超声雾化场粒径Raman /Mie双光谱测量系统设计
2014-09-06,,
,,
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
超声雾化场粒径Raman /Mie双光谱测量系统设计
张钟秀,刘维来,王克逸
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
为获得煤油超声雾化场粒径二维分布信息,摆脱示踪剂对测量的影响和干扰,设计了基于Raman/Mie双光谱成像法的测量系统。首先介绍了Raman/Mie双光谱成像法测量原理,然后给出测量系统结构设计,并对系统各元件进行了合理的参数设计选型,最后讨论了系统时序控制方法。
煤油;超声速气流;雾化;液滴直径;Raman/Mie散射
0 引言
超燃冲压发动机是实现高超声速飞行器的首要关键技术,是目前世界各国竞相发展的热点领域之一。煤油超燃雾化是研制煤油超燃发动机的关键问题,但是射流破碎和雾化是流体力学最为困难和尚未解决的基本问题之一。煤油超燃雾化现象和粒径测量极具挑战性,尽管该问题已得到广泛研究,但有待于发展雾化场粒径分布的精细在线测量方法,以便给煤油超燃发动机研制,特别是燃烧室设计和评价提供基础性数据。
纹影和阴影等传统光学方法适合显示流场波细结构,但分辨率低、沿光程有积分效应,因此,不适合研究液体射流破碎和混合现象。激光全息[1-2]测量可给出二维粒径分布结果,但存在沿光路积分效应,数据量大且处理效率低。PDPA[3]光路复杂、成本昂贵,对测试环境要求高,难以适合发动机和大型超声速风洞等真实测量环境(噪音、振动和油污等)。光谱/散射光成像测量粒径二维分布是近10年快速发展的技术,具有测量效率高、光路简单和提供信息量大等特点,适合环境恶劣雾化场的在线测量,具有较好的应用前景。其中Raman/Mie较PLIF/Mie更具优越性,前者较后者定标及粒径反演过程要简单、可靠。对于PLIF,一般需要采用荧光示踪剂。不同测量过程示踪剂浓度可能会不一样,另外示踪剂会随着蒸发而浓缩,示踪剂浓度对荧光强度和粒径关系有较大的影响,同时,在使用过程中,要使荧光示踪剂辐射强度限制在饱和条件以下,以上因素使得PLIF/Mie法对于粒径定量测量变得复杂。
Raman/Mie图像法也是利用片激光激发进行二维粒径测量的方法[4]。由于Raman散射不需要示踪剂,其粒径定标不受蒸发的影响。且对于透明液体,Raman的激励能力不会衰减减弱,测量粒径的反演过程相对简单。Raman/Mie图像法测量的主要挑战在于Raman散射光比较微弱,而且还与很强的Mie散射光混合在一起,需要复杂的光学滤波器和光探测器。随着相干滤波器和高精度CCD的发展,Raman/Mie图像法已经显示出其自身的可行性及优越性。
1 Raman/Mie双光谱测量原理
受激光激发,煤油液滴会产生Mie散射和Raman散射。煤油为含有C=O键的混合物,易受激发产生荧光和Raman散射光谱,并且只有采用紫外激光(波长小于400nm)激发,煤油才能产生荧光且荧光波长范围为100~500nm[5]。选择波长532nm激光作为激发光源,即可忽略所产生的煤油荧光及其对测量的影响。煤油受激产生的Raman光谱波数范围约700~1700cm-1。如果用532nm激光激发,煤油Raman散射Stocks谱线位于542~573nm。Raman散射光强很弱,约为煤油Mie散射光强的10-4~10-6[6],必须分离强度相差较大的Raman和Mie散射光,以降低Mie散射光对于Raman散射光的干扰。
Raman散射光极其微弱,易受到光、电磁和热噪声干扰,需综合采用噪声滤除算法、保持ICCD低温条件和光路优化设计等措施。在噪声滤除算法方面,可采用黑暗噪声修正法、像素值阈值过滤法、相邻像素值取和平均法、小波神经网络法和多幅图像叠加平均法[4,7-9]等。
在统计意义上,Raman散射光强和颗粒d3成正比(d为直径),而Mie散射光强和颗粒d2成正比。若在单元区域存在数密度为N的Raman活性粒子群,受激发后,其Raman散射光强用IR表示,Mie散射光强用IM表示,则粒子SMD(sauter mean diameter)粒径为:

(1)
SMDN为单元区粒径SMD值;IR和IM分别为单元区在ICCD中散射光成像的像素值和;di为单元区各粒子等效粒径;K和K1为系数。

(2)
利用PDA和Raman/Mie散射光成像测量多个单元区域,再利用式(2),可得到一组(IR/IM,K)值。再利用最小二乘法多项式拟合,得出IR/IM和K关系曲线。由ICCD得到的Raman和Mie散射光图像,通过算法可得到图像对应单元区IR/IM值。根据式(1),结合定标得到的IR/IM和K曲线,可反演出各单元区SMD值,从而得到片激光成像截面SMD分布。
