因子之一[2]。然而pH值的控制存在非线性、时变性和纯滞后的特性,成为控制领域中的最难控制的参数之一。常规的PID控制是以同一组控制参数来实现整个过程控制,很难兼顾不同控制阶段的控制要求,控制效果较差。增量式三区段非线性变增益PID控制,能够降低中和反应中时滞和非线性对于系统的影响,但是,区段的划分成为了这种控制方法的难点,划分不合理就难以取得满意的控制效果[3]。因此,提出了遗传算法优化的模糊自适应PID控制,成功应用于生物发酵过程中,通过执行机构,如流量泵来控制加入发酵罐中氨水的量,从而实现了发酵过程中pH的精确控制,获得更好的控制效果。
1 控制算法的设计
1.1 模糊自适应PID
模糊自适应PID是一种简单的学习控制,结构如图1所示。其主要优点是对参数的变化和环境的变化不敏感,可适用于非线性对象,并且收敛速度快、鲁棒性好,特别是它能在运行中不断修正自己的控制规则以改善控制性能[4]。

图1 模糊自适应PID控制器结构
1.2 pH模糊自适应PID控制器的设计
1.2.1 控制器输入和输出变量的确定
控制器的输入变量为采样pH值和设定pH值的偏差e以及偏差变化率ec,输出变量为PID控制3个参数的增量ΔKP,ΔKI,ΔKD。每个采样时刻离散的偏差和偏差变化为:
E(n)=pHset-pH(n)
(1)
EC(n)=E(n)-E(n-1)
(2)
1.2.2 控制器输入输出模糊语言描述
E,EC以及KP的论域定义均为{-3,-2,-1,0,1,2,3}。KI和KD的论域定义均为{-0.06,-0.04,-0.02,0,0.02,0.04,0.06}。它们的模糊子集均为{NB,NM,NS,ZE,PS,PM,PB},分别表示负大、负中、负小、零、正小、正中和正大。
根据发酵过程的pH控制要求,设计偏差e实际的变化范围为[-7,7],因此,偏差变化率ec的变化范围也为[-7,7]。输出量ΔKP的实际变化范围为[-0.005,0.005],ΔKI和ΔKD的实际变化范围为[-0.001,0.001]。设e和ec的量化因子分别为Ke和Kec,而ΔKP,ΔKI,ΔKD的比例因子分别为Ku1,Ku2,Ku3,根据映射关系,可得Ke=Kec=3/7,Ku1=0.005/3,Ku2=Ku3=0.001/0.06。
1.2.3 控制器各模糊变量赋值表的确定
由于工程中往往采用形式更简单,计算更简便的隶属度函数,所以,选择三角隶属度函数对模糊变量赋值,也就是确定论域内元素对模糊语言变量的隶属度[5]。
1.2.4 控制器模糊控制规则的设计
在设置模糊控制规则的时候,需要重点考虑2个问题[6],pH值变化的基本特征以及PID各个控制参数的不同影响。
a. 当表示实际偏差的绝对差|e|很大的时候,应该采用一个较大的KP。这时pH值得变化比较缓慢。为了防止积分饱和导致大的超调,通常取较小的KI。微分系数KD的大小对系统的响应速度有重大的影响。在设置KD时,应该考虑实际偏差e和实际偏差率ec的运算符号。当e×ec>0时,实际的pH值偏离给定值,这时PID控制器应当有一个较大的KD值;当e×ec<0时,实际的pH值接近于给定值,PID控制器应该有一个更小的KD值。
b.当|e|的值适中的时候,为了防止系统超调,通常取较小的KP和KI。在设置微分系数KD时,应该考虑e和ec的运算符号。当e×ec>0时,PID控制器应该有一个较大的KD值;当e×ec<0时,为了获得适当的响应速度和较小的超调量,应取适中的KD值。
c.当|e|很小接近于零且|ec|也很小的时候,为了获得更好的调节速度,PID控制器需要有一个较大的KP值和较大的KI值。考虑系统的抗干扰性能,应当取较大的KD值。如果|ec|的值很大,PID控制器应当取一个较小的KD,适中的KI和KP。
生物发酵过程中,pH值模糊自适应PID控制规则的制定,主要是通过上述PID自整定参数原则,同时也是操作人员和专家的经验知识总结,并结合工程设计的技术知识和实际的操作经验。
模糊推理是指根据模糊输入和模糊规则,按照确定好的推理方法进行推理,得到模糊量[7]。所设计的pH值模糊自适应PID控制器的模糊推理方法选用MAX-MIN法,即Mamdani法,因为其规则的行事符合人们思维和语言表达的习惯,方便表达人类的知识,所以比较简便和常用。
1.2.5 控制器输出变量解模糊化和PID参数自整定
(3)
通过重心法分别计算出发酵过程中pH值模糊自适应PID控制器的精确输出值ΔKP,ΔKI,ΔKD,也就是PID参数KP,KI,KD的增量值。通过下式计算出实时的PID参数KP,KI,KD,完成PID参数的在线自整定,最后实现对生物发酵过程中pH值的实时控制。
(4)
KP0,KI0,KD0为控制系统初始设定的PID参数。
2 控制系统的仿真设计
在Matlab的命令窗口中运行fuzzy函数,进入模糊推理系统FIS编辑器[10]。然后在规则编辑器Rule Editor窗口中输入模糊控制规则[11],设定模糊决策为Mamdani型推理算法,解模糊为重心法(centroid)。设定控制器的结构为2输入、3输出,并确定变量名,分别编辑输入输出的论域区间和隶属度函数曲线。最后,保存一个模糊系统时,模糊逻辑工具箱自动建立一个FIS文件,命名为fpid.fis。为了使FIS文件同Simulink连接,给下一步的系统仿真做好准备,必须建立一个命名为fpid.m的文件,在文件中编辑语句fpid=readfis(‘fpid.fis’)。在利用Simulink使用模糊逻辑工具箱进行仿真前,必须在Matlab命令窗口执行fpid,把FIS转化为Matlab结构,接下来就可以在Simulink中建立控制器的系统仿真框图了。常规PID和模糊自适应PID系统仿真的阶跃响应曲线分别如图2,图3所示。
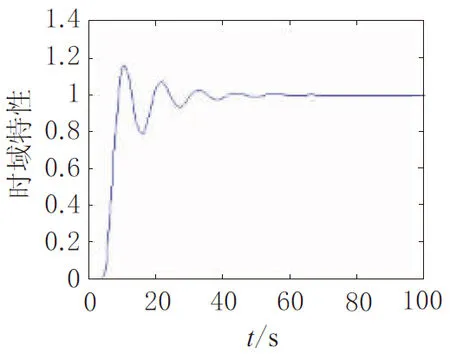
图2 常规PID阶跃响应曲线
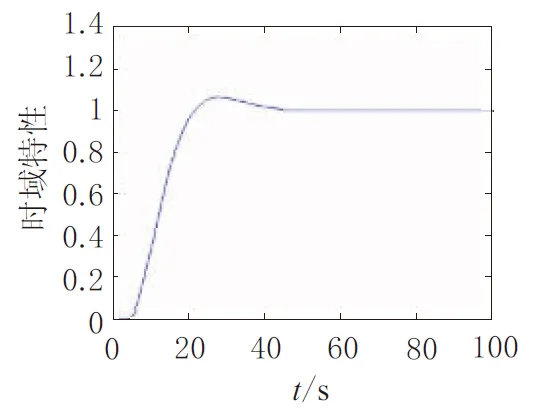
图3 模糊自适应PID阶跃响应曲线
对仿真结果进行分析可知,模糊自适应PID控制克服了常规PID控制的缺点,实现了系统调节时间短、超调量小和稳态误差小的性能指标,可以很好地完成生物发酵过程中pH的控制。
3 自适应遗传算法对模糊PID初始参数的优化
PID初始参数整定是控制系统设计的核心内容。采用不同的PID初始参数,控制系统的效果大不相同。PID控制器的性能很大程度上决定了控制系统的闭环特性,然而对于控制器初始参数的调节和优化,决定着PID控制系统可以达到的最终控制性能,成为PID控制系统研究中很重要的领域。
遗传算法是模仿生物进化思想的一种自适应启发式全局搜索算法[12],一般应用步骤如下:
a.确定问题的解空间,将其表示成编码串,即染色体。
b.建立优化模型,确定目标函数以及适应度函数。
c.确定表示解的染色体编码和解码方法。将染色体译码成寻优函数,计算出对应目标函数并变换成适应值。
d.确定选择、交叉和变异等遗传操作的具体实现方法。
e.确定遗传算法的运行参数,如种群大小、交叉率和变异率等。
f.返回步骤c,直到满足条件为止。
在Matlab中搭建遗传算法工具箱,通过遗传迭代寻优,计算出满足约束条件的PID初始参数,然后在Simulink下进行仿真,可得系统阶跃响应曲线如图4所示。

图4 遗传算法优化后的模糊自适应PID响应曲线
相比于通过Z-N法整定PID初始参数的模糊自适应PID控制而言,通过遗传算法优化PID初始参数的控制策略,在调节时间和超调量方面可以得到更优的控制效果。不同控制系统性能比较如表1所示。
表1 不同控制系统性能比较
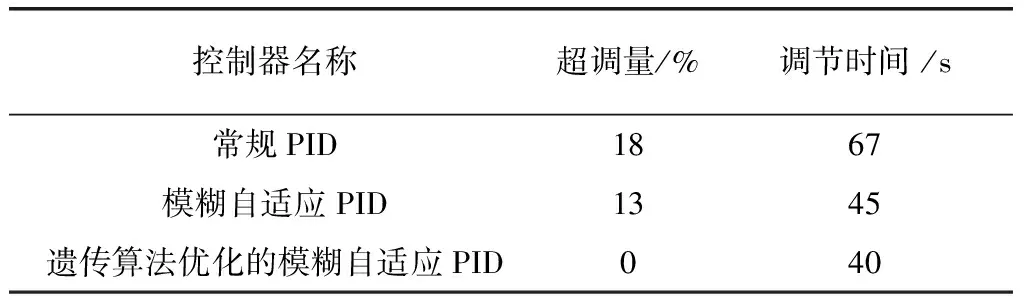
控制器名称超调量/%调节时间/s常规PID1867模糊自适应PID1345遗传算法优化的模糊自适应PID040
4 实验与结论
为了验证遗传算法优化的模糊自适应PID控制系统,在生物发酵过程中对于pH值控制存在优势,设计了发酵实验。发酵对象是酵母菌,引导物是蛋氨酸,产物是腺苷蛋氨酸。做了3组对比性试验,在同样的5 L的发酵罐中,保证整个发酵过程中乙醇浓度值以及对应的补糖速率采用同一标准,分别采用上述3种控制系统对pH值进行控制,最后得到样品产量及其转化率,如表2所示。
表2 不同控制系统的实验数据

控制器名称样品产量/(g/L)转化率/%常规PID12.5827.48模糊自适应PID13.2128.86遗传算法优化的模糊自适应PID13.7430.05
根据上述实验数据,可以得出通过遗传算法优化的模糊自适应PID控制生物发酵过程中的pH值,对于提高样品产量和转化率具有优势。相对于传统的控制策略,遗传算法优化的模糊自适应PID控制,在生物发酵过程的pH控制中效果明显提升。
5 结束语
以发酵过程的pH值作为控制对象,采用遗传算法优化的模糊自适应PID控制方案来进行控制,解决了常规控制系统的非线性和大滞后问题,具有良好的动态响应特性和稳定性,控制效果得到进一步改善。虽然在采用遗传算法优化PID初始参数方面取得了满意的控制效果,但是还有很多研究工作要做,如对隶属度函数和模糊控制规则的优化,研究多目标寻优的相互影响,设计出更完善的控制策略等。