2 系统结构设计
2.1 系统构成
Raman/Mie双光谱成像测量系统结构如图1所示。其工作过程为:激光器产生激光束经过凹柱透镜和凸透镜形成片激光,片激光经过反射镜反射进入雾化场实验段,激发产生的Raman散射光和Mie散射光经Raman二向色镜分光,Raman散射光透射经过陷波滤光镜成像于ICCD,Mie散射光反射经过中性灰滤光镜成像于CCD。

图1 Raman/Mie双光谱测量系统结构
PDA标定光路如图2所示。除了PDA外,其他部分与图1相同。这里增加了PDA激光发射头和激光接收器。当进行PDA标定时,不需片激光进入雾化区。当片光进入雾化区时,PDA发射激光不进入雾化区。
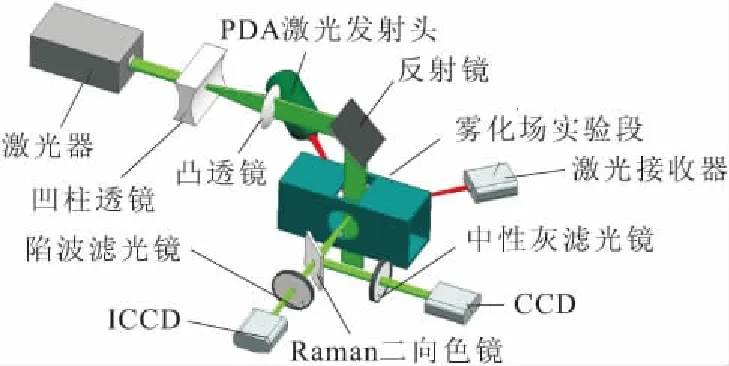
图2 PDA标定光路
2.2 光路系统
参考图1所示的光路系统。包括光源、光路系统(含片光展开)和成像系统。由带外触发信号控制的脉冲激光器产生线激光,利用凹柱透镜扩束,再经球形凸透镜汇聚为厚度小于0.3mm片激光。凸透镜焦距应尽可能长,使得片光在实验段内厚度变化较小,各位置能量密度较为均匀。经反射镜使其进入雾化场且和侧面观察窗平行。雾化区煤油液滴受片光激发,会产生Raman和Mie散射光。采用Raman二向色镜将Raman和Mie散射光分开。其中,Raman散射光通过Raman二向色镜,经陷波滤光镜后,可滤除Mie散射光,Raman散射光在ICCD上成像。由Raman二向色镜反射的Mie散射光,经过中性灰滤光镜衰减后在CCD成像。与PLIF相比,Raman散射的光路系统更为简单。
2.3 元件参数设计选型
2.3.1 激光器
当其他条件相同,Raman散射光强随入射激光功率增大而线性增大。在未达到饱和Raman散射光的前提下,选用功率较大的激光器,会得到更强的Raman光,有利于Raman光谱测量。选择Spectra-Physics公司的Nd:YAG激光器(Quallta-Ray Pro-250-10,如图3a所示)。该激光器频率为10Hz,波长为1064nm的最大脉冲输出能量为1.5 J,经二倍频后泵浦光的波长为532nm,单脉冲能量约为850mJ。
2.3.2 成像相机
Raman信号很微弱,对CCD灵敏度和信噪比要求高,所以选择ICCD获得Raman光谱成像。选择美国Princeton Instruments公司产品PI-MAX-ICCD(1024×1024,f=1.8,门宽最小2ns,如图3b所示),分别带有快门开闭和增益开闭4个外触
图3 激光器和ICCD相机
发信号控制端口。Mie散射光较强,可采用普通CCD相机,对灵敏度和信噪比要求不高,可选择高速CCD相机(FASTCAM SA5 1000K-M3,1024×1024/7 000fps,带外触发控制端口),配有焦距为100mm和80~200mm(f均为2.8)镜头。
2.3.3 滤光镜
根据上述煤油光谱分析,Raman二向色镜可选择Semrock公司的LPD01-532RU-25,通带为538.9~824.8 nm,过渡带宽波数为< 186 cm-1。用532nm激光激发,煤油Raman散射Stocks谱线位于542~573nm。图4a为所选二向色镜的透射性能曲线,图4b为所选二向色镜的反射性能曲线,可见542~573nm的Raman散射光可几乎全部透过,而Mie散射光几乎全部被反射。

图4 LPD01-532RU-25 二向色镜透射/反射性能曲线
为降低Mie散射光对Raman散射光信号的干扰,可选用LP03-532RE-25陷波滤光镜,其性能曲线如图5所示。滤光镜对Mie散射光的衰减系数达10-6(ODabs > 6 532nm)。Mie散射光较强,为使其Mie散射光成像于CCD在线性响应区,需在Mie散射光路中间布置中性灰滤光镜。
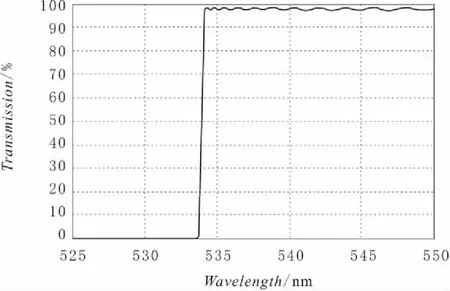
图5 LP03-532RE-25陷波滤光镜性能曲线
3 时序控制方法
测量系统需要进行时序控制。利用外触发信号触发DG535,由DG535输出延时信号控制YAG激光器氙灯,DG535另一路输出信号触发时序控制器并输出2路信号,分别经预设延时触发ICCD和CCD摄像机,使ICCD和CCD快门与Raman和Mie散射光同步,捕捉散射光图像。为获得高信噪比图像,应保证ICCD和CCD打开时和煤油散射光出现同步。为了获得最佳信噪比图像,需预先用光电倍增管(PMT)测量Raman和Mie散射光寿命及其光强随时间变化,以便确定2个相机的最佳延时。