[1] 刘建峰.发酵过程参数检测及系统控制[D].南昌:南昌大学, 2012.
[2] 刘仲汇,杨 艳,史建国,等.pH温度智能控制系统在葡萄糖酸钠发酵中的应用[J].粮食与食品工业,2008,15(6):24-26.
[3] 杨照华, 杨 智,王慧中.两种新型pH值的控制方法研究[J].甘肃工业大学学报, 2001, 27(3): 51-54.
[4] 胡广平.模糊自适应PID控制镍点解pH控制中的应用研究[D].兰州:兰州理工大学, 2006.
[5] 王季方, 卢正鼎.模糊控制中隶属度函数的确定方法[J].河南科学, 2000,18(4): 348-351.
[6] Xie S H. Research about fuzzy-PID control method of pH value in chemical industry process[C]∥ 2010 International Conference on Electrical and Control Engineering,2010:1554-1557.
[7] 钟 飞, 钟毓宁.Mamdani与Sugeno型模糊推理的应用研究[J].湖北工业大学学报,2005,20(2):28-30.
[8] 罗 斌.重载平板车转向系统模糊PID控制研究[D].长沙:中南大学,2007.
[9] 李霄燕,吕利娟,袁金环.自调整模糊PID及其在pH值控制中的仿真研究[J].气象水文海洋仪器,2008,(4):22-24.
[10] 刘 冰,李 文,丁鸣艳.基于Matlab的模糊PID控制系统的设计及其仿真[J].仪器仪表用户,2006,13(2):87-89.
[11] 费春国.模糊自调整控制器的研究与应用[D].天津:天津科技大学,2003.
[12] 温 良,杨明国,贺小峰,等.基于自适应遗传算法优化的模糊 PID 控制在实验轧机中的应用研究[J].机床与液压,2011,39(17):27-29.
Fuzzy System of Genetic Algorithm Optimization and Its Application on pHControl of Fermentation
CHENJunxin
(College of Mechanical and Engineering,Beijing University of Chemical Technology,Beijing 100029,China )
For there is a change of pH value of the fermentation in serious nonlinear, time delay and time-varying, fuzzy adaptive PID control solution can online tune PID control parameters in real-time, pH control can be achieved by actuator controlling the amount of alkali liquor added to the fermentation tank, and genetic algorithm can be used to optimize the initial parameters of PID. The simulation results show that the fuzzy adaptive PID control of genetic algorithm optimization has advantages of rising fast, high precision adjustment, good stability, short transition time, small overshoot. Therefore, it is effective, feasible solution. Finally, we designed the software and hardware and did verification experiment.
fermentation;fuzzy adaptive;parameters of PID;genetic algorithm
2014-02-28
国家重点基础研究发展计划(973计划)资助项目(2013CB733603)
TP273
A
1001-2257(2014)07-0007-04
陈俊昕(1988-),男,四川达州人,硕士研究生,研究方向为光机电一体化及生命科学仪器。