4 结束语
介绍了Raman/Mie双光谱成像法测量原理,给出测量系统结构设计,采用的Raman/Mie双光谱成像测量方法对比与其他传统测量方法具有很多优越性。然后进一步对系统各器件进行了讨论和分析,并讨论了系统时序控制方法。
[1] 王德中,黄 震,张连方. 激光技术在燃油喷雾测试中应用的近战[J].激光技术,1995,19(1):26-33.
[2] 杨顺华. 超声速气流中的射流雾化实验和数值模拟[D].合肥:中国科学技术大学, 2010.
[3] Jackson L K. Structures of water jets in a mach 1.94supersonic crossflow [C]∥AIAA 2004-971, 2004.
[4] Malarski A, Schürer B, Schmitz I, et al. Laser sheet dropsizing based on two-dimensional Raman and Mie scattering[J]. Applied Optics,2009,48(10):1853-1860.
[5] 田广军, 尚丽平, 史锦珊. 油类三维荧光谱测量及其指纹图统计特征[J]. 仪器仪表学报, 2004, 25(4):819-823.
[6] 李 晟, 戴连奎. 一种基于拉曼光谱的石油产品快速分类方法[J].光谱与光谱学, 2011, 31(10): 2747-2572.
[7] Malarski A, Egermann J, Zehnder J,et al.Simultaneous application of single-shot Ramanography and particle image velocimetry[J].Optics Letters, 2006,31(7): 1005-1007.
[8] 佟首峰,阮 锦,郝志航.CCD图像传感器降噪技术的研究[J].光学精密工程, 2000,8(2):140-145.
[9] 邓 超,张 涛,姚清华.应用小波神经网络处理CCD图像噪声[J]. 光学精密工程,2008,16(2):345-351.
Design of Raman/Mie Dual Spectrum Measurement System ofParticle Size Distribution in Ultrasonic Atomization Field
ZHANGZhongxiu,LIUWeilai,WANGKeyi
(Department of Precision Machinery and Precision Instrumentation, University of Science and Technology of China, Hefei 230027, China)
In order to obtain a two-dimensional particle-field ultrasonic atomizer kerosene distribution information, and to get rid of tracer measurements influence and interference, this paper is designed based on Raman/Mie dual spectrum imaging measurement system. First of all, the Raman/Mie dual spectrum imaging measurement principle is introduced. Secondly, the measurement system structure is designed, and components of the system are chosen. Finally, the system timing control method is given.
kerosene; supersonic flow; atomization; droplet SMD; Raman/Mie scattering
2014-04-16
国家自然科学基金资助项目(11272309)
TH741.4
A
1001-2257(2014)09-0003-03
张钟秀(1989-),男,江苏连云港人,硕士研究生,研究方向为嵌入式系统以及发动机雾化激光诊断技术;刘维来(1970-),男,安徽六安人,讲师,研究方向为光电测量技术和智能信号处理以及煤油超燃光学诊断。
